ABB 로봇의 경우 표준 인터페이스 프로그램이 백그라운드에서 실행하는 방법
ABB 로봇의 경우 메인 프로그램이 서브 프로그램을 호출할 때 메인 프로그램은 포그라운드 프로그램에 속하고 서브 프로그램은 백그라운드 프로그램에 속하며 로봇 시스템이 부팅된 후 자동으로 실행되어야 합니다. 다음에서는 ABB 로봇에서 표준 인터페이스 백그라운드 프로그램을 생성하고 백그라운드 실행을 구현하는 방법을 설명합니다.
| 시작하기 전에 ABB 표준 인터페이스 통신 구성을 완료했는지 확인하십시오. |
백그라운드 프로그램을 생성하고 실행하기
-
다음 그림을 참조하여 RobotStudio를 사용하여 로봇을 연결하고 순서대로 를 클릭하여 백그라운드에서 실행하는 데 사용되는 서브 프로그램을 생성합니다(예: mm_vision).
처음으로 서브 프로그램을 생성할 때 프로그램의 Type은 임시로 Normal로 설정되고 이 모드에서 프로그램 코드를 작성할 수 있습니다. 프로그램이 테스트를 통과한 후 프로그램의 Type을 Semistatic으로 변경합니다(프로그램이 백그라운드에서 자동으로 실행됨을 나타냄). 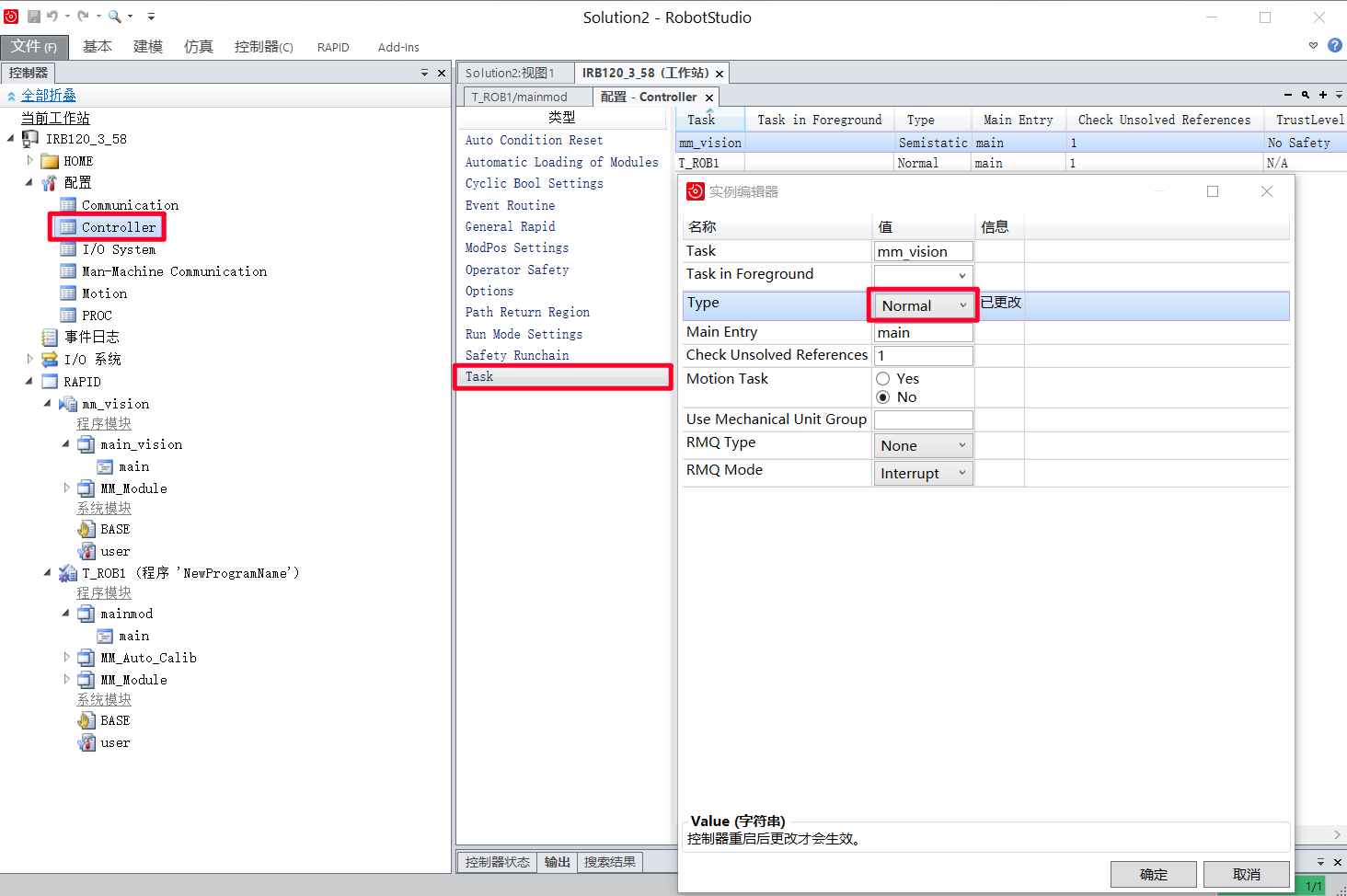
-
컨트롤러를 다시 시작합니다.
-
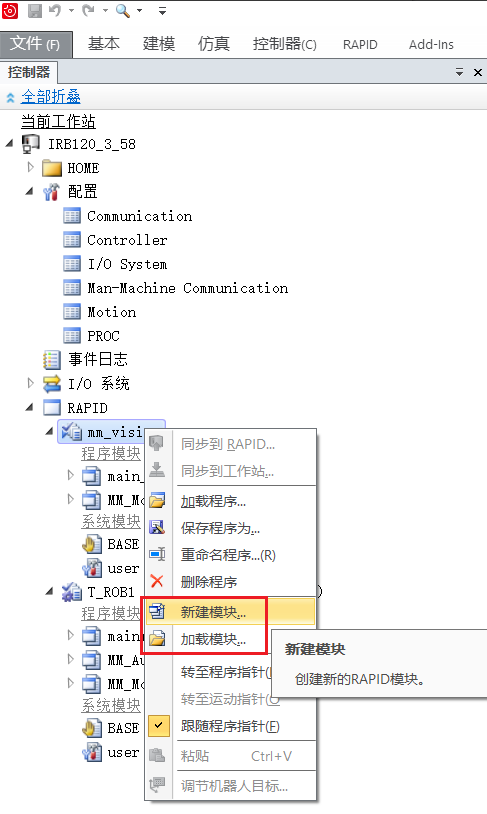
컨트롤러를 다시 시작한 후, mm_vision 태스크에서 이전에 로드한 표준 인터페이스 모듈 MM_Module을 로드하고, main_vision 모듈을 새로 생성합니다.
-
main_vision 모듈을 열고 서브 프로그램과 관련된 코드를 작성합니다. 예를 들어, 그림의 샘플 코드는 Mech-Vision 프로젝트 실행을 트리거하고 비전 결과를 획득하기를 의미합니다.

-
위의 코드를 테스트한 후 아래 그림과 같이 백그라운드 프로그램 mm_vision의 Type을 Semistatic으로 변경한 다음, 컨트롤러를 다시 시작하여 백그라운드 프로그램이 시작될 때 자동으로 실행되도록 할 수 있습니다.

포그라운드 프로그램을 생성하고 실행하기
-
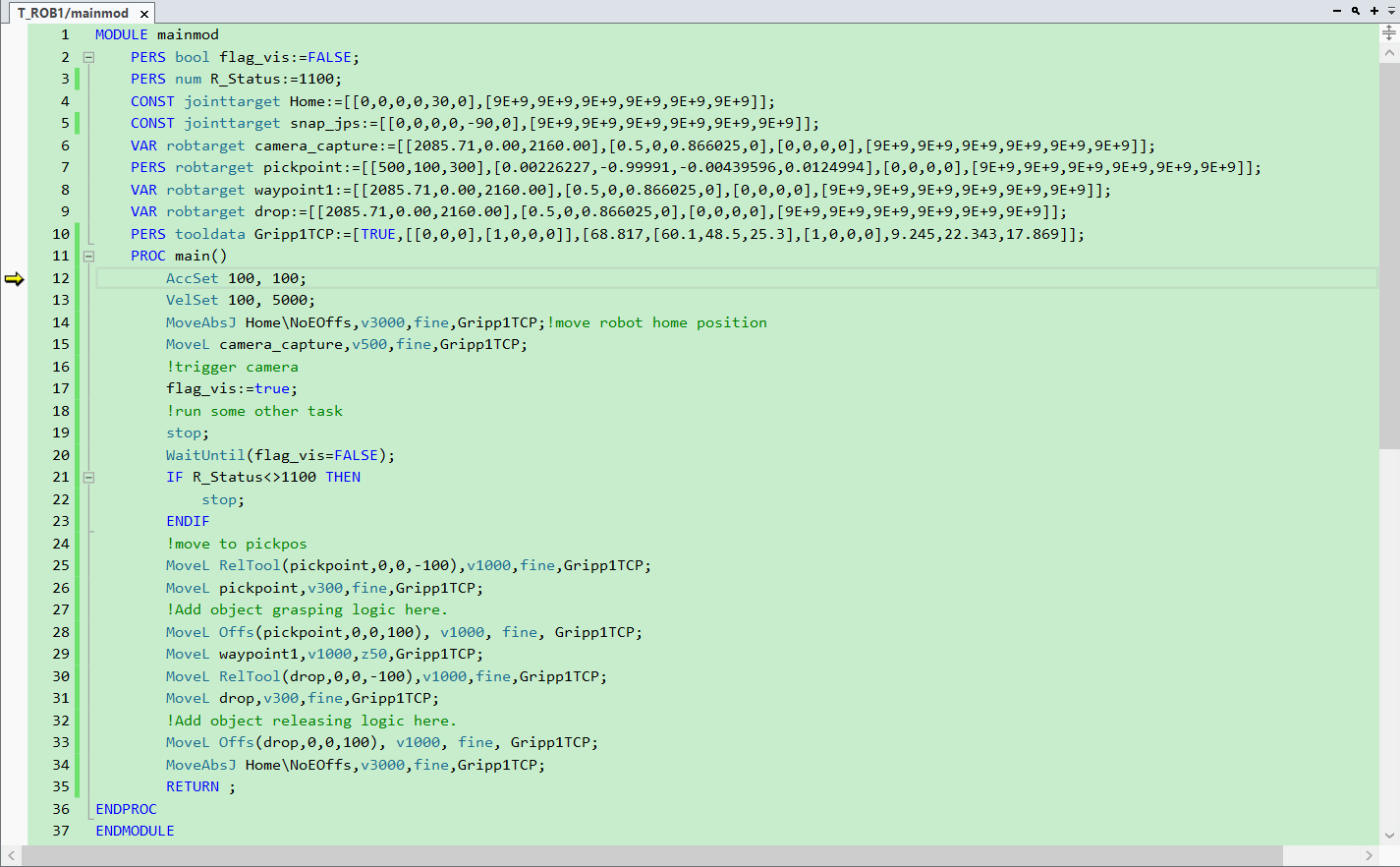
실제 응용 작업 흐름에 따라 메인 프로그램(포그라운드 프로그램)을 생성하고 작성합니다. 예를 들어 그림의 샘플 코드는 flag_vis가 true인 경우 메인 프로그램이 서브 프로그램을 호출함을 의미합니다.
-
백그라운드 프로그램이 실행 중인지 확인한 후 위의 포그라운드 프로그램을 실행합니다. 구체적인 실행 방법은 캘리브레이션 프로그램 실행을 참조하십시오.