레지스터 사용 설명
PLC에서 사용하는 데이터 유형은 1528개의 D 레지스터를 차지하는 MM_Interface 구조체입니다. 이 구조체 변수의 시작 주소는 Mech-Vision에서 설정한 시작 주소와 동일해야 합니다. PLC와 Mech-Vision가 사용하는 시작 주소가 모두 10000인 경우 각 변수의 레지스터 주소는 다음 그림과 같습니다.
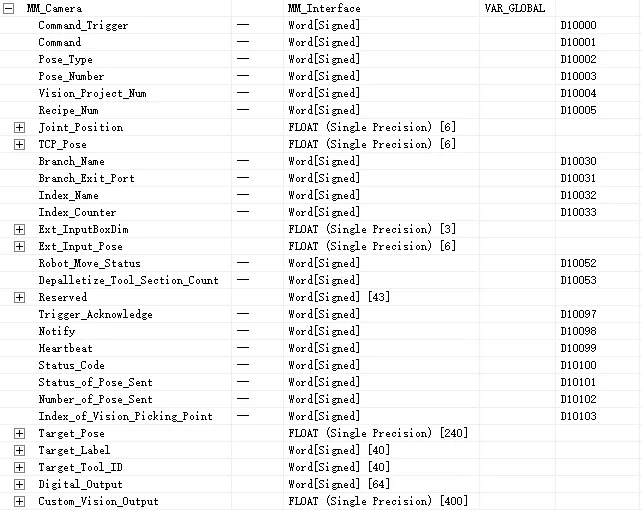
다음 표에서는 각 변수 레지스터의 시작 위치 기준 오프셋과 설명을 보여줍니다.
| 레지스터 주소 오프셋 | 명칭 | 데이터 유형 | 설명 |
|---|---|---|---|
0 |
Command_Trigger |
Word[부호 있음] |
신호 트리거 |
1 |
Command |
Word[부호 있음] |
명령어 코드 |
2 |
Pose_Type |
Word[부호 있음] |
포즈 유형 |
3 |
Pose_Number |
Word[부호 있음] |
예상되는 비전 포인트 또는 웨이 포인트 수 |
4 |
Vision_Project_Num |
Word[부호 있음] |
Mech-Vision 프로젝트 번호 |
5 |
Recipe_Num |
Word[부호 있음] |
파라미터 레시피 번호 |
6 |
Joint_Position |
Float[단일 정확도][6] |
관절 각도 데이터 |
18 |
TCP_Pose |
Float[단일 정확도][6] |
플랜지 포즈 데이터 |
30 |
Branch_Name |
Word[부호 있음] |
"메시지 분기" 스텝의 번호 |
31 |
Branch_Exit_Port |
Word[부호 있음] |
"메시지 분기" 스텝의 아웃 포트 번호 |
32 |
Index_Name |
Word[부호 있음] |
인덱스 스텝의 스텝 번호 |
33 |
Index_Counter |
Word[부호 있음] |
인덱스 스텝의 현재 인덱스 값 |
34 |
Ext_InputBoxDim |
Float[단일 정확도][3] |
Mech-Vision 프로젝트에 입력된 물체의 치수 |
40 |
Ext_Input_Pose |
Float[단일 정확도][6] |
Mech-Viz 프로젝트에 입력된 외부 로봇 말단장치 포즈 |
52 |
Robot_Move_Status |
Word[부호 있음] |
로봇 이동 상태 |
53 |
Depalletize_Tool_Section_Count |
Word[부호 있음] |
파티션 진공 그리퍼의 수 |
54 |
Reserved |
Word[부호 있음][43] |
예약됨 |
97 |
Trigger_Acknowledge |
Word[부호 있음] |
트리거 확인 |
98 |
Notify |
Word[부호 있음] |
"알림" 스텝의 메시지 |
99 |
Heartbeat |
Word[부호 있음] |
하트비트 값 |
100 |
Status_Code |
Word[부호 있음] |
상태 코드 |
101 |
Status_of_Pose_Sent |
Word[부호 있음] |
모든 비전 포인트 또는 웨이 포인트를 이미 획득했는지 여부 |
102 |
Number_of_Pose_Sent |
Word[부호 있음] |
비전 포인트 또는 웨이 포인트 수 |
103 |
Index_of_Vision_Picking_Point |
Word[부호 있음] |
계획된 경로에서 "비전 이동"의 위치 |
104 |
Target_Pose |
Float[단일 정확도][240] |
이번에 획득한 모든 비전 포인트 또는 웨이 포인트의 포즈 |
584 |
Target_Label |
Word[부호 있음][40] |
이번에 획득한 모든 비전 포인트 또는 웨이 포인트의 레이블 |
624 |
Target_Tool_ID |
Word[부호 있음][40] |
이번에 획득된 모든 웨이 포인트의 말단장치 번호 |
664 |
Digital_Output |
Word[부호 있음][64] |
비전 시스템이 반환한 64개의 DO 신호 |
728 |
Custom_Vision_Output |
Float[단일 정확도][400] |
이번에 획득한 모든 비전 포인트의 사용자 정의 데이터 |