Kawasaki(가와사키) 로봇 기본 조작
이 절에서는 가와사키 로봇의 기본 조작 방법을 설명합니다.
Home 포인트 설정
-
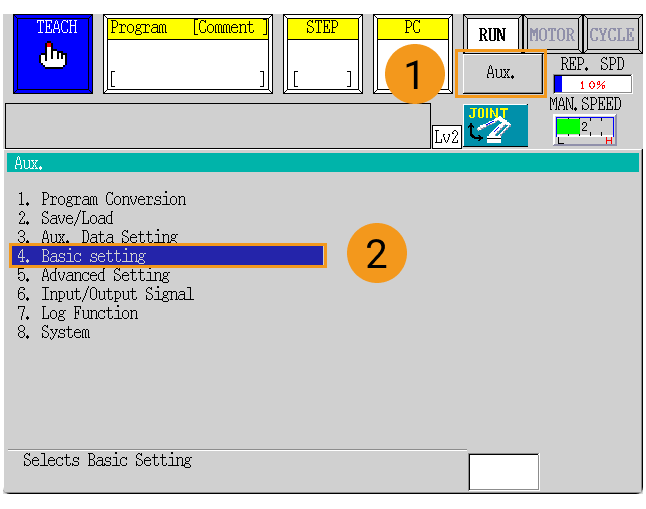
순서대로 menu: Aux.[4.Basic setting]을 클릭합니다.
-
2. Home Position.을 클릭합니다.

-
Key Entry을 선택하고 로봇 HOME 위치에 각 관절 각도를 설정한 후 `Enter`를 클릭하고 확인하면 하단에 Setting Complete 메시지가 표시됩니다.
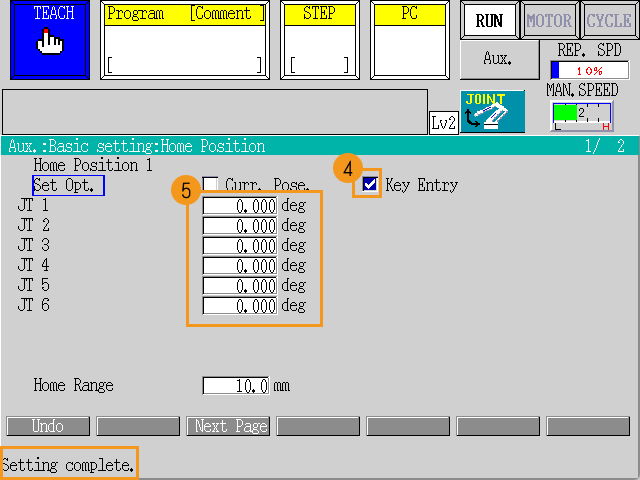
또한 사용자는 실제 로봇을 수동으로 제어하여 원하는 HOME 위치로 이동하고 Curr. Pose.를 선택한 후 Enter 키를 눌러 확인할 수 있습니다.
로봇의 TCP 설정
-
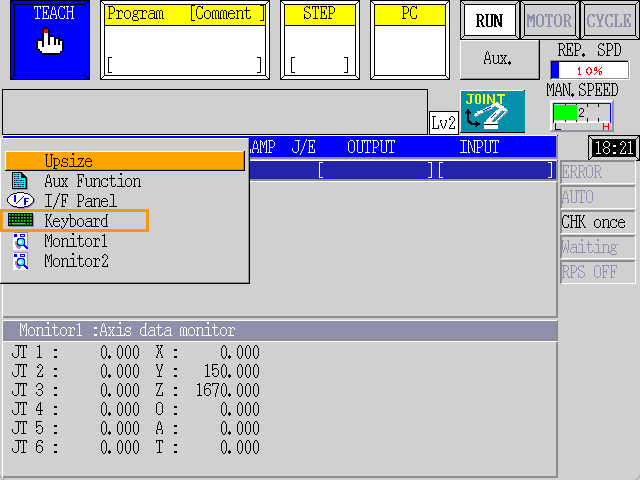
TEACH 모드에서 중안의 빈부분을 클릭합니다.
-
프롬프트된 드롭다운 리스트에서 Keyboard를 선택합니다.
-
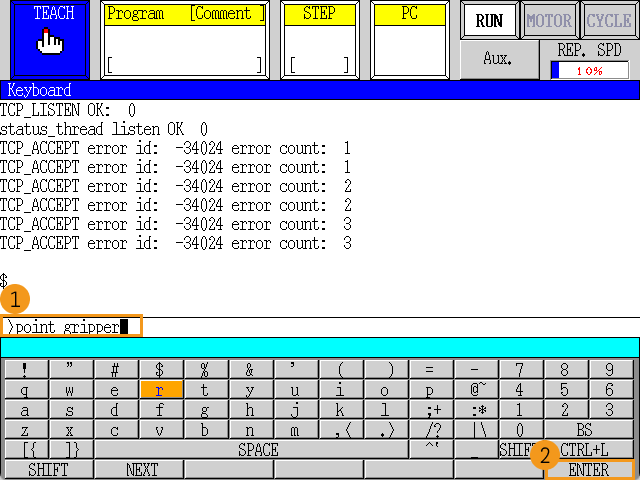
키보드를 사용하여 point gripper를 입력한 후 ENTER를 클릭합니다.
-
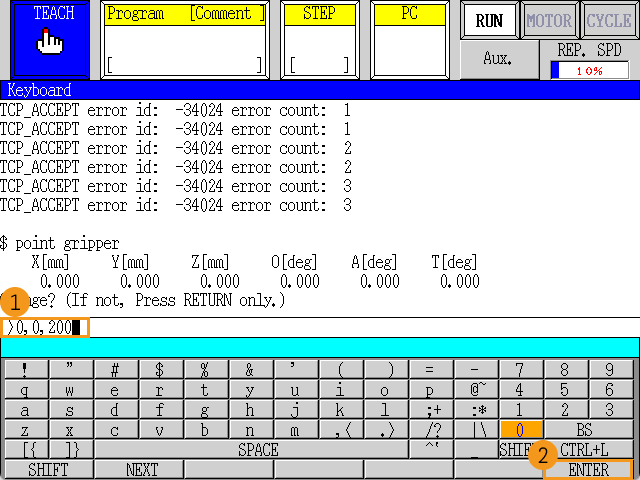
키보드를 사용하여 로봇 TCP의 포즈(예: 0,0,200 )를 입력한 후 ENTER 키를 누릅니다.
-
ENTER 키를 다시 한번 클릭하고
R키를 눌러 돌아갑니다.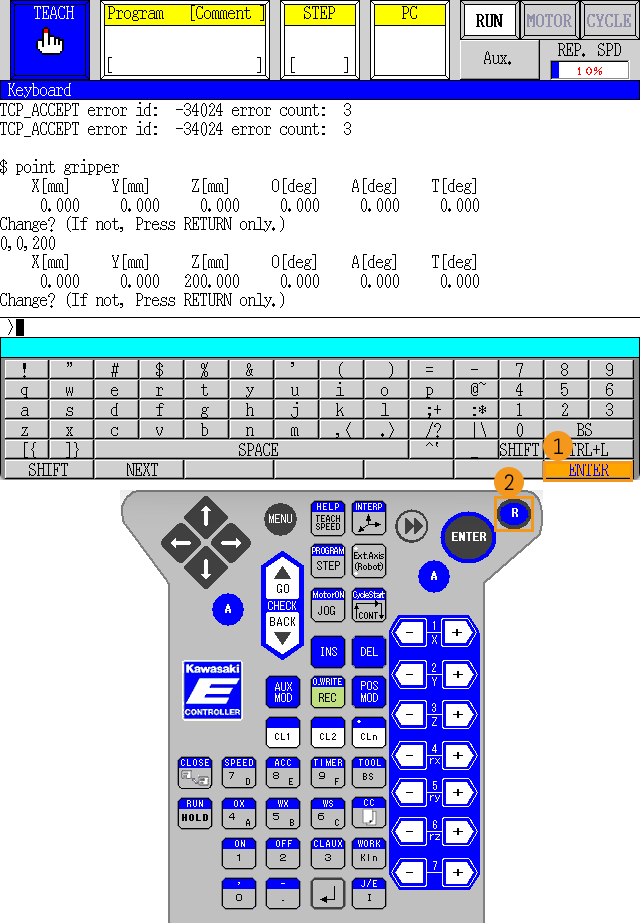
티치 포즈 데이터 설정
| 이 작업을 수행하기 전에 복제 스텝을 완료해야 합니다. |
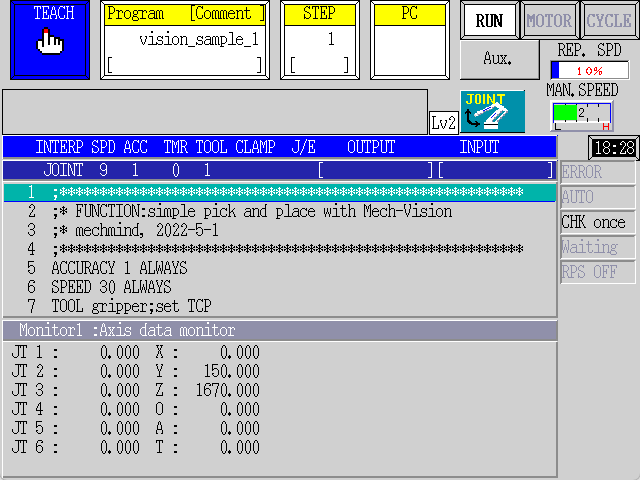
이 절에서는 Mech-Vision를 사용하여 비전 인식을 실행하여 결과를 획득하기의 샘플 프로그램 31번째 줄 `lmove waypoint[1]`을 예로 들어 티치 포즈 데이터를 설정하는 방법을 보여줍니다.
-
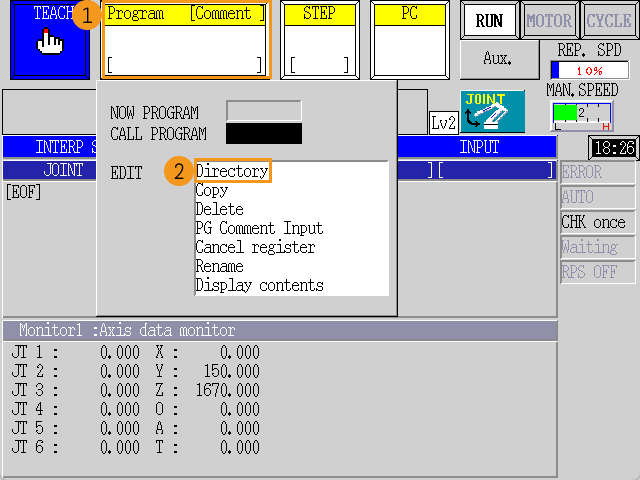
티치 모드에서 Program 창을 클릭한 후 Directory를 클릭합니다.
-
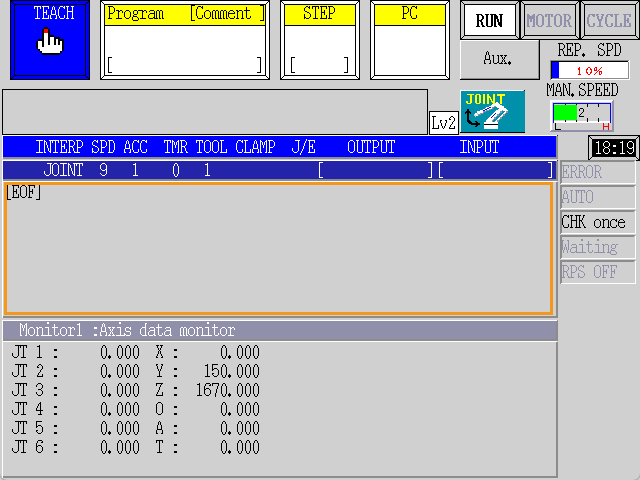
Directory에서 Next Page를 사용하여 vision_sample_1을 선택한 후 티치 펜던트에서 `ENTER`키를 누릅니다.
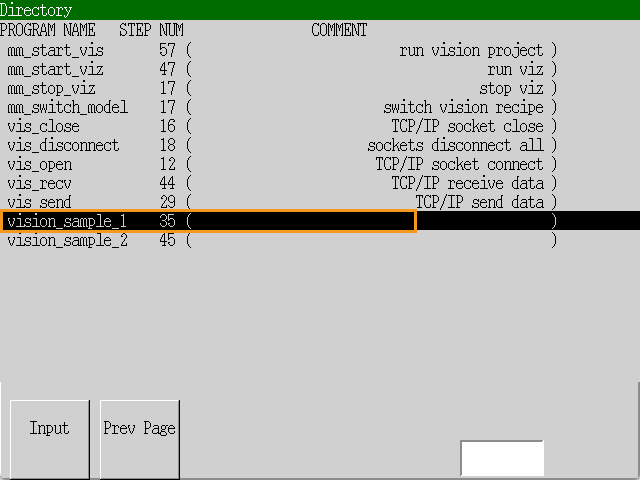
다음 그림과 같이 포그라운드 프로그램이 추가됩니다.
-
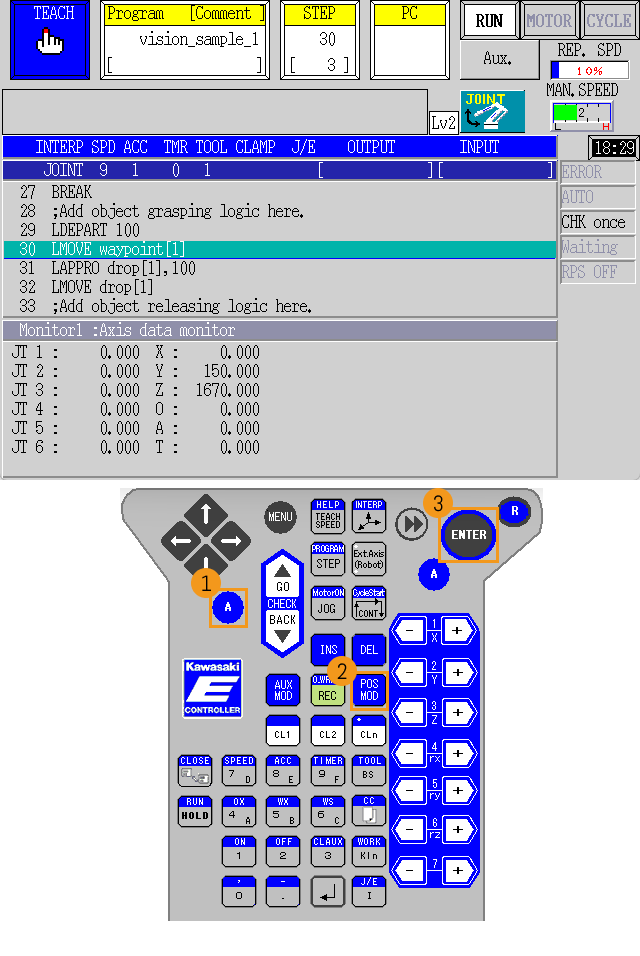
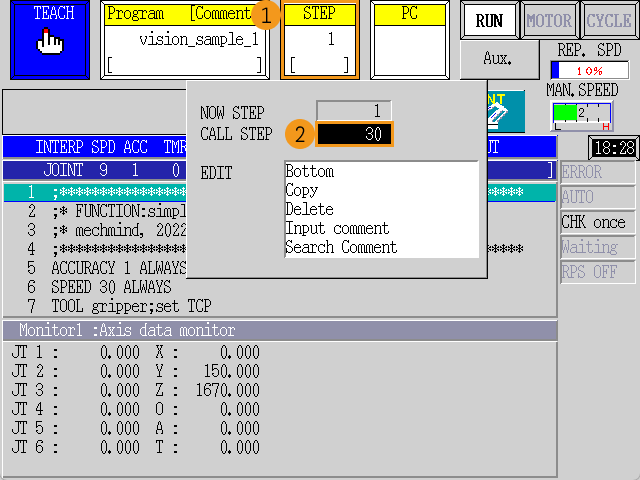
STEP을 클릭하고 CALL STEP에서 키보드를 사용하여 30을 입력합니다. `ENTER`키를 눌러 확인하여 30번째 줄이 반짝이며 강조되는 상태가 됩니다.
-
실제 로봇을 학습된 위치로 수동으로 이동시키고
A+POS MOD키를 누른 후ENTER키를 눌러 확인합니다. 이때 티칭 된 위치의 포즈 데이터가 waypoint[1]의 값입니다.