Kawasaki 자동 캘리브레이션
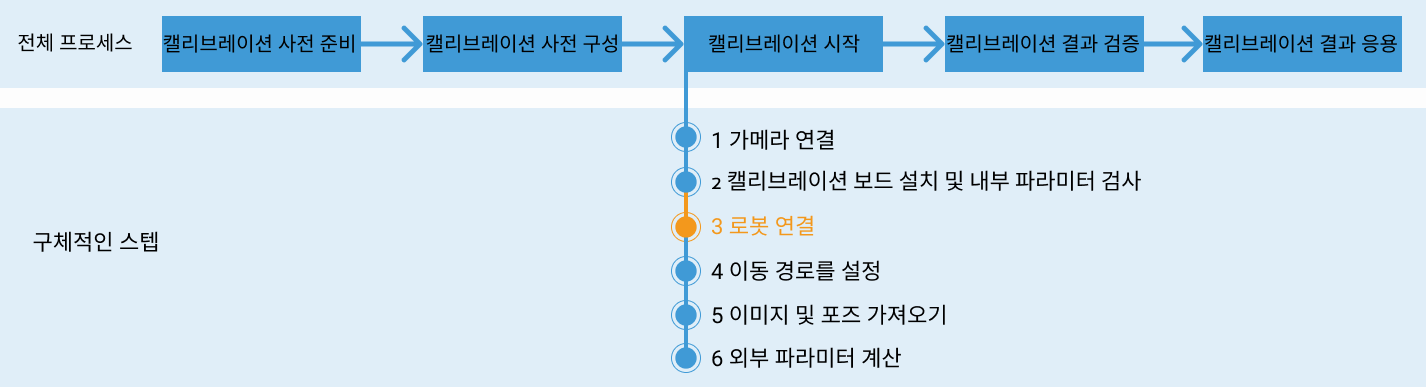
표준 인터페이스 통신을 설정한 후, 로봇을 연결하여 자동 캘리브레이션을 수행할 수 있습니다. 자동 캘리브레이션의 전체적인 프로세스는 아래 그림과 같습니다.
특별 참고 사항
캘리브레이션을 실행할 때 Mech-Vision 소프트웨어 화면의 "로봇을 연결하기" 스텝에서 로봇이 연결되기를 기다리는 중... 버튼이 나타나면 사용자는 아래 스텝에 따라 로봇 측에서 작업을 수행해야 하며, 작업 완료 후 Mech-Vision 소프트웨어에서 나머지 단계를 진행하십시오.
|
1. 캘리브레이션 프로그램 선택 및 수정
-
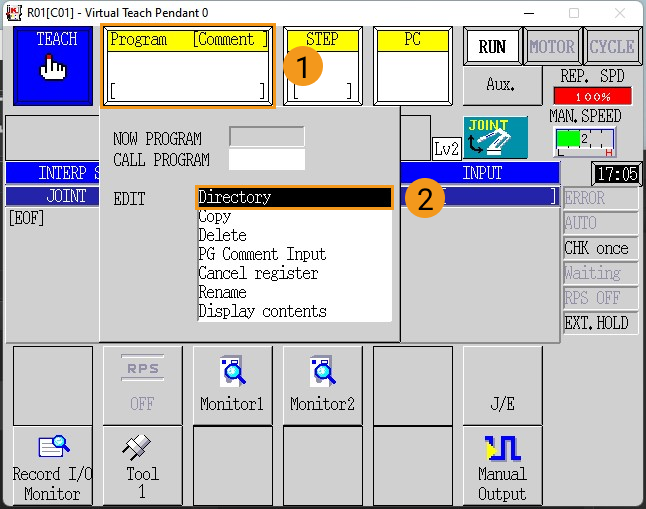
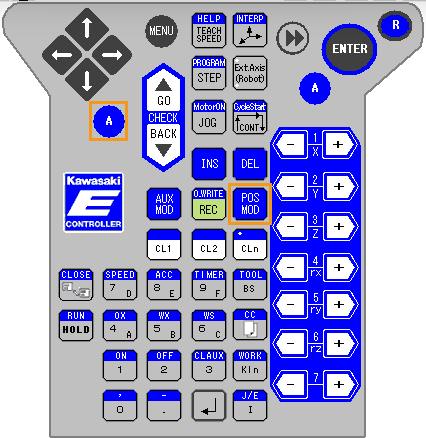
티치 펜던트 모드에서 프로그램 창을 클릭한 후 팝업 메뉴 창에서 Directory를 선택합니다.
-
Directory 리스트에서 포그라운드 프로그램 calibrate을 선택하고 티치 펜던트에서 ENTER 키를 눌러 확인합니다.
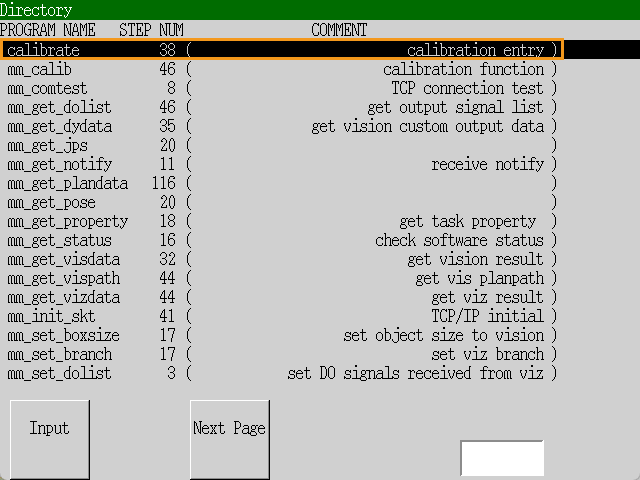
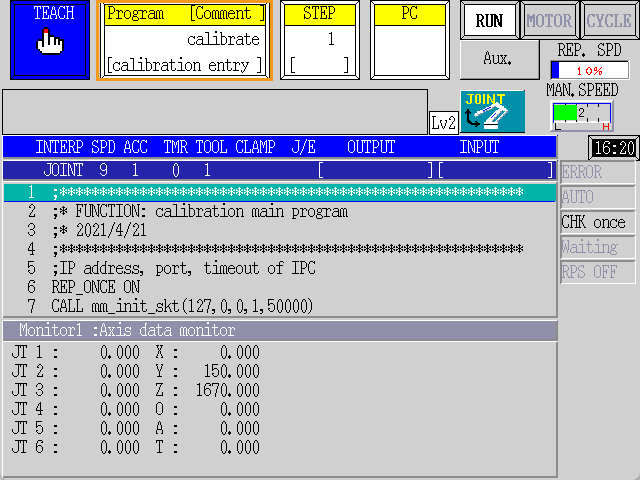
다음 그림과 같이 포그라운드 프로그램이 추가됩니다.
-
calibrate 프로그램에 있는 mm_init_skt의 파라미터를 수정합니다. 구체적인 조작 방법은 아래와 같습니다.
-
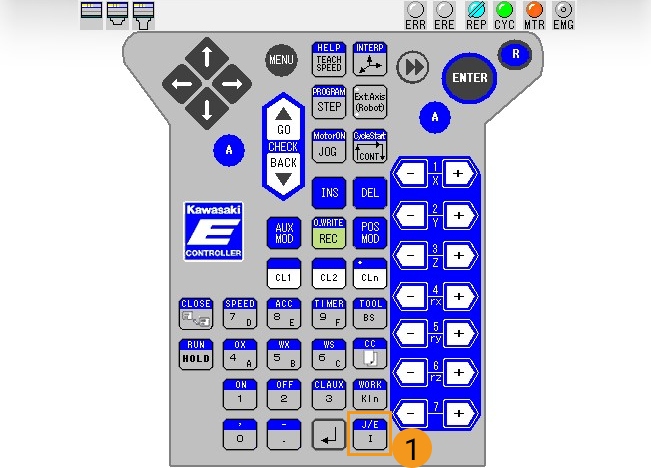
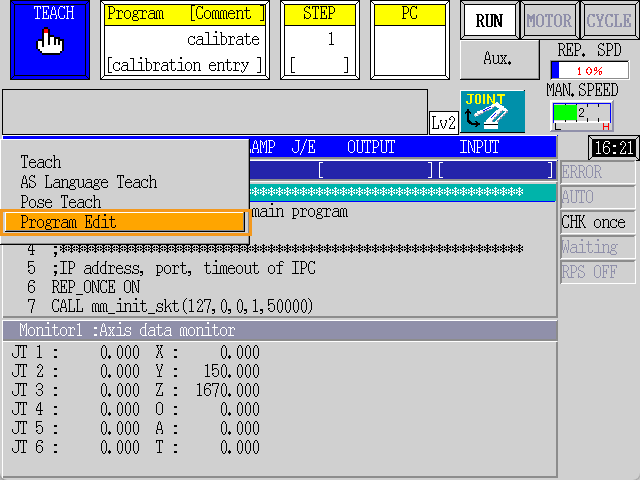
티치 펜던트에서 J/E 키를 누르고 팝업 메뉴에서 Program Edit을 선택한 후 ENTER 키를 누릅니다.
-
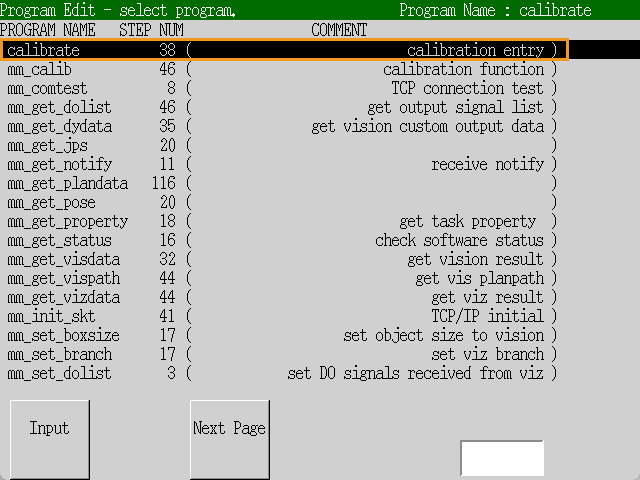
program directory에서 calibrate을 선택하고 티치 펜던트에서 ENTER 키를 눌러 확인합니다.
-
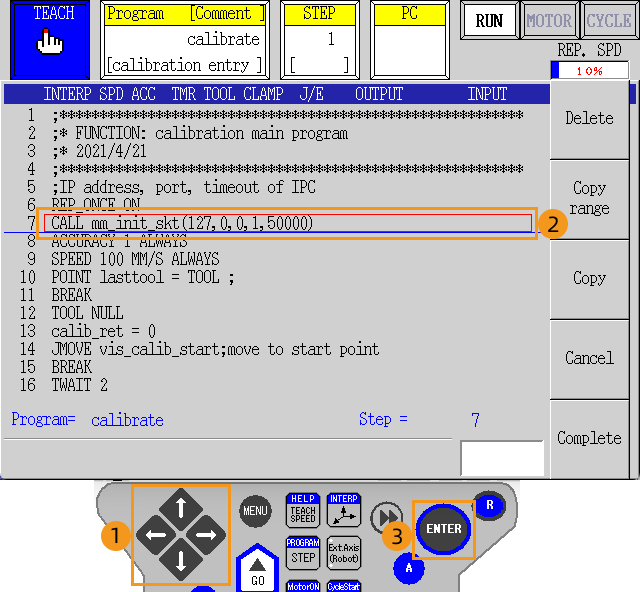
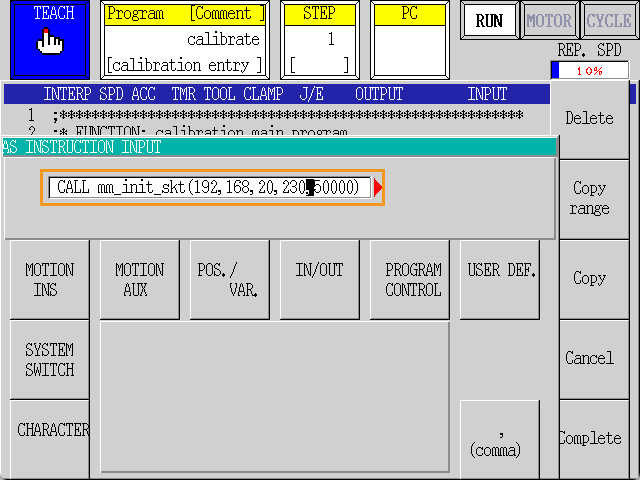
티치 펜던트의 화살표 키를 사용하여 빨간색 선택 프레임을 mm_init_skt가 있는 행으로 이동한 후 call mm_init_skt(127,0,0,1,50000)를 선택합니다. 그리고 ENTER 키를 눌러 확인합니다.
-
티치 펜던트의 화살표 키를 사용하여 입력 상자의 커서를 해당 위치로 이동시키고 127, 0, 0, 1를 IPC의 IP 주소로 수정한 후 50000을 Mech-Vision 소프트웨어의 호스트 포트 번호로 수정합니다. 수정을 완료한 후 ENTER 키를 누르고 확인한 다음 R 키를 눌러 종료합니다.
-
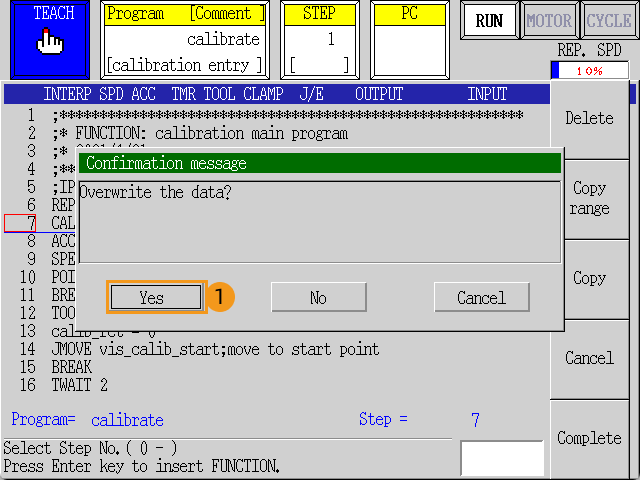
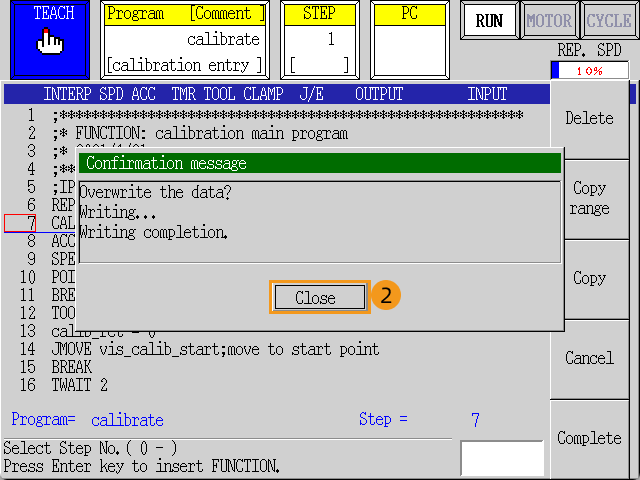
팝업 확인 창에서 Yes를 선택한 후 Close를 선택합니다.
-
2. 티치 펜던트를 통해 캘리브레이션 시작점 설정
-
수동으로 로봇을 캘리브레이션 시작점으로 이동합니다.
시작점 위치는 캘리브레이션 보드의 포인트 클라우드 품질을 확인할 때 로봇이 있는 위치로 설정할 수 있습니다.
-
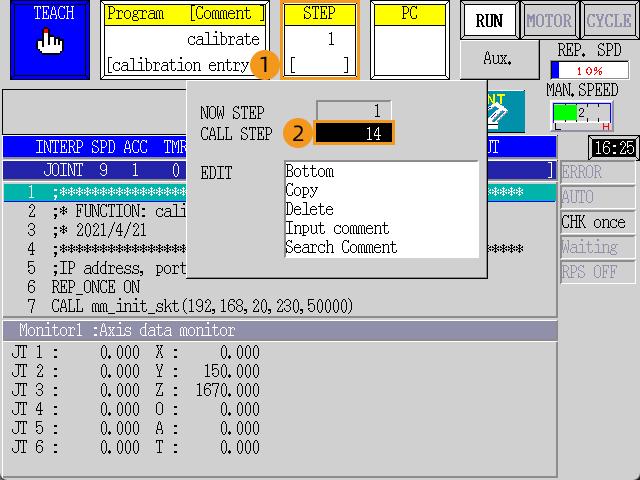
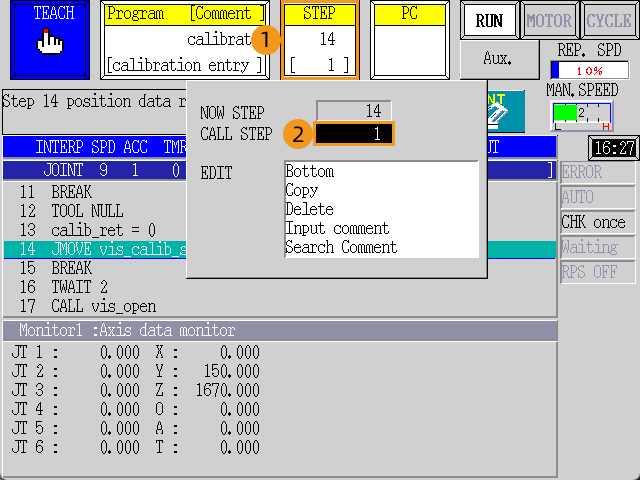
스텝 창을 클릭한 후 “JMOVE vis_calib_start;” 있는 행의 번호(예: 14)를 입력하고 ENTER 키를 눌러 확인하면 “JMOVE vis_calib_start;”있는 행을 선택할 수 있습니다.
-
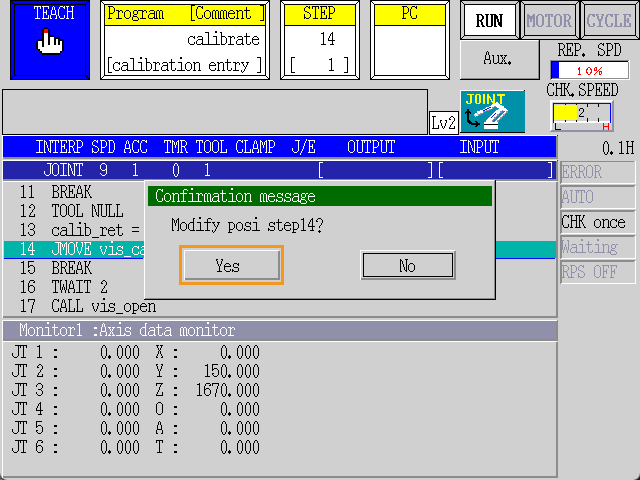
그런 다음 티치 펜던트의 A 키와 POS MOD 키를 동시에 누릅니다.
-
팝업 창에 Yes를 클릭하면 로봇의 현재 포즈를 포즈 변수 vis_calib_start에 저장할 수 있으며 앞으로의 캘리브레이션 시작점으로 직접 사용 가능합니다.
3. 캘리브레이션 프로그램 실행
-
스텝 창을 클릭하고 1을 입력하고 ENTER 키를 눌러 확인하면 프로그램이 첫 번째 줄부터 실행됩니다.
-
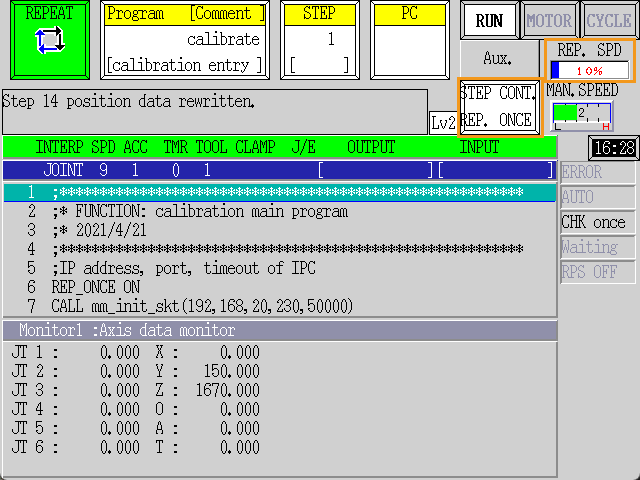
컨트롤러의 상단 패널에 있는 Teach/Repeat 스위치를 REPEAT 모드로 돌리고 티치 펜던트의 티칭 잠금을 꺼짐 위치로 설정합니다. 이때 로봇은 REPEAT 모드에 있습니다.

-
화면에서 STEP CONT. REP. ONCE 모드로 전환하고 REP. SPD를 10%로 조정합니다.
-
티치 펜던트에서 A 키를 누르는 동시에 터치스크린에서 MOTOR를 클릭하여 MOTOR에 불이 들어오도록 합니다. 티치 펜던트에서 A 키를 누르는 동시에 터치스크린에서 CYCLE를 클릭하여 CYCLE에 불이 들어오도록 합니다. 이때 RUN에 불이 들어오지 않는다면 A 키를 누르고 티치 펜던트에서 RUN/HOLD 키를 눌러야 합니다.
RUN、MOTOR、CYCLE 키가 모두 불이 켜지면 프로그램은 성공적으로 작동합니다. 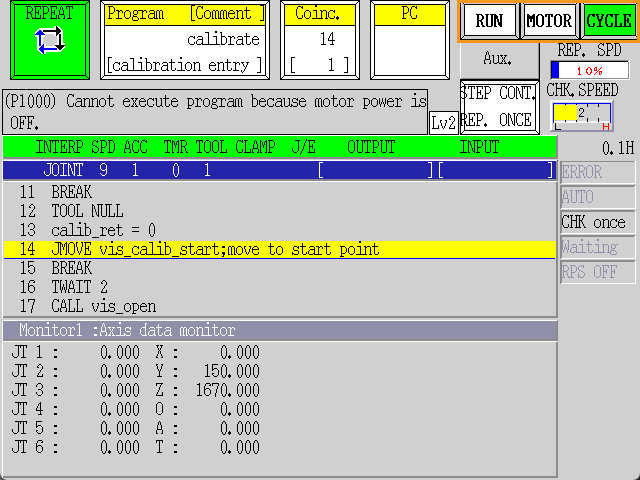
-
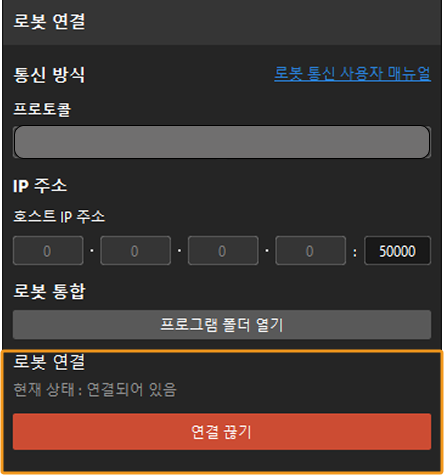
Mech-Vision의 캘리브레이션 창을 확인하고 로봇 연결 영역에 "연결됨" 상태 정보가 표시된 후, 버튼이 로봇이 연결되기를 기다리는 중...에서 연결 끊기로 변경되면 하단 바에서 다음 버튼을 클릭합니다.
-
아래 링크를 각각 참고하여 캘리브레이션 시작 중 네 번째 스텝(이동 경로 설정)과 후속 워크플로를 실행하십시오.