CRX 플러그인을 통해 자동 캘리브레이션 수행
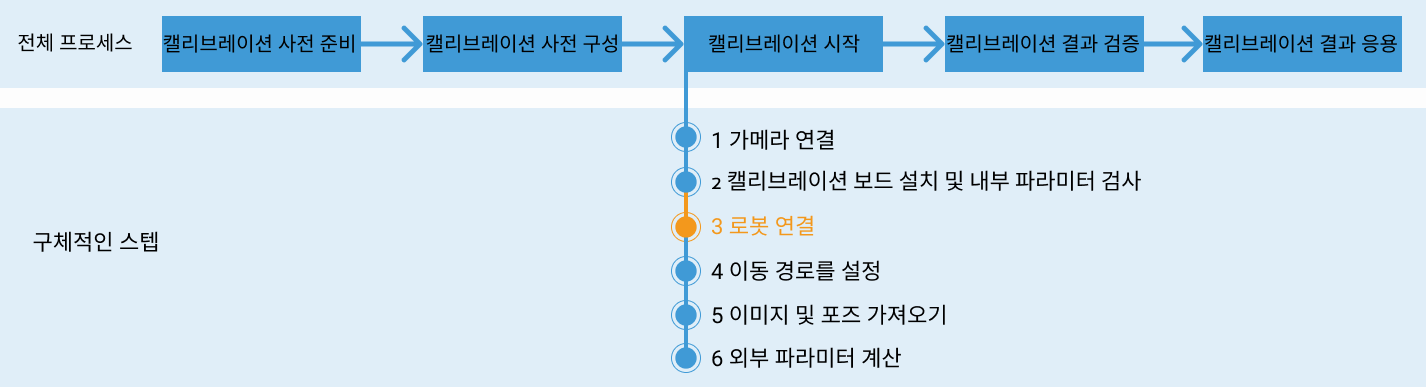
표준 인터페이스 통신을 설정한 후, 로봇을 연결하여 자동 캘리브레이션을 수행할 수 있습니다. 자동 캘리브레이션의 전체적인 프로세스는 아래 그림과 같습니다.
특별 참고 사항
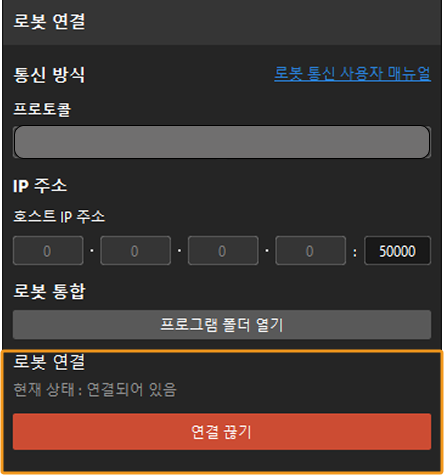
캘리브레이션을 실행할 때 Mech-Vision 소프트웨어 화면의 "로봇을 연결하기" 스텝에서 로봇이 연결되기를 기다리는 중... 버튼이 나타나면 사용자는 아래 스텝에 따라 로봇 측에서 작업을 수행해야 하며, 작업 완료 후 Mech-Vision 소프트웨어에서 나머지 단계를 진행하십시오.
|
1. 캘리브레이션 프로그램을 만들기
-
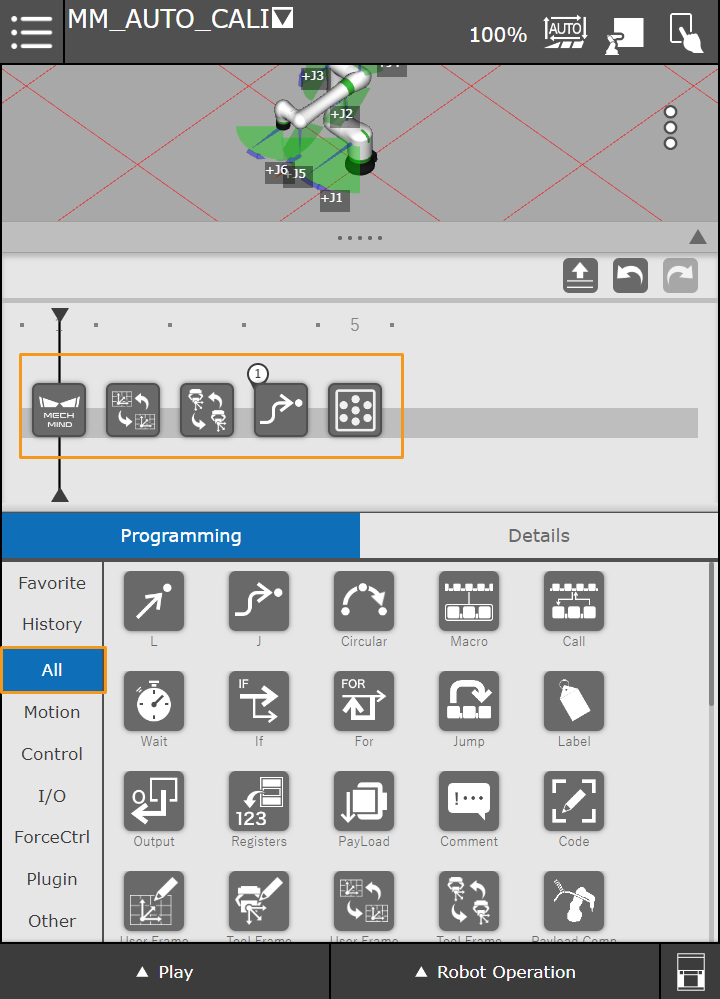
새로운 로봇 프로그램을 생성합니다(본 샘플에서는 MM_AUTO_CALI). Programming*을 클릭하고 왼쪽 *ALL 명령어 탭에서 다음 순서로 명령어를 프로그램 라인으로 드래그하십시오: Mech-System 통신 초기화, User Frame Select(사용자 좌표계 선택), Tool Frame Select(말단장치 좌표계 선택), J(이동), Mech-Eye 카메라 캘리브레이션.
-
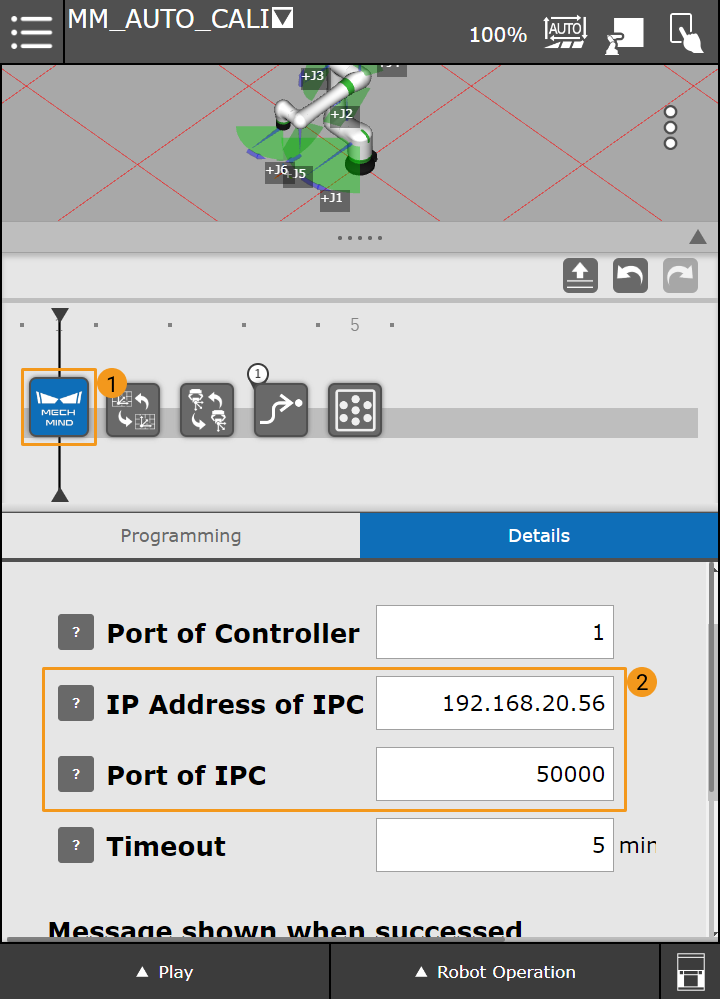
Mech-SystemSocketInit를 한 번 클릭하고 이 명령어의 자세 정보 화면에 들어갑니다. 여기서 *IP Address of IPC*를 IPC의 IP 주소로 설정하고 *IPC 포트*를 Mech-Vision에서 구성된 포트 번호로 설정합니다.
-
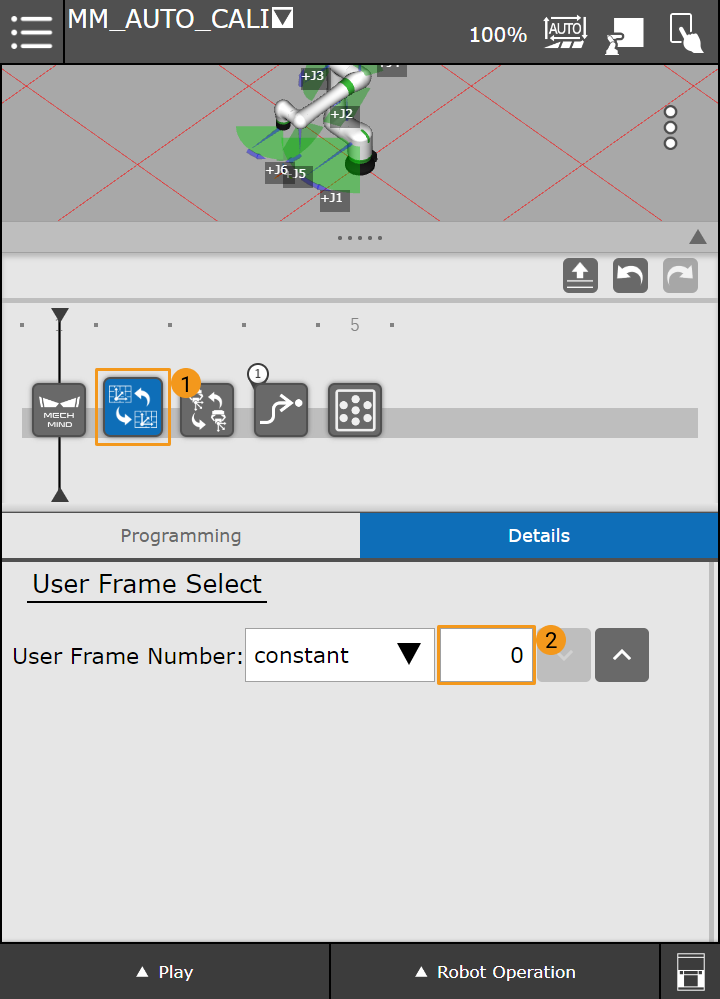
User Frame Select*를 한 번 클릭하고 *0번 사용자 좌표계(User Frame)를 선택하십시오.
-
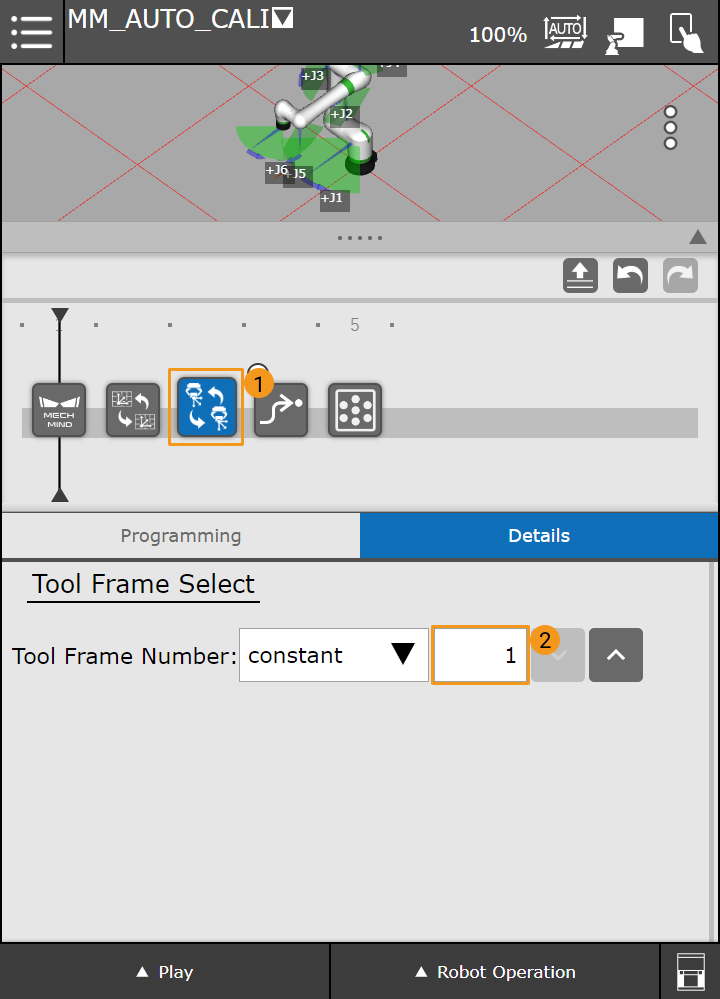
Tool Frame Select*를 한 번 클릭하고 *1번 말단장치 좌표계(Tool Frame)를 선택하십시오.
2. 티치 펜던트를 통해 캘리브레이션 시작점 설정
-
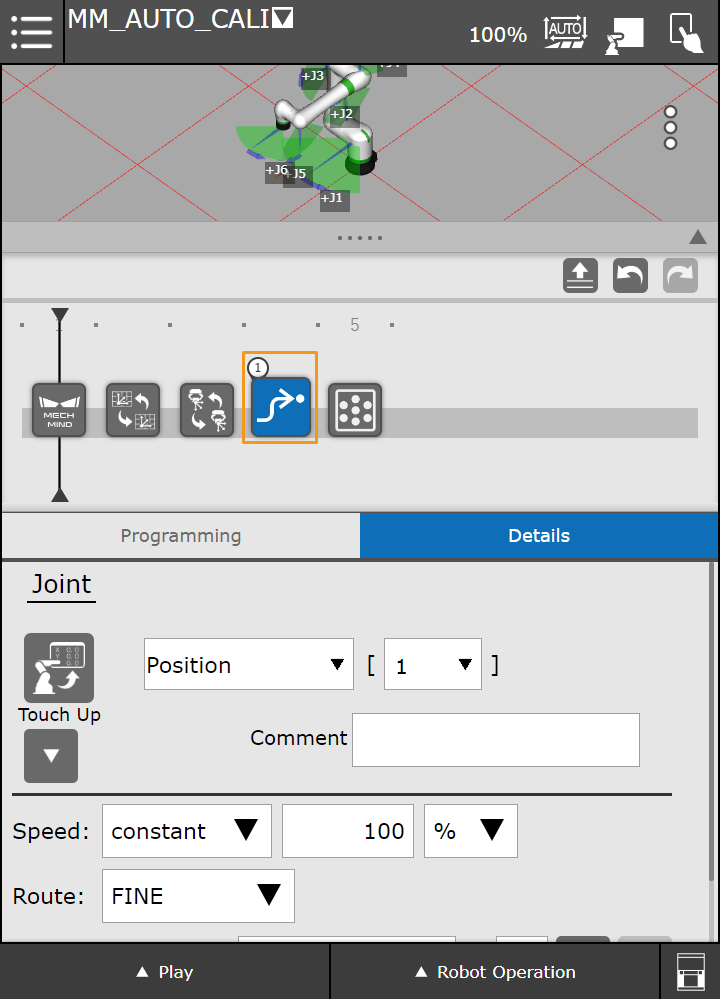
J 이동을 한 번 클릭합니다.
-
수동으로 로봇을 캘리브레이션의 시작점 위치로 이동합니다.
시작점 위치는 캘리브레이션 보드의 포인트 클라우드 품질을 확인할 때 로봇이 있는 위치로 설정할 수 있습니다.
-
Pos.Reg*를 선택하고 레지스터 번호를 입력합니다(이 샘플에서는 레지스터 100을 사용함).
 아이콘을 한 번 클릭하면 *Cart./Joint 옵션이 표시됩니다.
아이콘을 한 번 클릭하면 *Cart./Joint 옵션이 표시됩니다.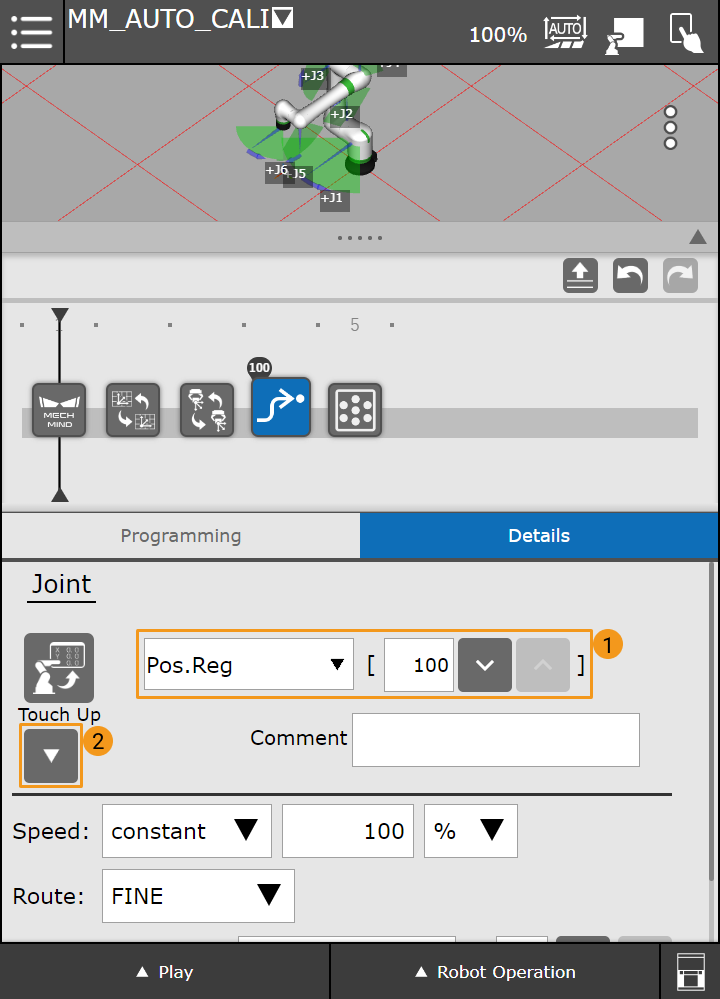
-
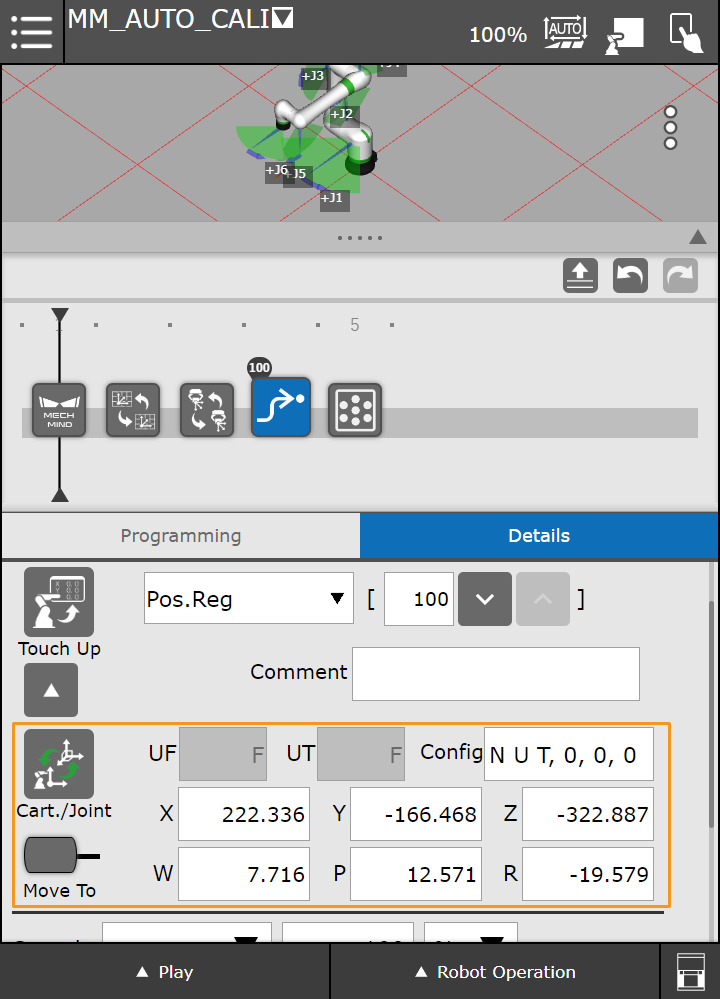
*Cart./Joint*를 한 번 클릭하고 직교 좌표계로 전환합니다.
-
*Touch Up*을 한 번 클릭하면 다이얼로그 박스가 나옵니다. OK를 한 번 클릭하여 캘리브레이션 시작점을 저장합니다.

-
-
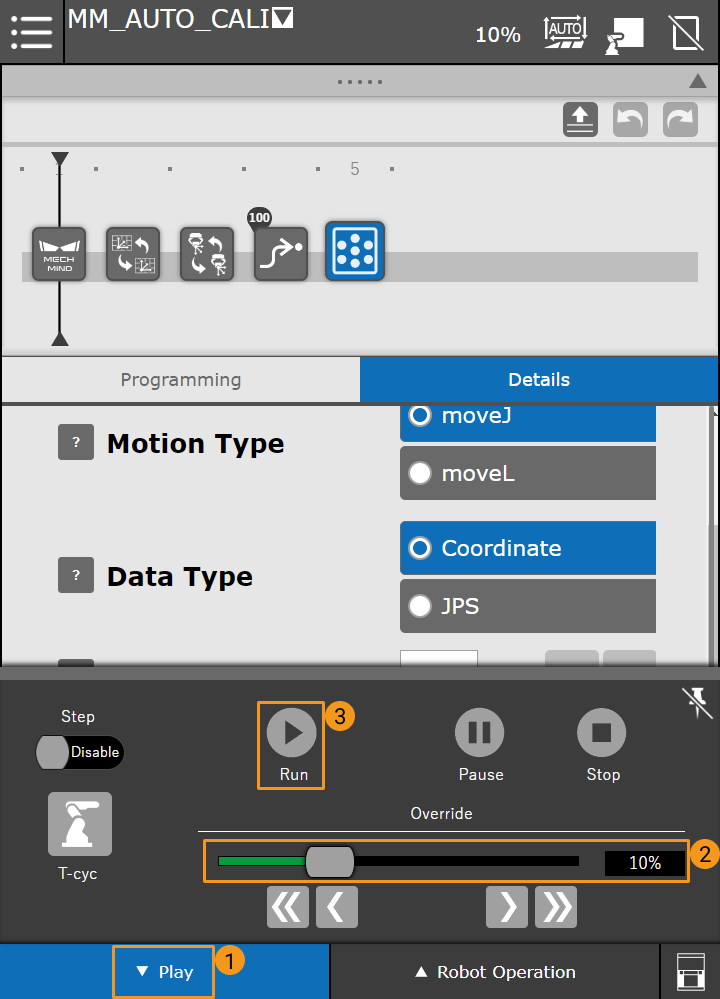
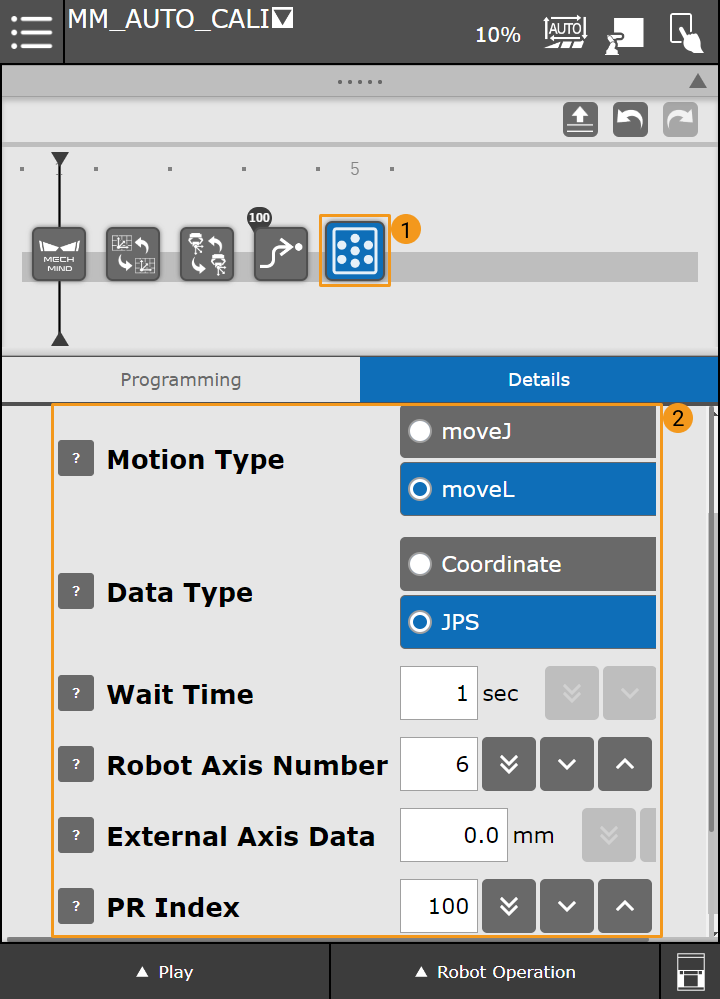
Mech-EyeCalibration를 클릭하고 아래의 그림에 따라 파라미터를 설정합니다.
-
이동 방식: 자동 캘리브레이션 프로세스에서 로봇의 이동 방식을 지정합니다.
-
데이터 유형: 로봇이 전송하는 포즈 유형입니다.
-
대기 시간: 이미지 캡처 지연 시간을 설정하여 로봇이 캘리브레이션 포인트로 이동한 후 흔들리지 않게 하도록 합니다.
-
위치 레지스터 번호: 위치 레지스터 번호를 캘리브레이션 시작점이 저장된 위치로 설정합니다.
-