표준 인터페이스 명령어 호출 순서
이 부분에서는 표준 인터페이스 명령어의 호출 순서와 관계를 소개하고, 다양한 통신 대상(로봇 및 PLC)에 따라 구체적인 호출 프로세스를 소개합니다.
로봇 프로그램 호출 명령어 설명
구축 중인 프로젝트에 따라 로봇 프로그램이 호출하는 명령어는 크게 두 가지 범주( Mech-Vision 프로젝트 관련 명령어 와 Mech-Viz 프로젝트 관련 명령어 )로 나눌 수 있습니다.
Mech-Vision 프로젝트 관련 명령어
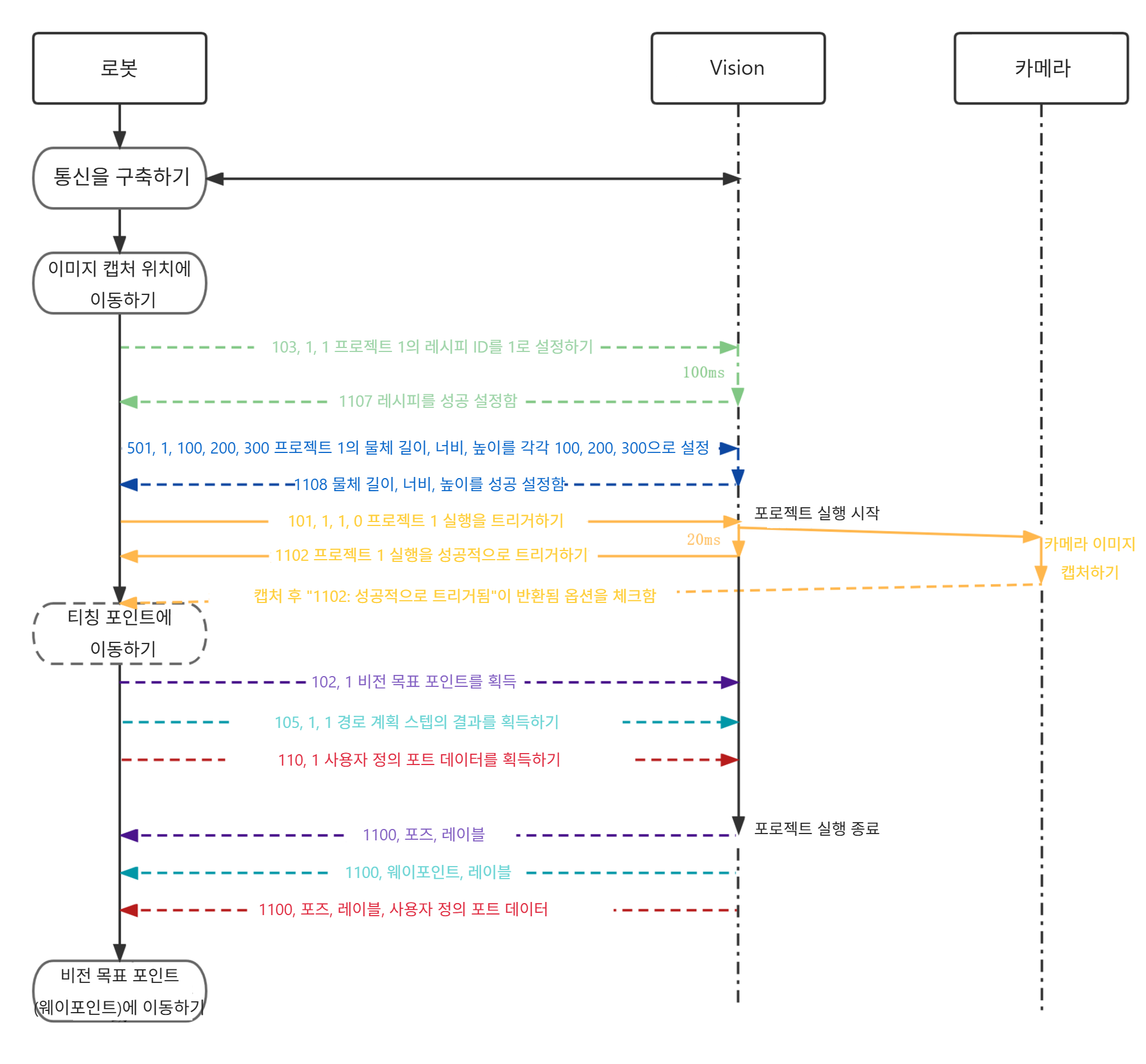
Mech-Vision 프로젝트와 관련된 명령어의 호출 순서는 다음과 같습니다.
-
Mech-Vision 프로젝트(101 명령어) 실행 *전*에 호출해야 하는 명령어:
-
Mech-Vision 파라미터 레시피를 전환하기(103 명령어)
-
Mech-Vision 프로젝트에 물체 치수 입력(501 명령어)
-
-
Mech-Vision 프로젝트 트리거(101 명령어)
-
Mech-Vision 프로젝트 실행 *후*에 호출되는 명령어:
-
비전 결과를 가져오기(102 명령어)
-
Mech-Vision에서 계획된 경로를 가져오기(105 명령어)
-
Mech-Vision에서 사용자 정의 데이터를 가져오기(110 명령어)
102, 105 및 110 명령어는 동시에 사용할 수 없습니다.
-
아래 그림은 Mech-Vision 프로젝트에서 일반적으로 사용되는 명령어의 제어 타이밍 다이어그램으로, 점선은 옵션 명령어(실제 프로젝트에 따라 호출 여부가 다름)를 나타내고, 실선은 반드시 호출해야 하는 명령어를 나타냅니다.
Mech-Viz 프로젝트 관련 명령어
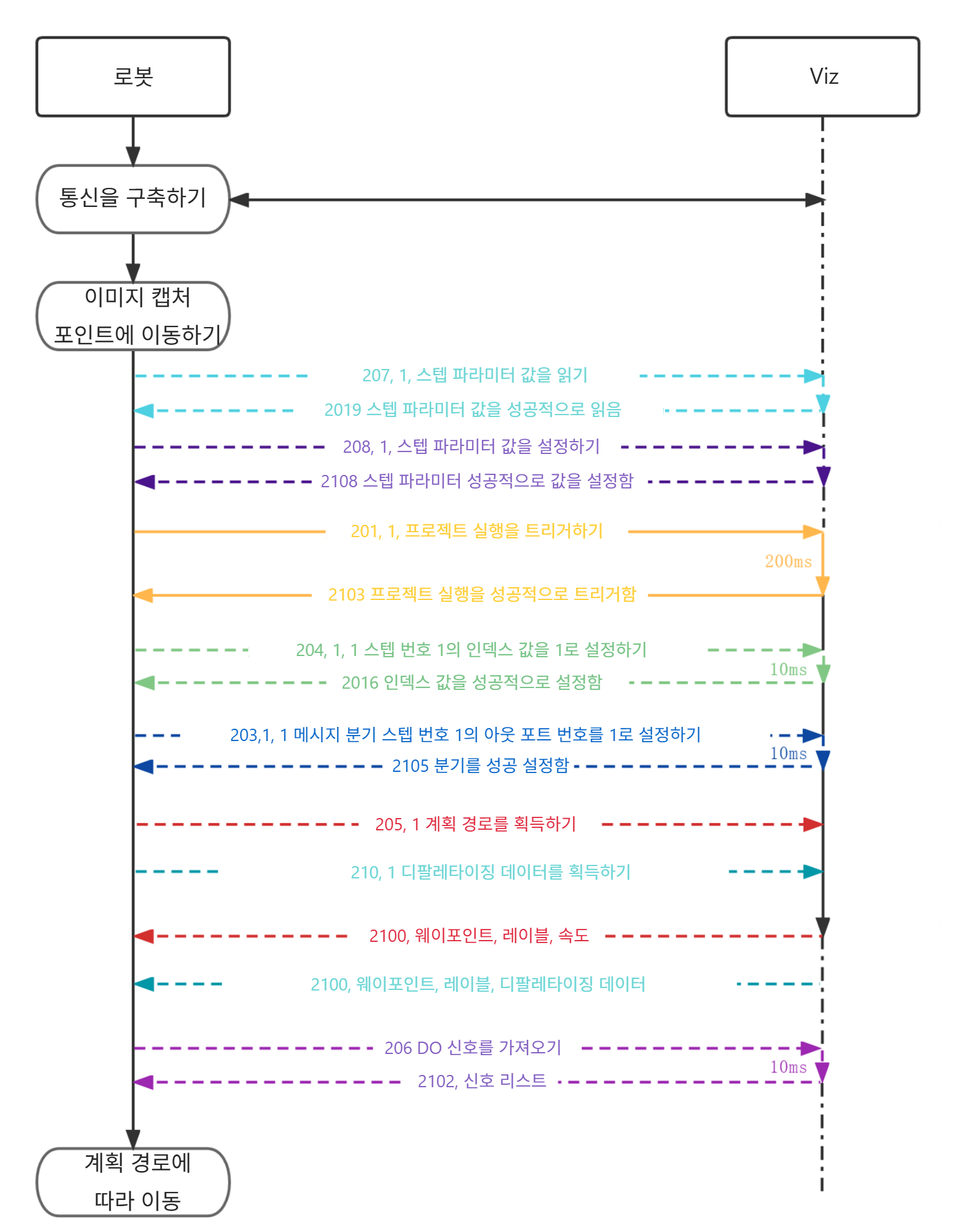
Mech-Viz 프로젝트와 관련된 명령어의 호출 순서는 다음과 같습니다.
-
Mech-Viz 프로젝트(201 명령어) 실행 *전*에 호출해야 하는 명령어:
-
Mech-Viz 스텝 파라미터 읽기(207 명령어)
-
Mech-Viz 스텝 파라미터 설정(208 명령어)
-
-
Mech-Viz 프로젝트 트리거(201 명령어)
-
Mech-Viz 프로젝트 실행 *중*에 호출되는 명령어:
-
Mech-Viz의 현재 인덱스 설정(204 명령어)
-
Mech-Viz "메시지 분기" 스텝의 아웃 포트 설정(203 명령어)
-
Mech-Viz에서 계획된 경로를 가져오기(205 명령어)
-
Mech-Viz에서 비전 이동 데이터 또는 사용자 정의 데이터를 가져오기(210 명령어)
-
명령어 204와 203은 명령어 205와 210보다 먼저 호출되어야 합니다.
-
205 및 210 명령어는 동시에 사용할 수 없습니다.
-
-
Mech-Viz 프로젝트 실행 *후*에 호출되는 명령어:
-
그리퍼의 DO 신호를 가져오기(206 명령어)
-
아래 그림은 Mech-Viz 프로젝트에서 일반적으로 사용되는 명령어의 제어 타이밍 다이어그램으로, 점선은 옵션 명령어(실제 프로젝트에 따라 호출 여부가 다름)를 나타내고, 실선은 반드시 호출해야 하는 명령어를 나타냅니다.
PLC 프로그램 호출 명령어 설명
PLC 프로그램 호출 명령의 흐름은 아래 그림과 같습니다.
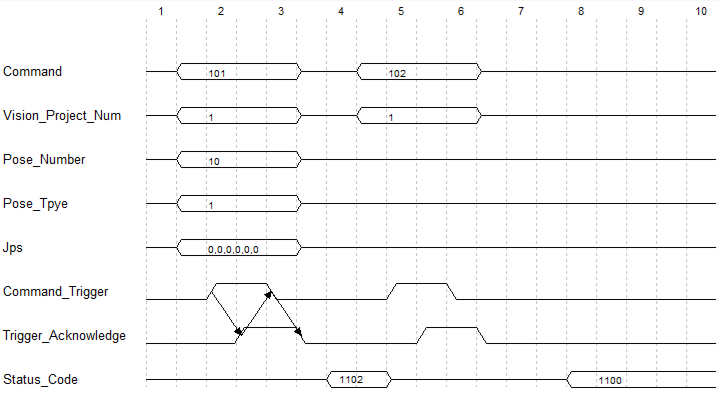
설명:
-
각 명령어의 요구 사항에 따라 명령어 코드와 명령어 파라미터가 해당 레지스터에 기록됩니다. 예를 들어 Command에는 101이 기록되고 Vision_Project_Num에는 1(프로젝트 번호)이 기록됩니다.
-
명령이 트리거되면 PLC는 Command_Trigger를 1로 설정하고 비전 시스템은 명령어 코드와 명령어 파라미터를 읽습니다.
-
비전 시스템이 Command_Trigger가 1이라는 것을 읽은 후 Trigger_Acknowledge가 1로 설정됩니다.
-
PLC는 Trigger_Acknowledge가 1이라는 것을 읽은 후 Command_Trigger는 0으로 설정되고 다음 명령어 코드와 명령어 파라미터가 해당 레지스터에 기록됩니다.
-
비전 시스템이 Command_Trigger가 0이라는 것을 읽은 후 Trigger_Acknowledge가 0으로 설정됩니다.
특정 명령어를 호출하는 순서는 Mech-Vision 프로젝트 관련 명령어 및 Mech-Viz 프로젝트 관련 명령어를 참고하시기 바랍니다.