Adapter 퀵 가이드
Adapter에 관한 소개
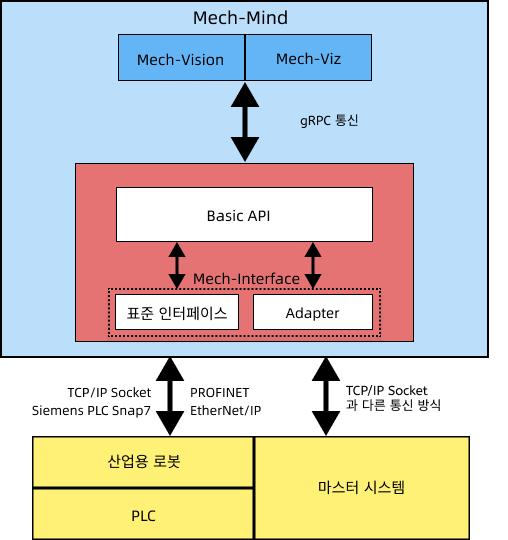
Adapter는 Mech-Vision 및 Mech-Viz 소프트웨어의 통신 컴포넌트로, Basic API 인터페이스를 통해 Mech-Vision 및 Mech-Viz와 gRPC 통신을 수행하고, TCP/IP Socket, HTTP, PLC 데이터 블록 전송 프로토콜(예: 미쓰비시 PLC MC 프로토콜) 등 일반적인 산업 통신 방식으로 외부 장치와 통신합니다.
Adapter 기능
Adapter를 통해 다음과 같은 기능을 구현할 수 있습니다:
-
비전 시스템 내부에서 Mech-Vision 및 Mech-Viz 소프트웨어를 제어할 수 있습니다
유형 기능 Mech-Vision에 관하여
Mech-Vision을 실행하여 비전 결과 가져오기
Mech-Vision 스텝 파라미터를 설정하기
Mech-Vision 스텝 파라미터를 읽어내기
Mech-Vision 파라미터 레시피를 전환하기
Mech-Viz에 관하여
Mech-Viz를 실행하기
Mech-Viz를 종료하기
Mech-Viz 스텝 파라미터를 설정하기
Mech-Viz 스텝 파라미터를 읽어내기
말단장치 번호를 설정하기
로봇의 실행 속도를 설정하기
포인트 클라우드의 충돌 파라미터를 설정하기
Mech-Viz의 실행 상태를 가져와 반환하기
-
비전 시스템 외부에서 사용자 인터페이스, 데이터베이스, 파일 읽기 및 쓰기, Web 시스템과의 통신 등 비전 이외의 기능을 구현할 수 있습니다
외부 기능은 Python 프로그래밍을 통해 구현해야 합니다.
Adapter 개발
Mech-Vision에서는 Adapter 생성기 기능을 제공하여 Adapter를 처음 사용하는 사용자가 빠르게 Adapter 프로그램을 생성하고 Adapter 프로젝트를 구축할 수 있도록 도와줍니다. Adapter 생성기의 소개와 사용법은 <어댑터(Adapter) 생성기 매뉴얼> 내용을 참조하십시오.
사용자는 생성된 Adapter를 기반으로 프로그램을 2차 개발할 수도 있고, 처음부터 완전한 Adapter 프로그램을 작성할 수도 있습니다.
Adapter 프로젝트 배포
Adapter 프로그램을 작성한 다음에 다음 단계를 참조하여 Adapter 프로젝트를 배포할 수 있습니다:
-
Mech-Vision 툴바에서 로봇 통신 구성을 클릭합니다.
-
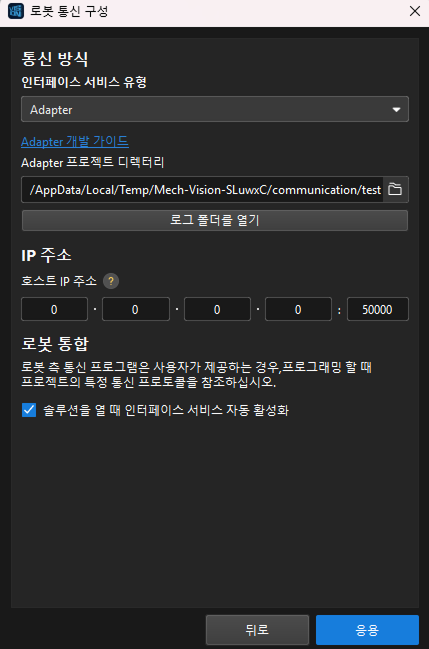
로봇 통신 구성 창에서 다음 구성을 수행합니다.
-
로봇을 선택하고 다음을 클릭합니다.
-
*인터페이스 서비스 유형*에서 *Adapter*를 선택합니다.
-
*Adapter 프로젝트 폴더*에서
 를 클릭합니다. 팝업된 파일 브라우저에서 Adapter 프로젝트 폴더를 선택합니다.
를 클릭합니다. 팝업된 파일 브라우저에서 Adapter 프로젝트 폴더를 선택합니다. -
(선택 사항) *솔루션을 열 때 인터페이스 서비스 자동 활성화*를 선택하는 것이 좋습니다.
-
적용을 클릭합니다.
-
-
Mech-Vision 메인 화면에서 툴바에 있는 “인터페이스 서비스” 기능이 활성화되어 있는지 확인합니다.
이로써 Adapter 프로젝트가 성공적으로 배포되었습니다.
Adapter에 대해 간단하게 알아본 후 <어댑터(Adapter) 생성기 매뉴얼> 내용을 참조하여 첫 번째 Adapter 프로그램을 생성하십시오.