AUBO (ARCS) 표준 인터페이스 통신 구성
Mech-Mind 비전 시스템과 AUBO (ARCS) 로봇은 플러그인 형식으로 표준 인터페이스 통신을 수행할 수 있습니다. 이 절에서는 플러그인을 AUBO (ARCS) 로봇에 가져오는 방법과 비전 시스템과 로봇 간의 표준 인터페이스 통신 구성을 완료하는 방법을 설명합니다.
하드웨어 및 소프트웨어 버전 확인하기
-
AUBO 로봇의 제어 시스템이 ARCS인지 확인하십시오.
-
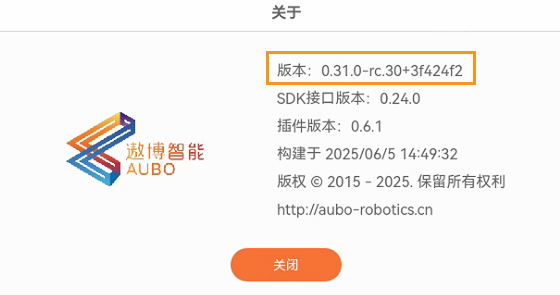
티치 펜던트 버전이 0.31.0-rc.30인지 확인하십시오.
클릭하여 방법을 확인하십시오
-
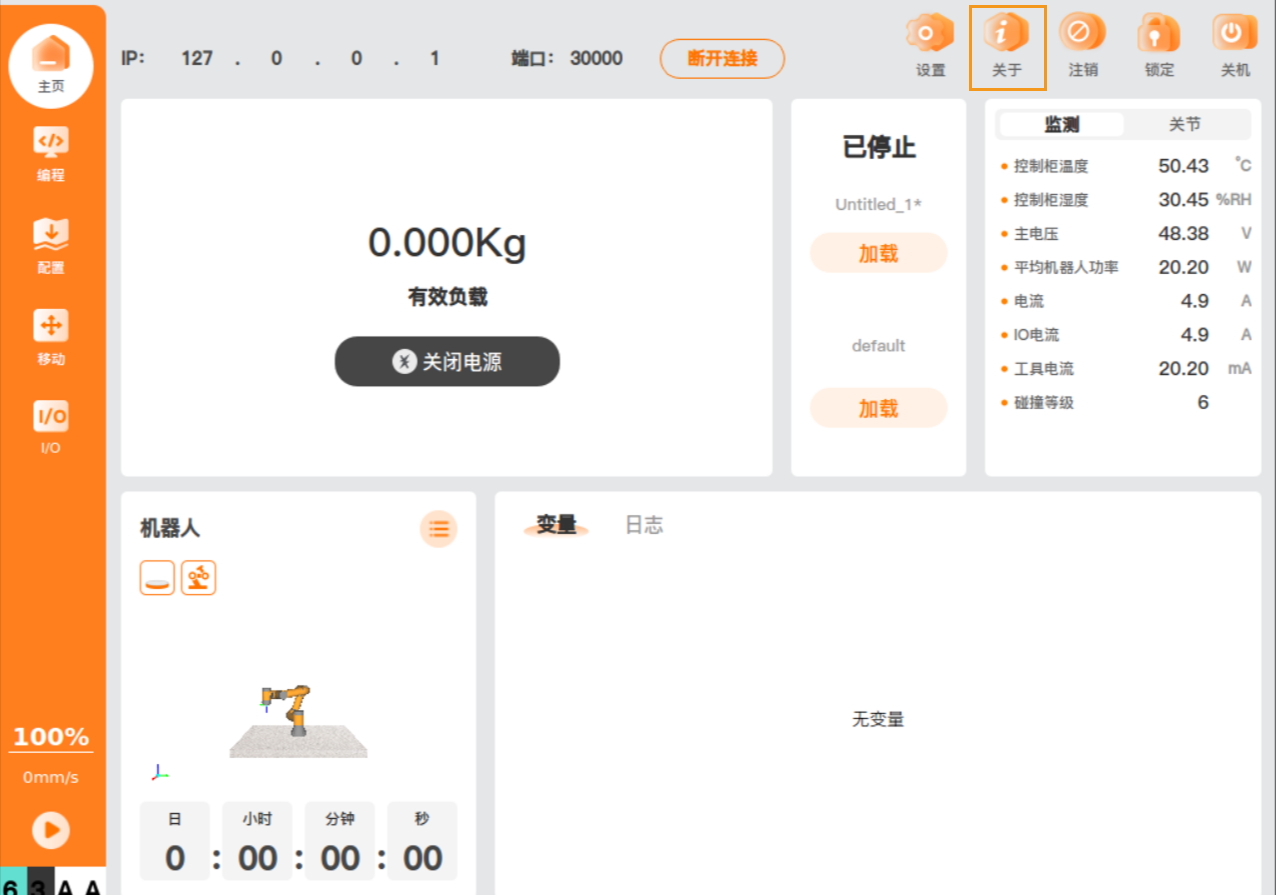
티치 펜던트의 홈 화면에서 정보를 클릭하면 티치 펜던트 버전을 확인할 수 있습니다.
-
| 표준 인터페이스 플러그인은 태블릿으로 컨트롤러에 직접 연결하여 통신하는 방식을 지원하지 않습니다. 태블릿으로 통신해야 하는 경우, 태블릿에 RealVNC 소프트웨어를 설치하고 원격 방식으로 컨트롤러에 연결해야 표준 인터페이스 플러그인을 정상적으로 사용할 수 있습니다. |
네트워크 연결 설정하기
IP 주소 설정하기
-
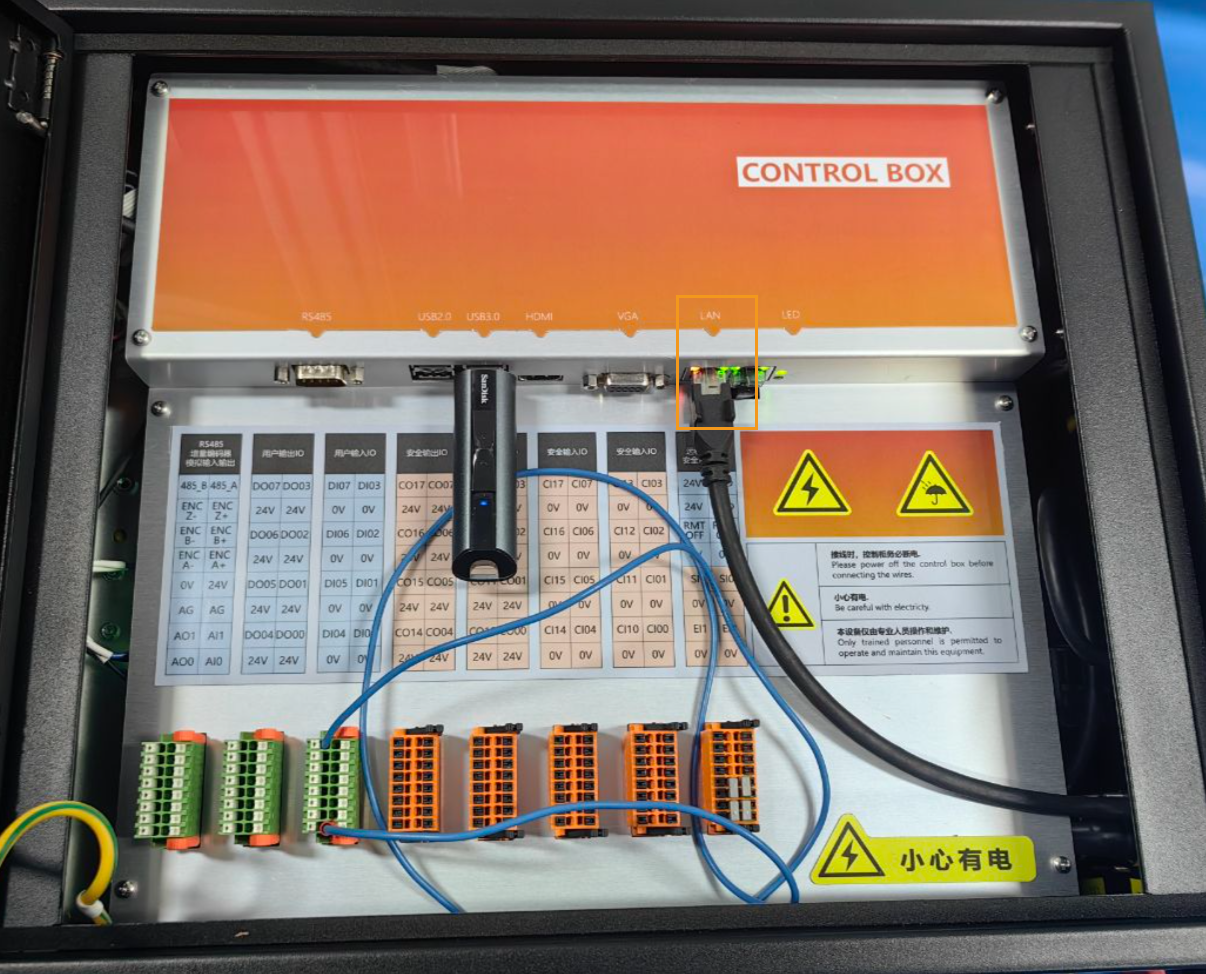
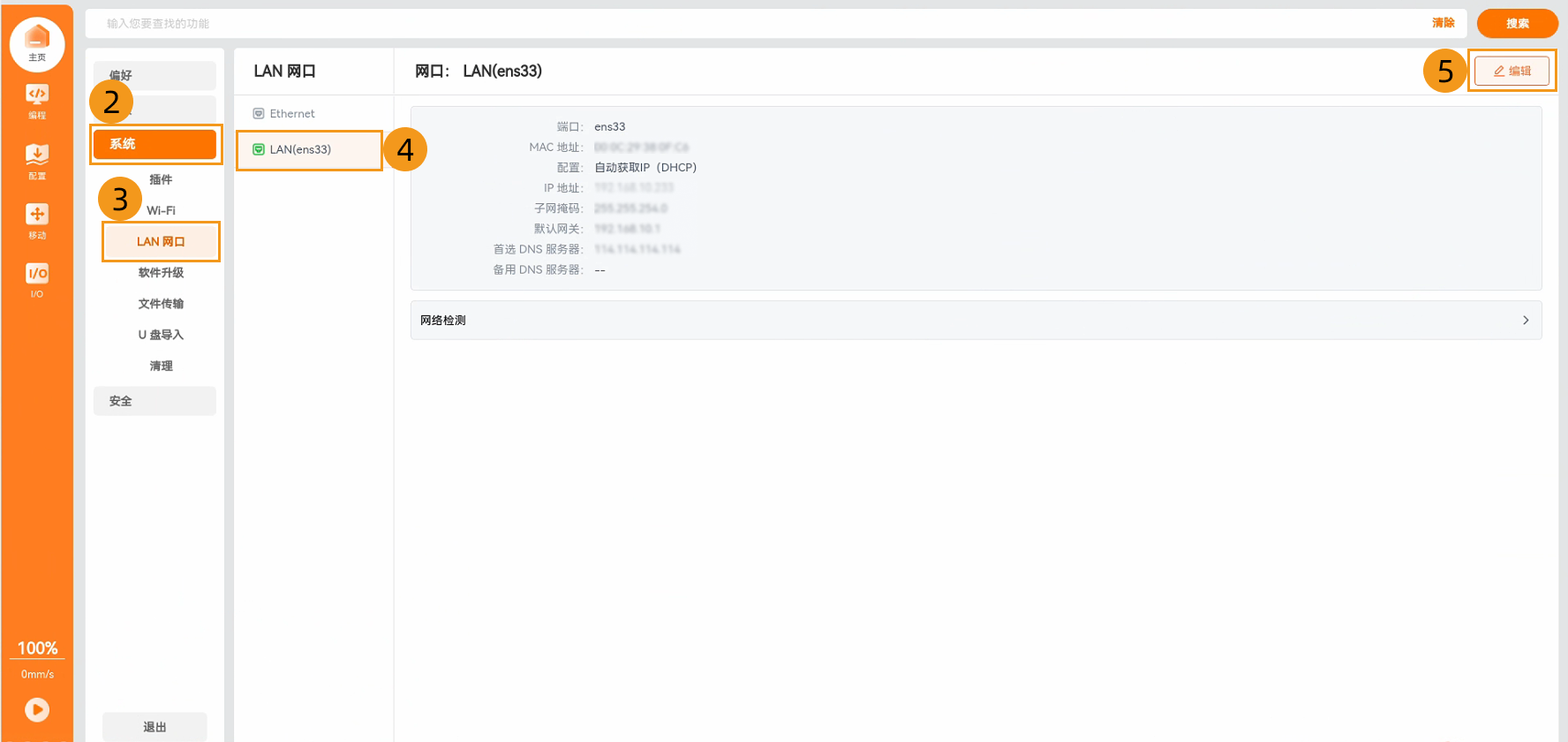
티치 펜던트의 홈 화면에서 순서대로 을 클릭하고, 실제 네트워크 환경에 따라 로봇의 IP 주소를 설정합니다. 설정을 완료한 후 적용을 클릭합니다.

-
IPC에서 IP 주소를 설정합니다.
IPC의 IP 주소와 로봇의 IP 주소는 동일한 네트워크 세그먼트에 있어야 합니다. 즉, 두 IP 주소의 네트워크 부분과 서브넷 마스크가 동일해야 합니다. 예를 들어, 192.168.100.169/255.255.255.0 및 192.168.100.170/255.255.255.0은 동일한 네트워크 세그먼트에 있습니다.
오일러 각의 유형을 설정하기
-
Mech-Viz를 시작하여 새로운 빈 프로젝트 버튼을 클릭합니다. 팝업된 화면에서 온라인 로봇 모델 목록 가져오기를 클릭하고, 로봇 브랜드에서 AUBO를 선택합니다. 오른쪽 패널에서 구체적인 로봇 모델을 선택합니다.
-
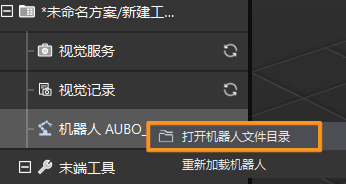
Mech-Viz 소프트웨어의 왼쪽 패널에서 로봇을 마우스 오른쪽 버튼으로 클릭한 다음 로봇 파일 디렉터리 열기를 선택합니다.
-
위로 두 단계 상위 디렉터리로 이동하여
Robot Library 2.0디렉터리로 갑니다.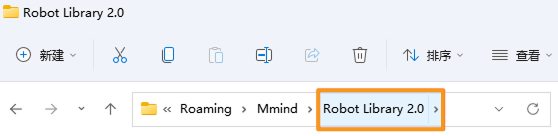
-
편집기로
robot_euler_angles_convention.json파일을 열고, 아래 코드를 추가한 후 저장하고 파일을 닫습니다."AUBO": { "euler_angles_convention": "XYZ_S_w,p,r" }, -
편집기로
default_robot_communication_settings.json파일을 열고, 아래 코드를 추가한 후 저장하고 파일을 닫습니다."AUBO": { "is_enable_interface": true, "is_interface_needed": true, "interface_format": "ASCII", "interface_name": "TCP Server" }, -
Mech-Viz 소프트웨어를 종료합니다.
"로봇 통신 구성" 설정
-
Mech-Vision 소프트웨어를 시작합니다. 표시되는 인터페이스에 따라 다음의 적절한 방법을 선택하여 솔루션을 생성하십시오.
-
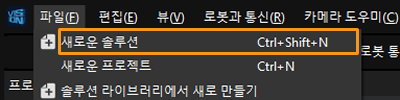
시작 화면이 나타나면 새로운 솔루션 만들기를 클릭하여 새로운 솔루션을 만듭니다.

-
메인 인터페이스가 나타나면 메뉴 바에서 을 차례로 클릭하여 새로운 솔루션을 만듭니다.
-
-
Mech-Vision 툴 바에서 로봇 통신 구성을 클릭합니다.
-
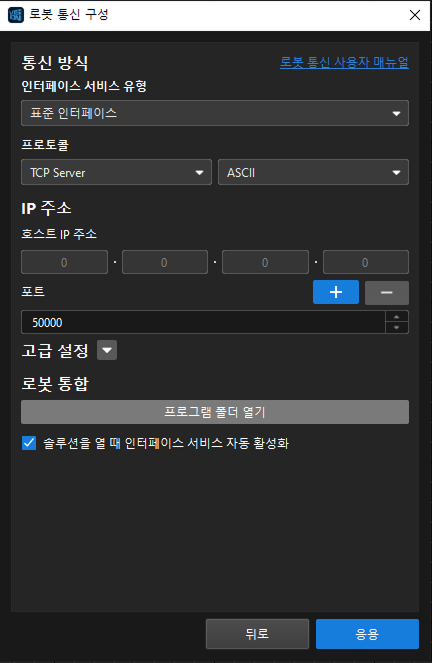
로봇 통신 구성 창에서 다음 구성을 수행합니다.
-
로봇 선택 드롭다운 메뉴를 클릭하고 *목록에 있는 로봇*을 선택한 다음 로봇 모델 선택을 클릭하여 로봇 모델을 선택합니다. 그다음 다음을 클릭합니다.
-
통신 방식 화면에서 인터페이스 서비스 유형을 표준 인터페이스로 선택하고, 프로토콜을 TCP Server로 선택하며 프로토콜 형식을 ASCII으로 선택합니다.
-
포트 번호는 50000 이상으로 설정하는 것이 좋습니다. 설정된 포트 번호를 다른 프로그램이 사용하고 있지 않은지 확인해야 합니다.
-
(선택 사항) 솔루션을 열 때 인터페이스 서비스 자동 활성화 를 선택합니다.
-
적용을 클릭합니다.
-
-
Mech-Vision 메인 화면에서 툴 바의 "인터페이스 서비스" 기능이 활성화되어 있는지 확인하십시오.
로봇에 파일을 플래싱하기
-
IPC에서 Mech-Vision 및 Mech-Viz 소프트웨어의 설치 디렉터리로 이동한 다음,
Communication Component\Robot_Interface\Robot_Plugin\AUBO_CAP폴더로 들어가mminterface-x.x.x.zip플러그인 파일을 USB 메모리 루트 디렉터리(최상위 디렉터리)에 복사한 후, USB 메모리를 안전하게 제거합니다.-
이 문서에서는
mminterface-1.0.0.zip을 예로 사용합니다. 다른 버전의 파일 이름인 경우에도 작업 방법은 이와 유사합니다. -
로봇이 정상적으로 인식하고 읽을 수 있도록 USB 메모리는 FAT32 파일 시스템 형식을 사용하는 것을 권장합니다.
-
-
USB를 로봇 티치 펜던트의 USB 포트에 삽입합니다.
-
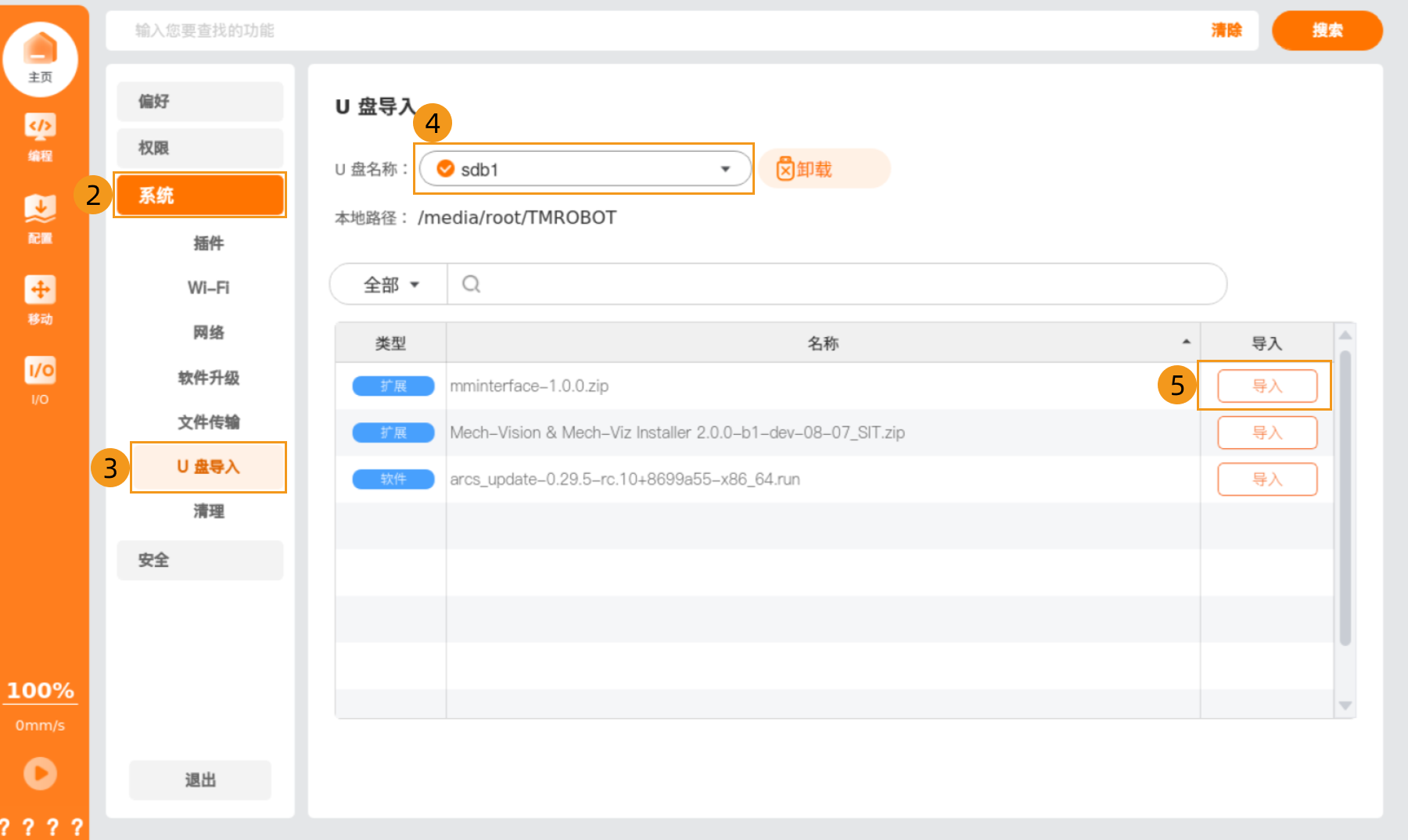
티치 펜던트의 홈 화면에서 순서대로 를 클릭하고, 사용할 USB 메모리 이름을 선택한 다음,
mminterface-x.x.x.zip파일 뒤의 가져오기를 클릭합니다.
-
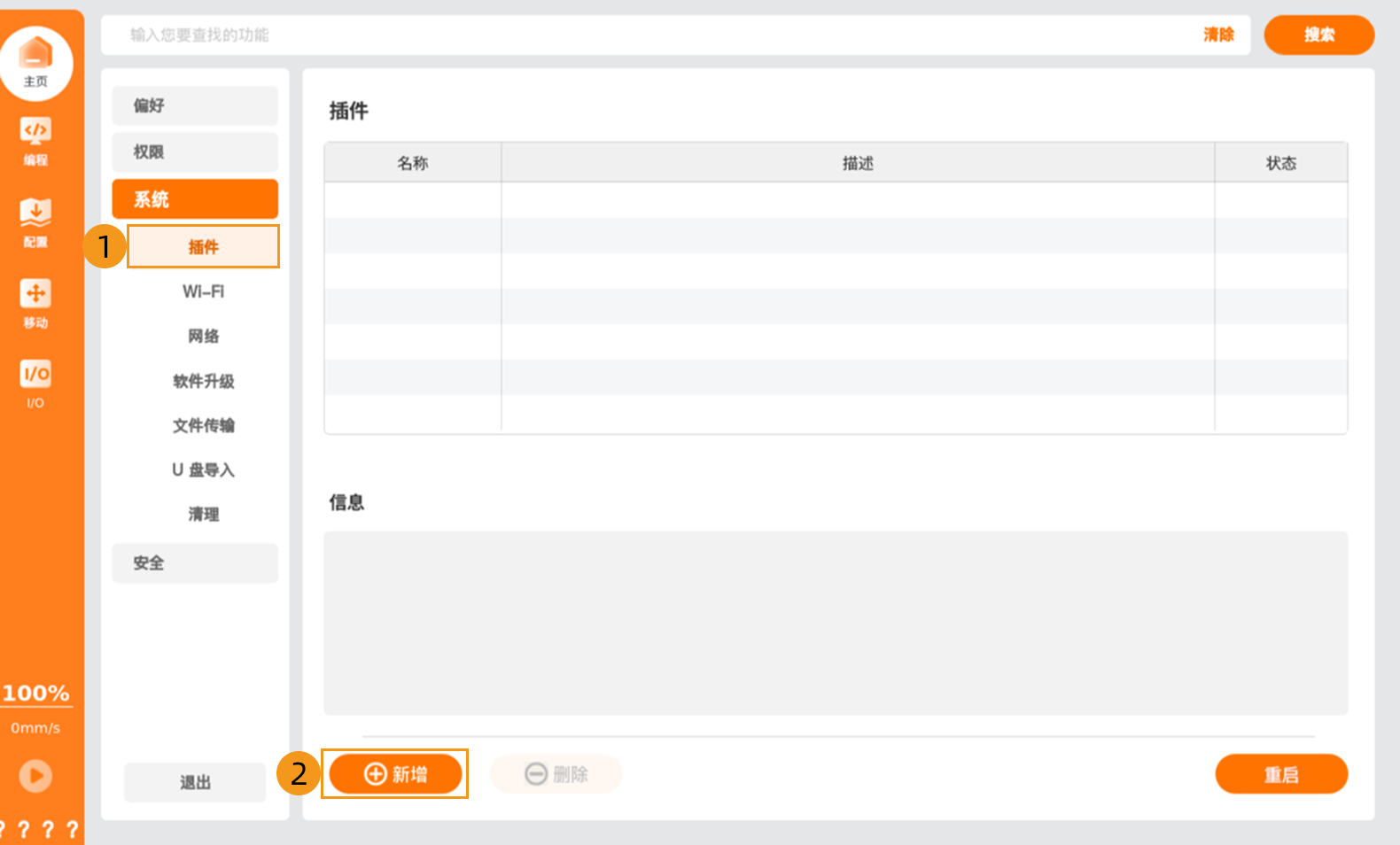
순서대로 를 클릭합니다.
-
팝업 창에서 가져온
mminterface-x.x.x.zip파일을 선택한 다음, 선택을 클릭합니다.
-
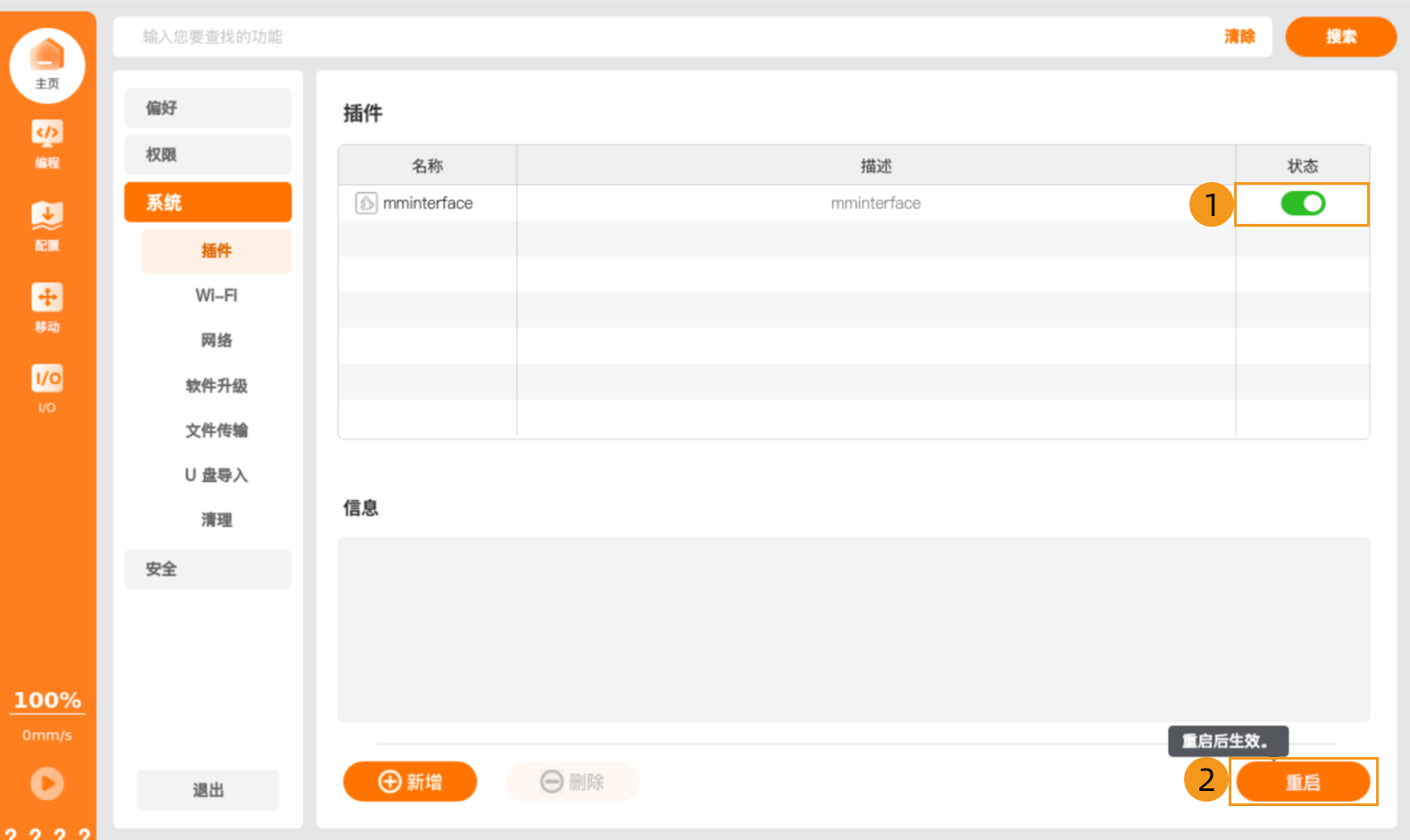
아래 화면에서 mminterface 플러그인의 상태 스위치를 켠 상태로 설정한 다음, 재시작을 클릭하여 플러그인을 적용합니다.
표준 인터페이스 통신 테스트
-
로봇의 전원이 켜져 있지 않은 경우, 티치 펜던트의 홈 화면에서 전원 켜기를 클릭합니다. 페이로드를 확인한 후, 순서대로 을 클릭합니다. 로봇의 전원이 이미 켜져 있는 경우, 이 단계를 건너뛰고 다음 단계로 진행합니다.

-
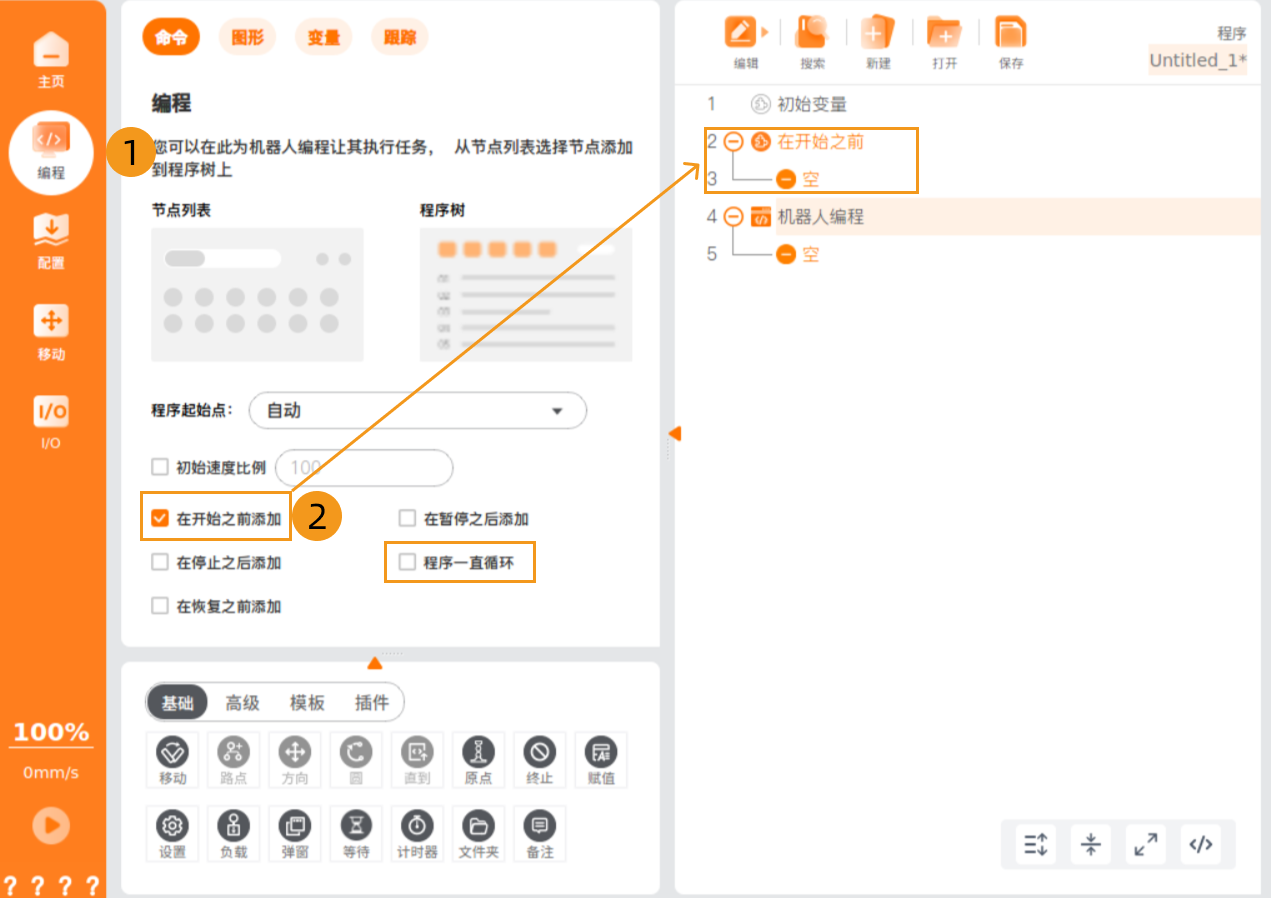
티치 펜던트 화면에서 프로그래밍을 클릭하고, 시작 전 추가를 선택한 다음 프로그램 계속 반복 선택을 해제합니다. 오른쪽 프로그램 화면에 시작 전 프로그램 구간이 표시됩니다.
-
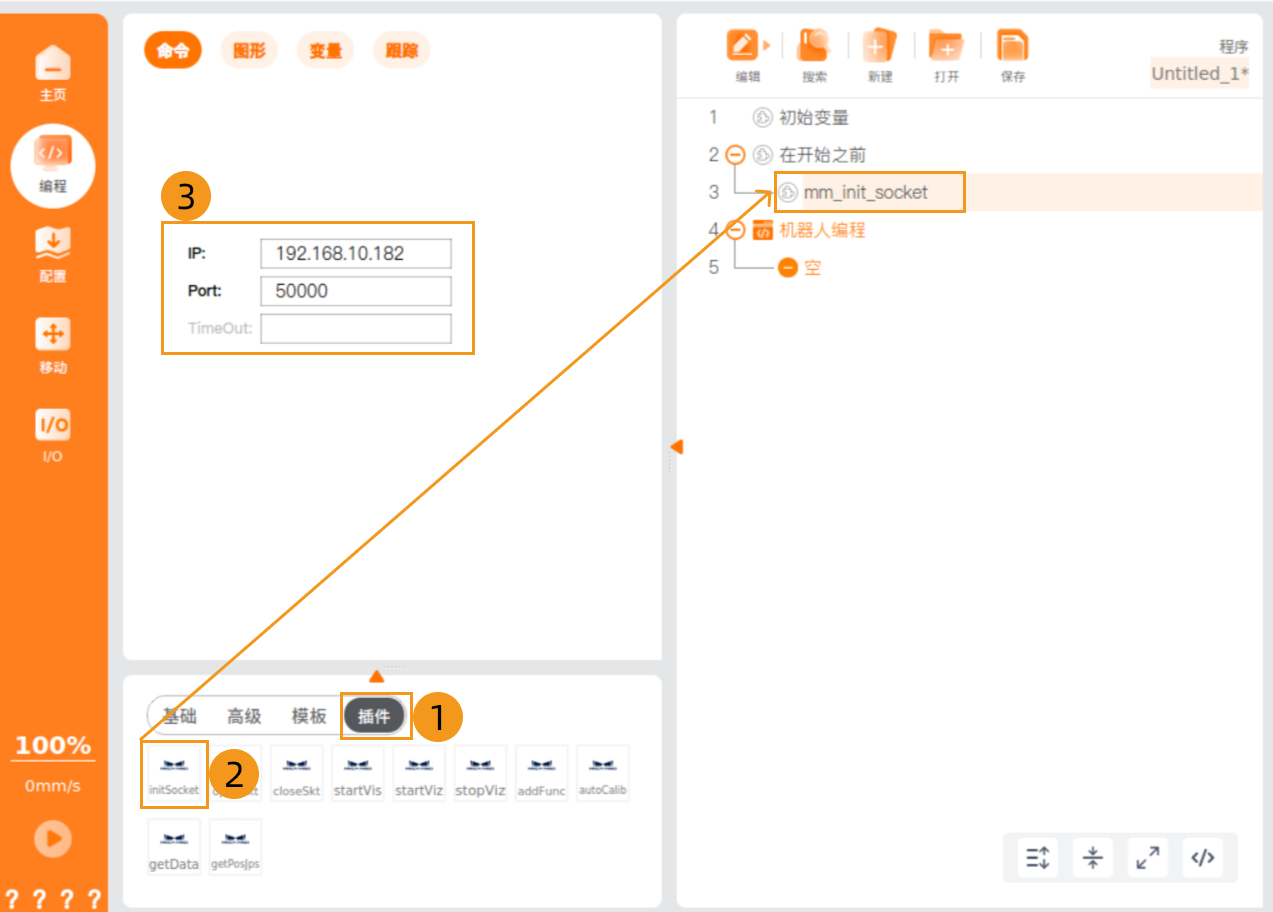
플러그인을 클릭하고, 시작 전 아래의 비어 있음을 선택한 후 initSocket을 클릭하여 mm_init_socket을 프로그램에 추가합니다. 명령 탭에서 IP 항목에는 IPC IP 주소를 입력하고, Port 항목에는 Mech-Vision 소프트웨어에서 설정한 호스트 포트 번호를 입력합니다.
-
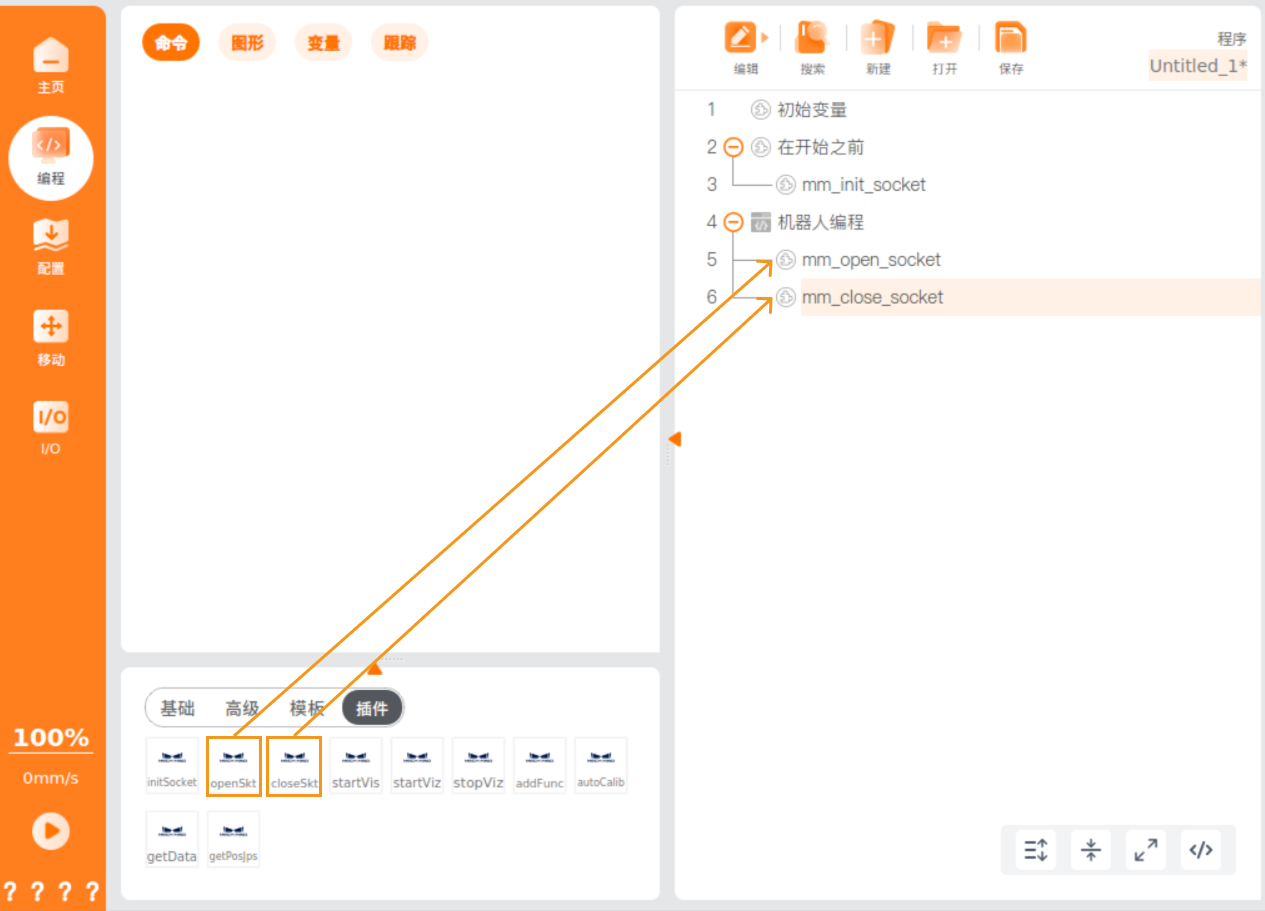
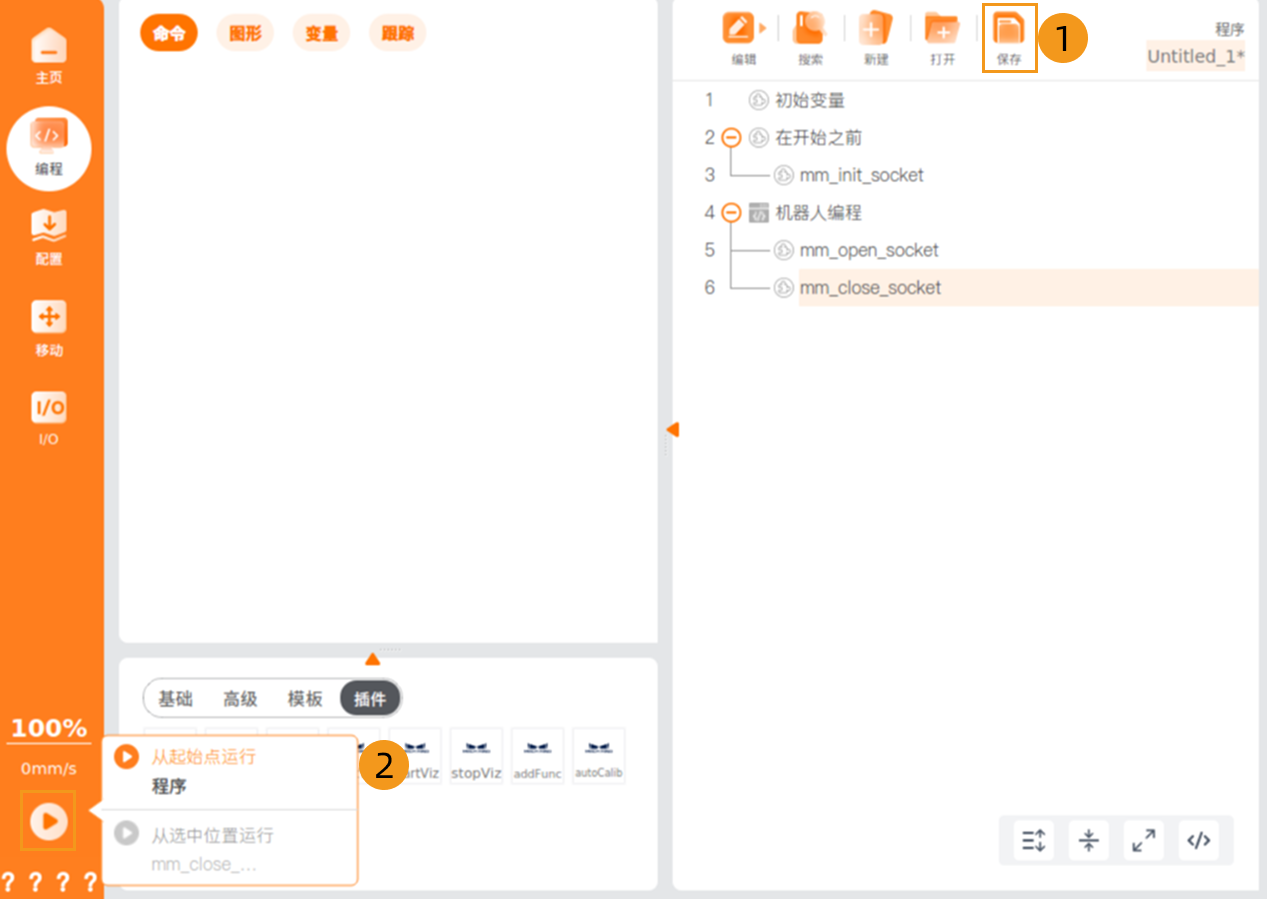
로봇 프로그래밍에서 각각 openSocket와 closeSocket을 클릭하여 mm_open_socket 와 mm_close_socket를 프로그램에 추가합니다.
-
위 프로그램을 저장한 다음, 왼쪽 아래의 실행 버튼을 클릭하고 시작점부터 실행을 선택합니다.
-
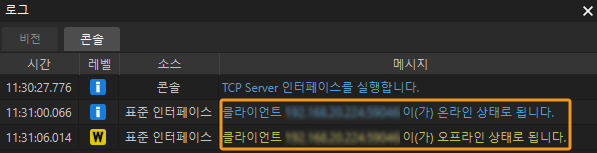
로봇과 비전 시스템 간의 통신 연결이 성공하면 Mech-Vision 로그 창의 콘솔 탭 아래에 관련 메시지가 나타납니다.