Adapter 통신
Adapter 통신의 기본 개념을 이해한 후 사용자는 실제 프로젝트와 사용된 외부 장치를 참조하여 실제 적용 및 배포 프로세스에서 Adapter 통신과 관련된 작업을 완료해야 합니다.
| 본 매뉴얼은 주로 배포 프로세스에서 통신과 관련된 부분을 소개합니다. 배포 프로세스의 기타 상세한 작업에 대해서는 애플리케이션 배포 프로세스 중 각 섹션의 소개 내용을 참조하시기 바랍니다. |
| 작업 | 설명 |
|---|---|
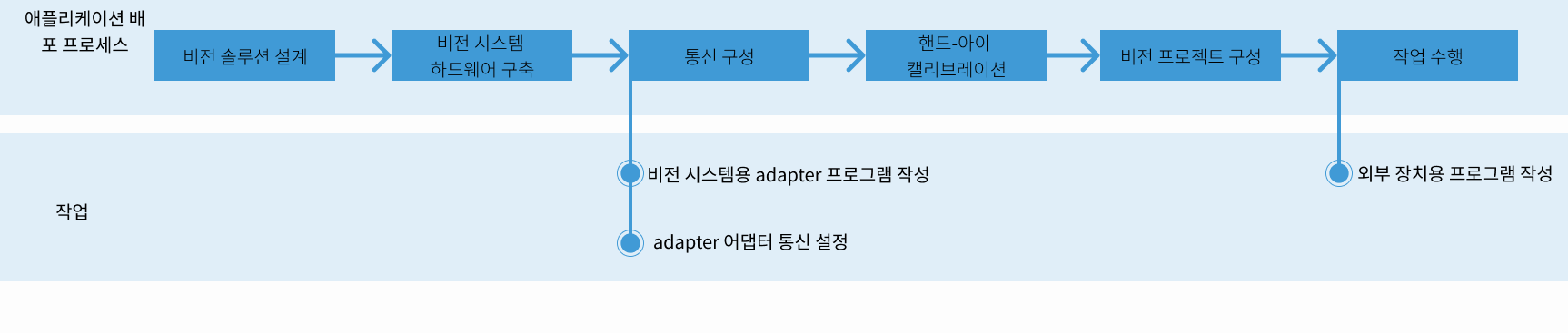
비전 시스템 측의 Adapter 프로그램 작성 |
Adapter 프로그램은 외부 장치와 비전 시스템을 연결하는 역할을 하며, 내부적으로는 Mech-Vision 및 Mech-Viz와 통신하고 외부적으로는 로봇, PLC 또는 호스트 컴퓨터와 통신합니다. Adapter 프로그램은 Python 코드로 구현되며, 구체적인 구현 방법에는 두 가지가 있습니다.
|
Adapter 통신 구성 |
작성된 Adapter 프로그램을 비전 시스템에 구성하여 비전 시스템 측에서 Adapter 통신 서비스가 시작됨을 확인하며 구체적인 작업은 Adapter 통신 구성 내용을 참조하시기 바랍니다. |
외부 장치 측 프로그램 작성 |
외부 장치 측 프로그램의 주요 기능은 비전 시스템 측에서 대상 물체 정보 또는 로봇 이동 경로를 획득한 후 로봇, PLC 또는 호스트 컴퓨터가 해당 작업을 수행하도록 안내하는 것입니다. |