부록
Mech-Viz을 사용하여 충돌 감지
Mech-Vision 및 Mech-Viz 소프트웨어 설치 디렉터리의 Communication Component/tool/viz_project/check_collision 파일의 check_collision.viz 프로젝트와 함께 사용하려면 다음 사항에 주의하십시오.
-
check_collision 프로젝트는 예시 프로젝트일 뿐이며, 프로젝트에 이동 태스크와 관련된 스텝을 제외하고는 다 필요하며 해당 프로젝트의 상대 위치를 삭제하거나 변경할 수 없습니다. 로봇 모델 중 실제 사용하는 모델을 선택하십시오.
-
실제 상황에 따라 이동 태스크와 관련된 스텝을 추가하거나 삭제할 수 있습니다. 보낸 포즈 수는 이동 태스크와 관련된 스텝 수와 일치합니다.
-
Home 위치가 필요한 경우 로봇 측에서 카메라 트리거 명령을 호출하기 전에 포즈 설정 명령을 한 번 호출할 수 있습니다.
Mech-Viz의 진공 그리퍼 파티션 기능 사용
Mech-Vision 및 Mech-Viz 소프트웨어 설치 디렉터리의 Communication Component/tool/viz_project/suction_zone 폴더의 suction_zone.viz 프로젝트와 함께 사용하려면 다음 사항에 주의하십시오.
-
suction_zone.viz 프로젝트는 샘플 프로젝트로, 프로젝트에 이동 태스크와 관련된 스텝을 제외하고는 다 필요하며, 해당 프로젝트의 상대 위치를 삭제하거나 변경할 수 없습니다. 로봇 모델 중 실제 사용하는 모델을 선택하십시오.
-
실제 상황에 따라 이동 태스크와 관련된 스텝을 추가하거나 삭제할 수 있습니다. 보낸 포즈 수는 이동 태스크와 관련된 스텝 수와 일치합니다.
-
Home 위치가 필요한 경우 로봇 측에서 카메라 트리거 명령을 호출하기 전에 포즈 설정 명령을 한 번 호출할 수 있습니다.
-
사용하기 전에 빨판 파일을 구성해야 합니다.
-
로봇 측에서는 카메라 트리거 명령을 먼저 호출한 다음 DO 신호 리스트 획득하기 명령을 호출해야 합니다.
물체 레이블 식별 기능 보내기
로봇에 보내는 레이블 필드는 레이블 코드(정수로 표시)입니다. Mech-Vision 프로젝트에서 레이블 매핑을 설정해야 합니다.

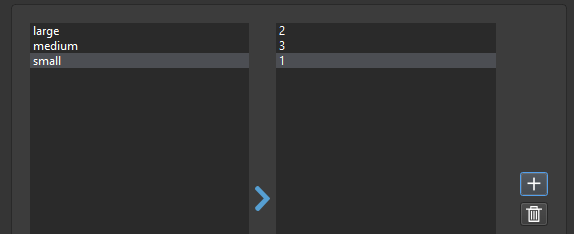
레이블 매핑 파일의 형식은 다음과 같습니다.
{
"large": "2",
"medium": "3",
"small": "1"
}-
large, small, medium은 레이블 문자열입니다.
-
2, 3, 1은 레이블 코드입니다.
카메라 노출 추가 완료
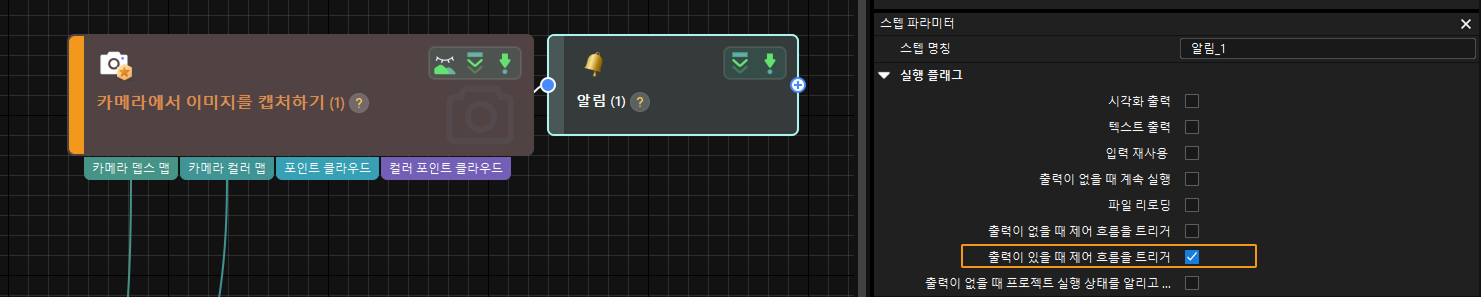
PROFINET와 EtherNet/IP 프로토콜의 표준 인터페이스는 주로 시스템 사이클 타임을 최적화하는 데 사용되는 카메라 노출 완료 신호를 제공합니다. Mech-Vision 프로젝트의 작업 시간이 길어지면 로봇은 카메라 노출이 완료된 후 즉시 위치를 이동해야 합니다. 카메라 노출 완료 신호를 생성하려면 Mech-Vision 프로젝트에 몇가지 설정이 필요합니다.
-
Mech-Vision 프로젝트에 “알림” 스텝을 추가하고 “카메라에서 이미지를 캡처하기” 스텝의 제어 흐름에 연결합니다. “카메라에서 이미지를 캡처하기” 스텝의 를 선택합니다.
-
“알림” 스텝의 서비스 이름을 Standard Interface Notify 로, 메시지 내용을 1001 (1001의 메시지 내용은 변경할 수 없음)로 설정합니다.

-
Mech-Vision 프로젝트를 실행하여 카메라 노출이 완료될 때 PLC/로봇 측에서 Exposure_Complete 신호를 수신합니다. Exposure_Complete 신호를 수신한 후 Reset_Exposure 신호를 사용하여 Exposure_Complet 신호를 재설정하십시오. 시스템이 10초 내에 재설정 신호를 수신하지 못하면 데이터 확인 신호 타임아웃 의 오류 메시지가 나타납니다.