샘플 프로그램2:MM_S2_Viz_Basic
프로그램 소개
기능 설명 |
PLC가 Mech-Viz 프로젝트 실행을 트리거한 다음 Mech-Viz가 계획한 경로를 획득합니다. |
파일 경로 |
Mech-Viz 소프트웨어 설치 디렉터리의 |
필요한 프로젝트 |
Mech-Vision 프로젝트와 Mech-Viz 프로젝트 |
사용 조건 |
|
| 이 샘플 프로그램은 참고용으로만 제공됩니다. 사용자는 실제 상황에 맞게 이 내용을 바탕으로 수정해야 하며, 해당 프로그램을 그대로 사용하지 않도록 하십시오. |
프로그램 설명
다음은 MM_S2_Viz_Basic 샘플 프로그램에 대한 설명입니다.




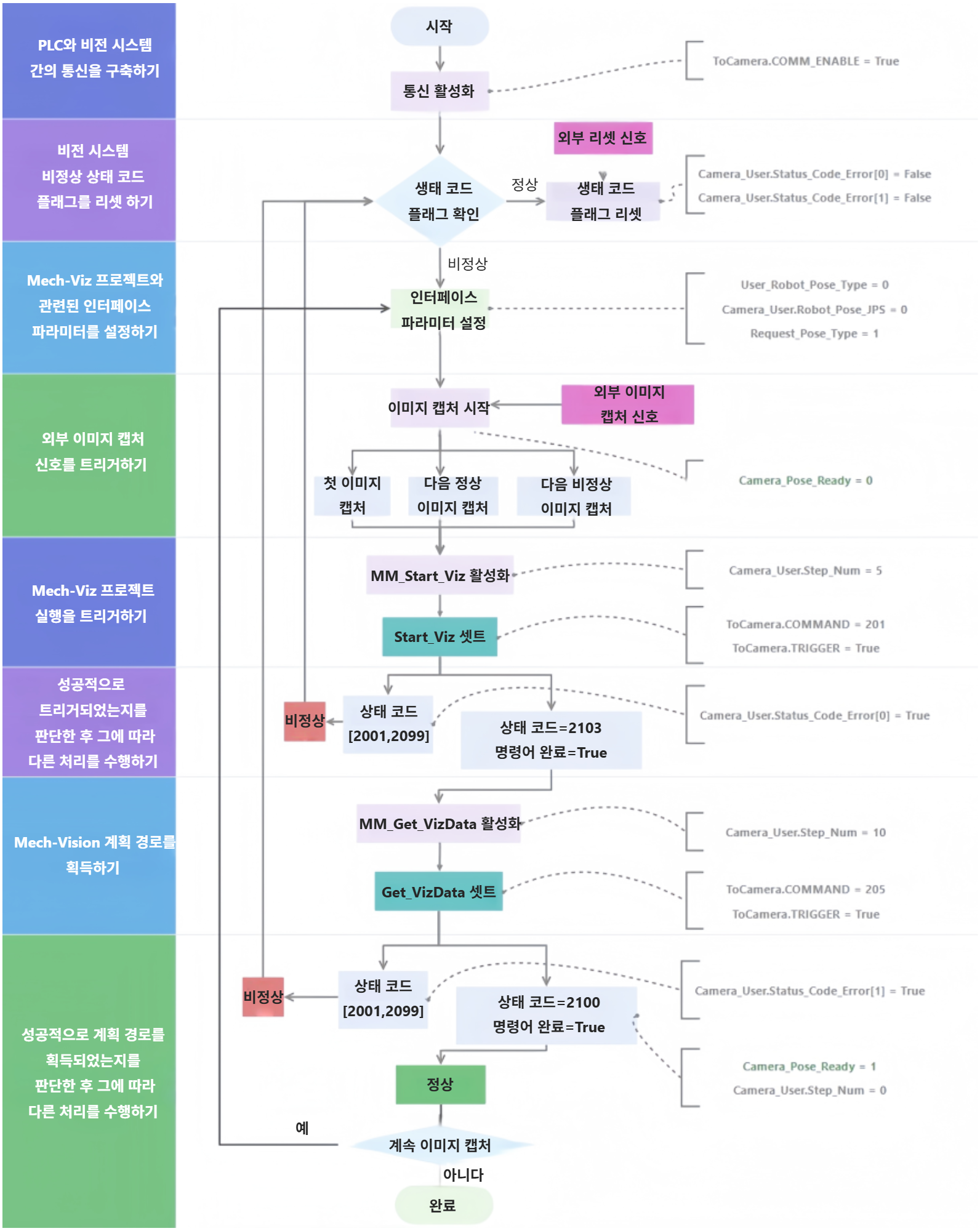
이 샘플 프로그램에 해당하는 작업 흐름은 아래 그림과 같습니다.
아래 표는 이 프로그램에 대한 설명입니다.
|
| 워크플로 | 설명 | ||
|---|---|---|---|
PLC가 비전 시스템과 통신 구축하기 |
따라서 Rung 0은 ToCamera.COMM_ENABLE을 셋트하고, 첫 번째 스캔 사이클에서만 Camera_Pose_Ready를 2로 설정함을 나타냅니다. |
||
비전 시스템 비정상 상태 코드 플래그 리셋 |
따라서 Rung 1은 External_Reset_Camera_Error가 트리거되면 Camera_User.Status_Code_Error[0]과 Camera_User.Status_Code_Error[1]을 리셋함을 나타냅니다. |
||
Mech-Viz 프로젝트와 관련된 인터페이스 파라미터 설정하기 |
따라서 Rung 2는 User_Robot_Pose_Type을 2로 설정함을 의미합니다.
따라서 Rung 3은 User_Robot_Pose_Type이 2인 경우 Camera_User.Robot_Pose_JPS[0]~[5]를 순차적으로 10000, 20000, 30000, 40000, 50000, 60000으로 설정함을 나타냅니다. |
||
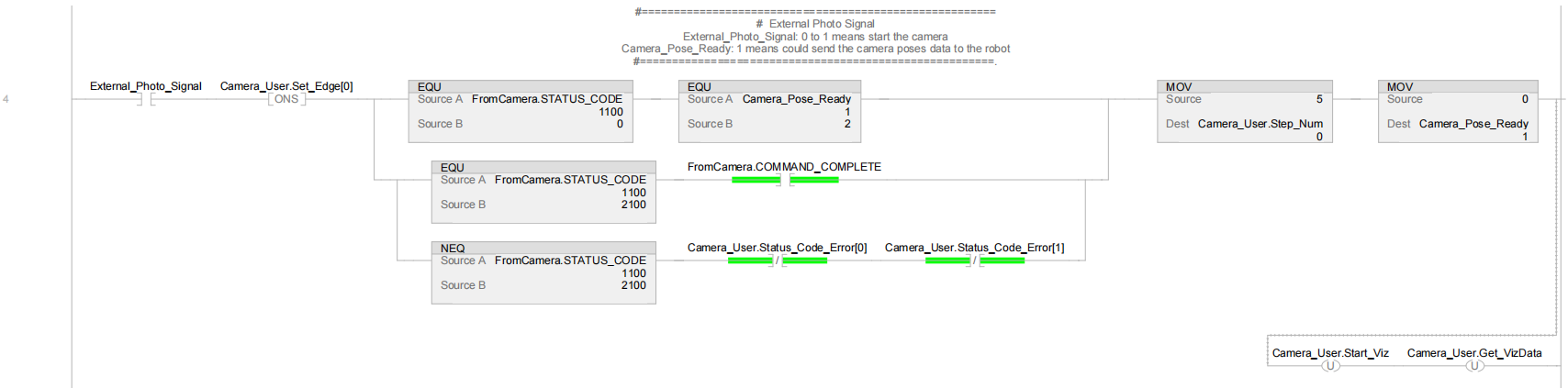
외부 이미지 캡처 신호 트리거하기 |
따라서 Rung 4는 외부 이미지 캡처 신호 External_Photo_Signal의 상승 에지를 감지하여 다음 세 가지 촬영 시나리오를 연속으로 수행함을 나타냅니다.
마지막으로 Camera_User.Step_Num 값을 5로 설정하고, Camera_Pose_Ready 값을 0으로 설정한 다음, Camera_User.Start_Viz와 Camera_User.Get_VizData를 리셋합니다. |
||
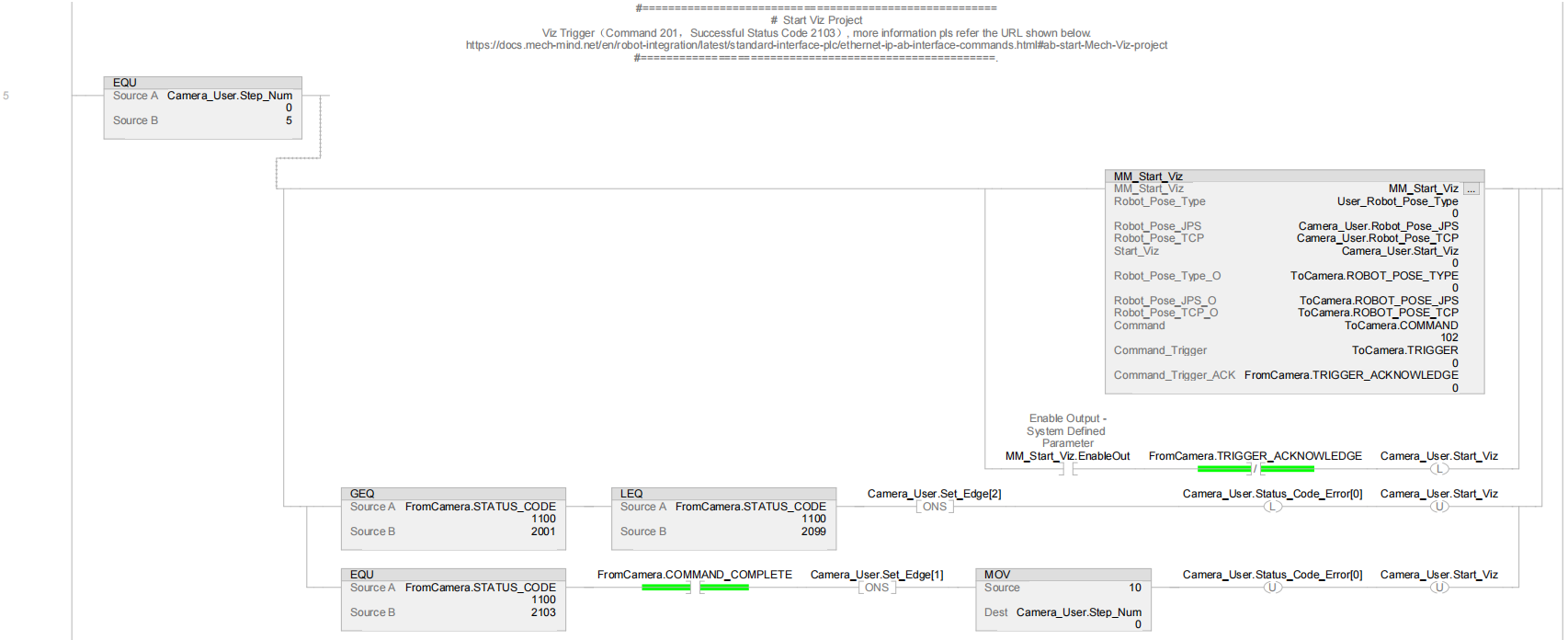
Mech-Viz 프로젝트 실행을 트리거하고 결과에 따라 다르게 처리하기 |
Rung 5는 Camera_User.Step_Num이 5와 같으면 다음 논리가 실행됨을 의미합니다.
|
||
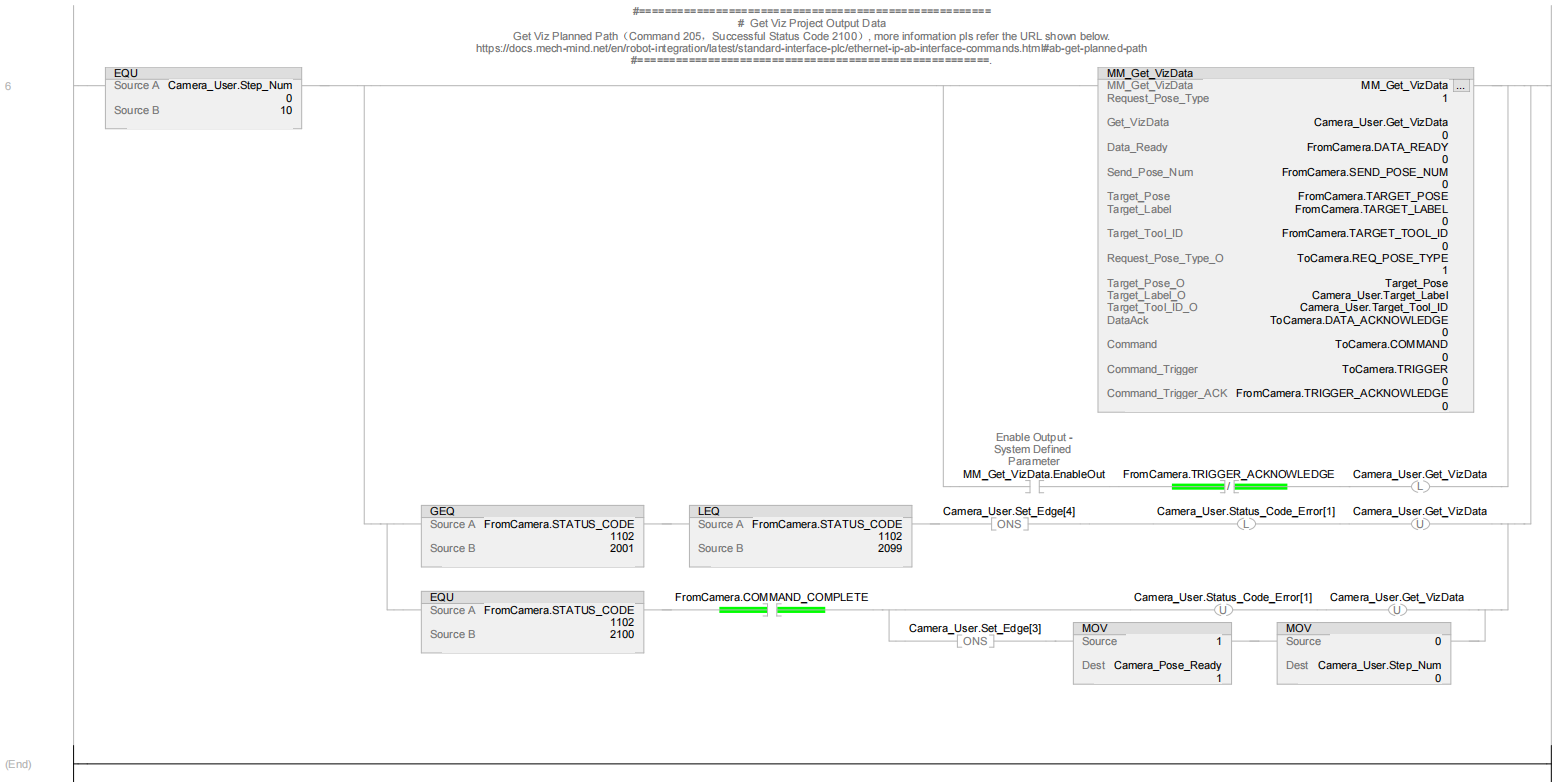
Mech-Viz 계획 경로를 획득하고 결과에 따라 다르게 처리하기 |
Rung 6은 Camera_User.Step_Num이 10과 같으면 다음 논리가 실행됨을 의미합니다.
|