ESTUN 표준 인터페이스 통신 구성
이 부분에서는 로봇 표준 인터페이스 프로그램을 ESTUN 로봇에 플래싱하고 Mech-Mind 비전 시스템과 로봇 간의 표준 인터페이스 통신 구성을 완료하는 방법에 대해 소개합니다.
| 표준 인터페이스 프로그램을 플래싱하는 것은 로봇의 표준 인터페이스 프로그램과 구성 파일을 로봇 시스템으로 도입하여 비전 시스템과 로봇 간의 표준 인터페이스 통신을 실현합니다. |
하드웨어 및 소프트웨어 버전 확인하기
|
아래에 나열된 버전 및 모델은 테스트를 거쳐 사용할 수 있습니다. 다른 모델 및 버전은 본 문서를 참고하여 작업할 수 있으며, 문제가 발생하면 Mech-Mind 기술 지원팀에 문의하십시오. |
-
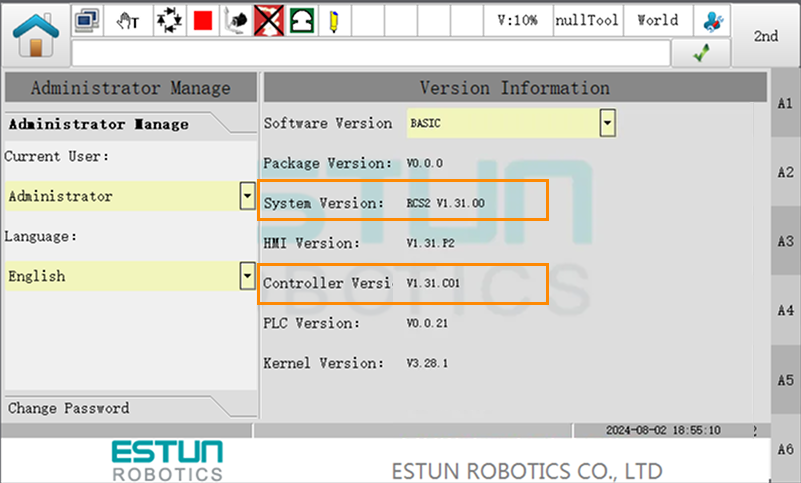
시스템 버전: RCS2 V1.32, V1.33, V1.36.06.
-
컨트롤러 버전: V1.32, V1.33, V1.36.06.
권장 시스템 버전을 사용하십시오. 아래 버전은 비전 시스템과 정상적으로 통신하지 못할 수 있습니다:
현재 호환되지 않는 버전: 1.34, 1.35 및 1.36.01 - 1.36.05
호환 여부를 확인할 수 없는 버전: 1.36.06 이상의 향후 버전
티치 펜던트 인터페이스에서 User Login 버튼을 클릭하여 아래 같은 인터페이스에서 버전 정보를 확인할 수 있습니다.
네트워크 연결 설정하기
하드웨어 연결
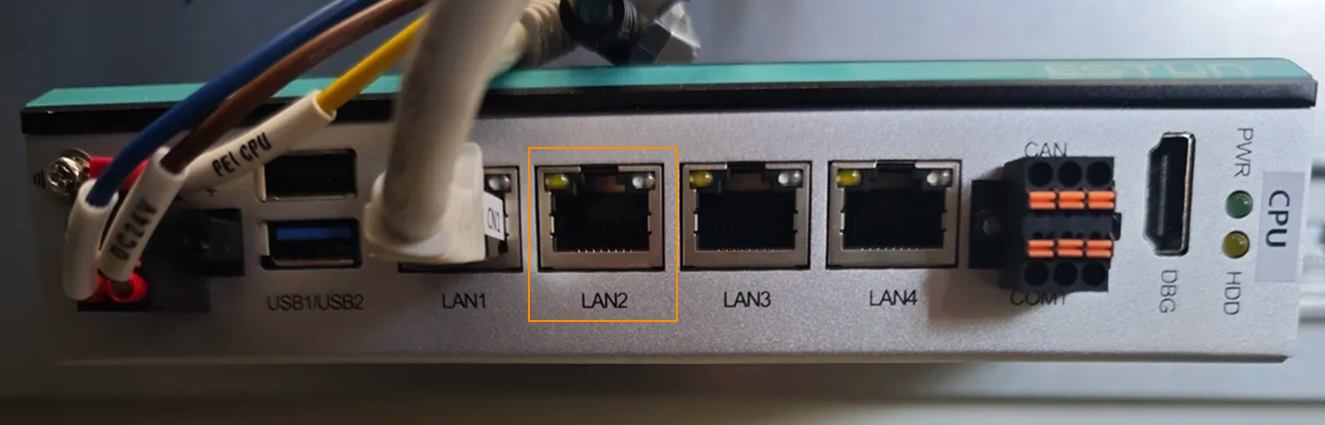
네트워크 케이블의 한쪽 끝을 IPC의 네트워크 포트에 삽입하고, 다른 쪽 끝을 컨트롤러의 LAN2 포트 또는 LAN3 포트에 삽입하십시오.
|
IP 주소 설정하기
-
TEACH 모드에서 메인 인터페이스의 User Login 버튼을 클릭하십시오. Current User 드롭다운 리스트에서 Administrator를 선택하고 비밀번호(기본값은 000000)를 입력하여 관리자 권한으로 전환하십시오.
-
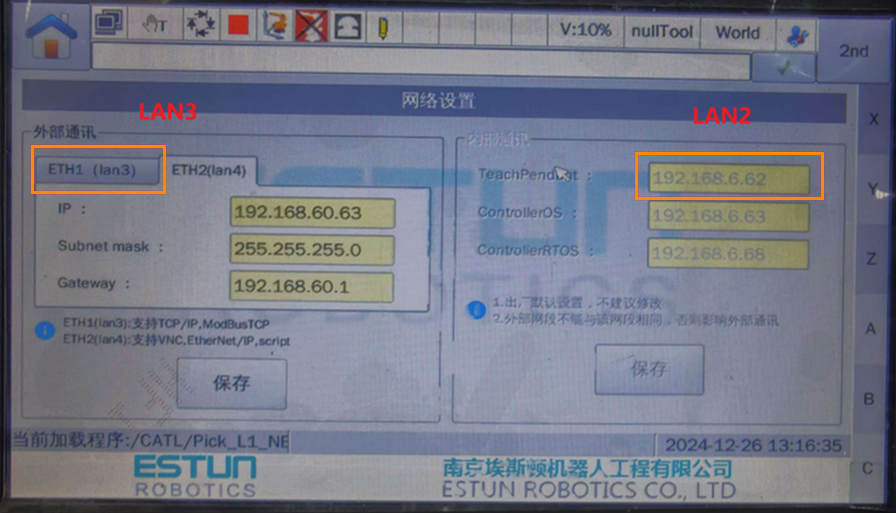
관리자 권한으로 로그인한 후, 메인 화면으로 돌아가고 차례로 버튼을 클릭하십시오. 선택한 네트워크 포트에 따라 해당 IP 주소를 확인하거나 설정하십시오.
-
IPC에서 IP 주소를 설정합니다. IPC의 IP 주소와 컨트롤러의 IP 주소가 동일한 세그먼트에 위치하도록 하고 ping 명령어를 사용하여 테스트를 수행하여 네트워크 연결이 성공했는지 확인합니다.
"로봇 통신 구성" 설정
-
Mech-Vision 소프트웨어를 시작합니다. 표시되는 인터페이스에 따라 다음의 적절한 방법을 선택하여 솔루션을 생성하십시오.
-
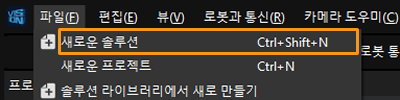
시작 화면이 나타나면 새로운 솔루션 만들기를 클릭하여 새로운 솔루션을 만듭니다.

-
메인 인터페이스가 나타나면 메뉴 바에서 을 차례로 클릭하여 새로운 솔루션을 만듭니다.
-
-
Mech-Vision 툴 바에서 로봇 통신 구성을 클릭합니다.
-
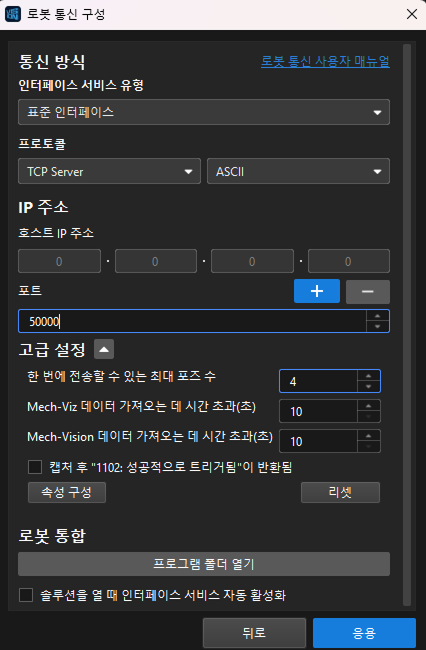
로봇 통신 구성 창에서 다음 구성을 수행합니다.
-
로봇 선택 드롭다운 메뉴를 클릭하고 *목록에 있는 로봇*을 선택한 다음 로봇 모델 선택을 클릭하여 로봇 모델을 선택합니다. 그다음 다음을 클릭합니다.
-
통신 방식 화면에서 인터페이스 서비스 유형을 표준 인터페이스로 선택하고, 프로토콜을 TCP Server로 선택하며 프로토콜 형식을 ASCII으로 선택합니다.
-
고급 설정 에서 한 번에 전송할 수 있는 최대 포즈 수 는 4 로 설정합니다.
-
로봇 통합 에서 프로그램 폴더 열기를 한 번 클릭합니다.
-
프로그램 파일을 수동으로 로드하려면 이 스텝을 수행해야 합니다. 그렇지 않으면 이 스텝을 건너뛰십시오.
-
이후 로드를 위해 필요한 파일이 이 폴더에서 복사됩니다. 이 폴더를 닫지 마십시오.
-
-
(선택 사항) 솔루션을 열 때 인터페이스 서비스 자동 활성화 를 선택합니다.
-
적용을 클릭합니다.
-
-
Mech-Vision 메인 화면에서 툴 바의 "인터페이스 서비스" 기능이 활성화되어 있는지 확인하십시오.
백업
파일을 로봇에 플래싱하기 전에 오작동 후 복구를 위해 로봇의 원래 프로그램을 먼저 백업하는 것이 좋습니다.
-
티치 펜던트의 USB 포트에 USB를 삽입합니다.
-
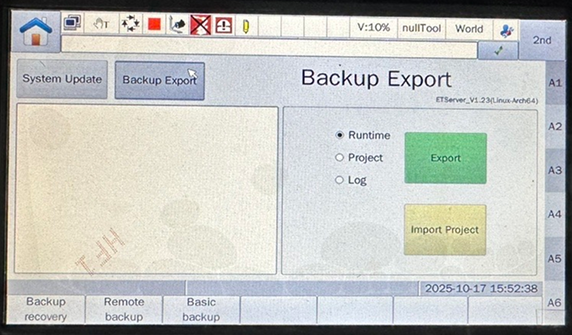
TEACH 모드에서 관리자 권한으로 전환하고 메인 화면으로 돌아가 를 차례로 클릭하면 백업 내보내기 인터페이스가 나타납니다.
-
필요에 따라 내보내기 유형(런타임 패키지, 프로젝트 프로그램 및 시스템 로그 포함)을 선택한 다음 Export를 클릭하고 관리자 비밀번호(기본값 000000)를 입력하여 확인합니다. 확인이 완료되면 컨트롤러에 내보내기를 요청합니다.
티치 펜던트에 USB가 삽입되지 않은 경우 USB를 삽입하라는 메시지가 표시됩니다. 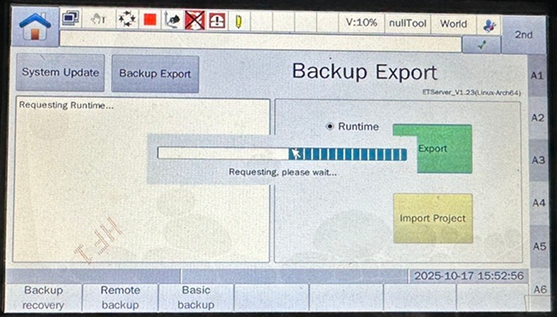
-
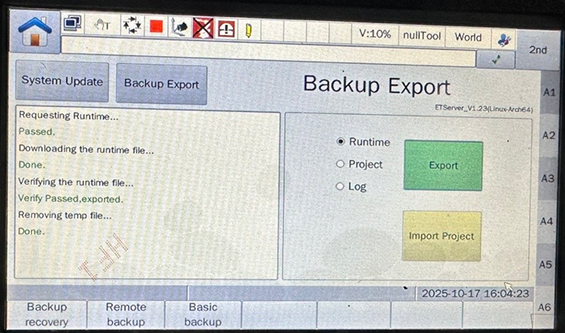
요청이 승인되면 내보내기 이름 변경 대화 상자가 표시됩니다. 내보내기 이름을 설정한 후 해당 파일 내보내기가 시작됩니다. 내보내기가 완료되면 아래 그림과 같이 표시된 후 USB를 안전하게 제거하십시오.
-
내보내기가 완료되기 전에 USB를 제거하지 마십시오. 그렇지 않으면 내보내기된 파일이 존재하지 않거나 손상될 수 있습니다.
-
백업 내보내기는 약 5-10분이 소요되므로 기다려 주십시오.
-
로봇에 표준 인터페이스 프로그램을 플래싱하기
-
IPC에서 열린 플래싱 프로그램 폴더(
ESTUN폴더)에서MM_Interface.er폴더로 들어갑니다.플래싱 프로그램 폴더는 Mech-Vision 및 Mech-Viz 설치 디렉터리의
Communication Component/Robot_Interface/ESTUN경로에서 찾을 수 있습니다. -
텍스트 편집 소프트웨어를 사용하여
MM_AUTO_CALIBRATION.erp과MM_INIT_SKT.erp을 각각 열고 실제 상황에 따라 t_p.IP.value[1] ~ t_p.IP.value[4] 값과 t_p.PORT.value 값을 수정합니다. t_p.IP.value[1] ~ t_p.IP.value[4]는 각각 IPC IP 주소의 네 그룹 숫자에 해당하며, t_p.PORT.value는 Mech-Vision에서 설정한 호스트 포트 번호입니다. -
USB를 IPC에 삽입한 후 전체
MM_Interface.er폴더를 USB의 주 디렉터리에 복사하고, 마지막으로 USB를 안전하게 제거합니다. -
TEACH 모드에서 메인 인터페이스의 User Login 버튼을 클릭하십시오. Current User 드롭다운 리스트에서 Administrator를 선택하고 비밀번호(기본값은 000000)를 입력하여 관리자 권한으로 전환하십시오.
-
티치 펜던트의 USB 포트에 USB를 삽입합니다.

-
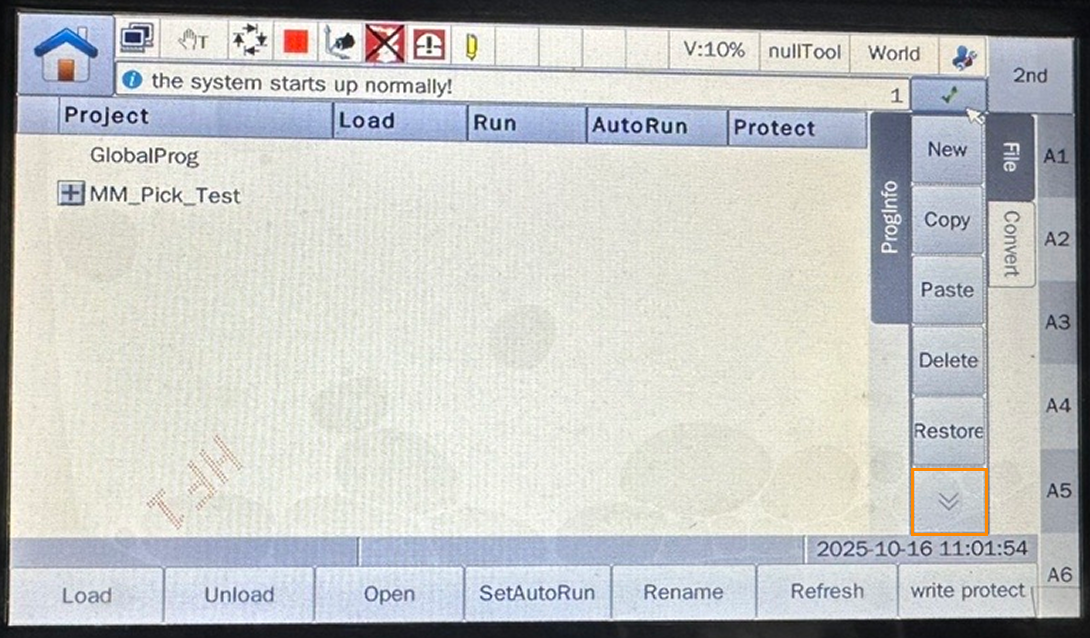
티치 펜던트의 폴더 버튼을 클릭합니다.

-
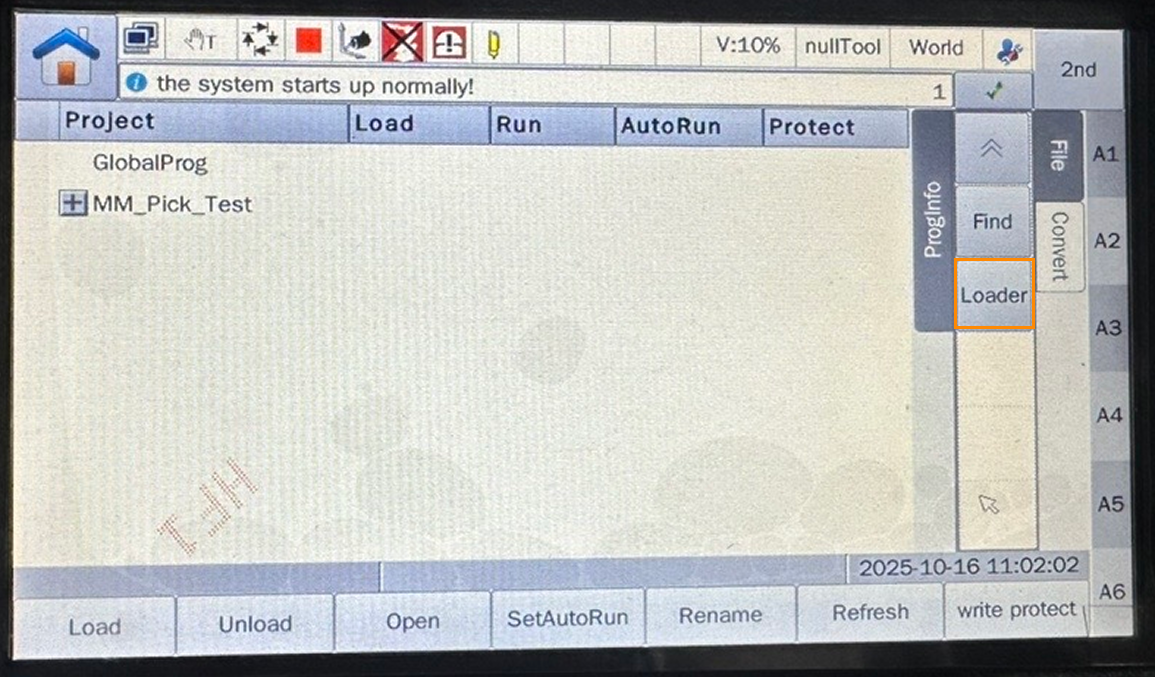
차례로 menu:︾[Loader > U-Path] 버튼을 클릭합니다.
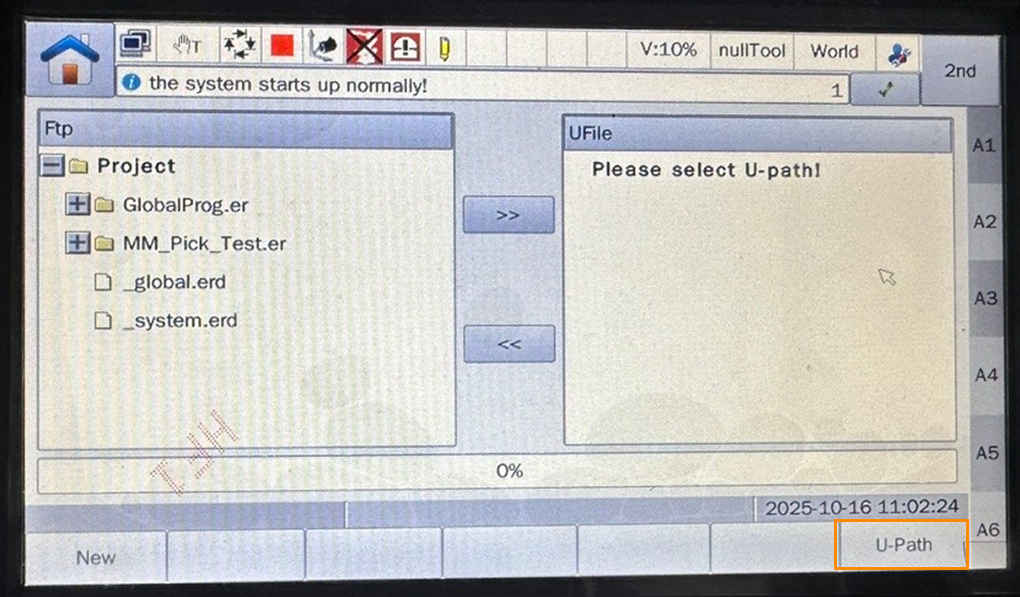
-
MM_Interface.er를 선택하고 OK 버튼을 클릭합니다.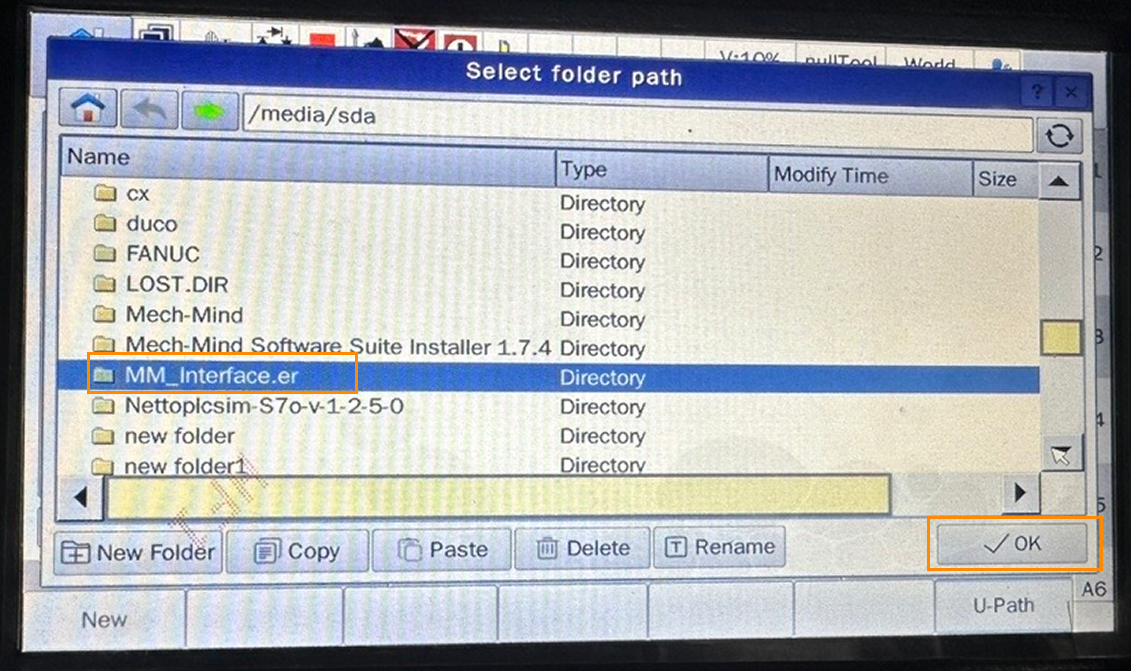
-
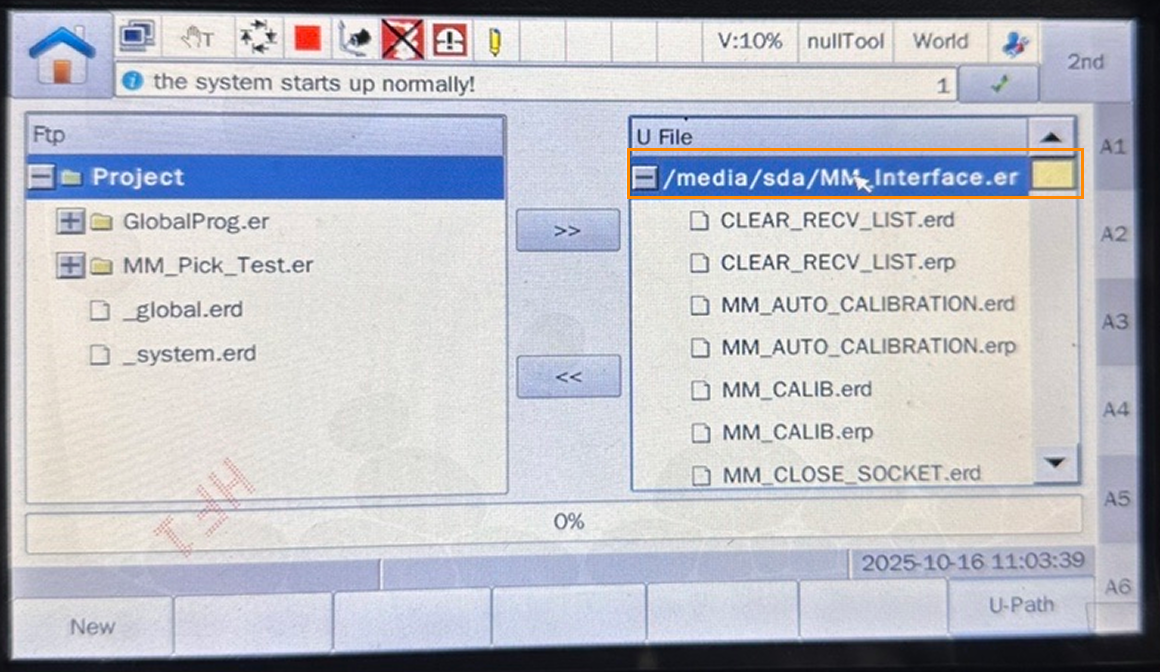
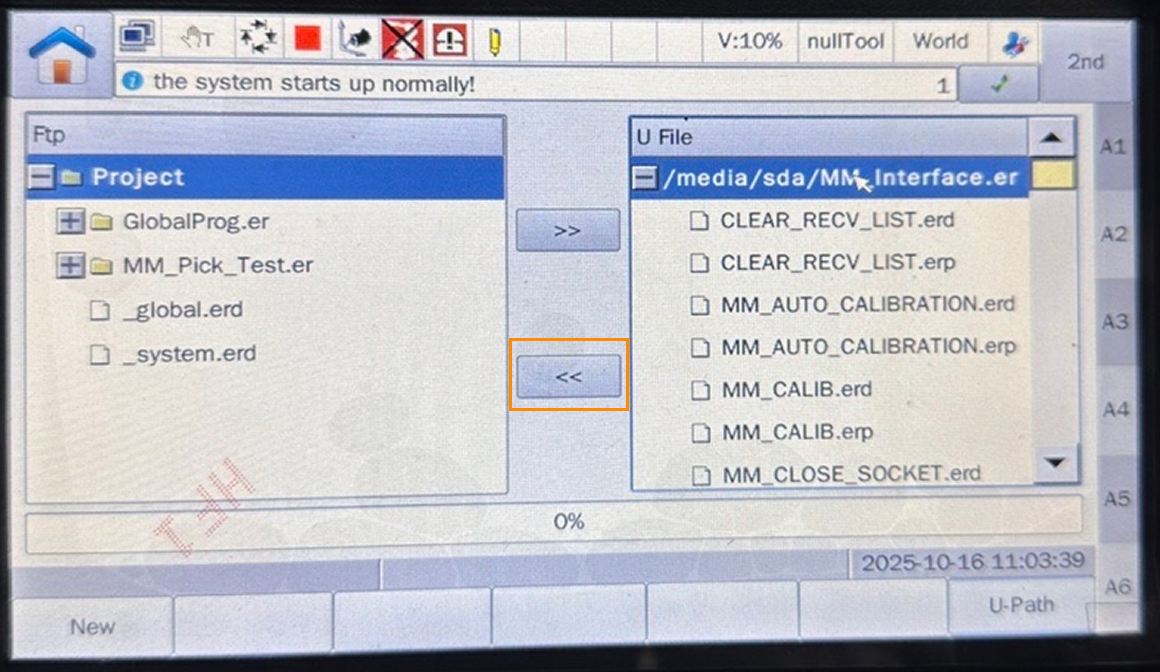
좌측 Ftp에서 Project를 선택하고 우측 U File에서
MM_Interface.er를 선택합니다. 마지막으로 왼쪽 화살표를 클릭한 후, 복사 진행 표시줄이 완료될 때까지 기다립니다.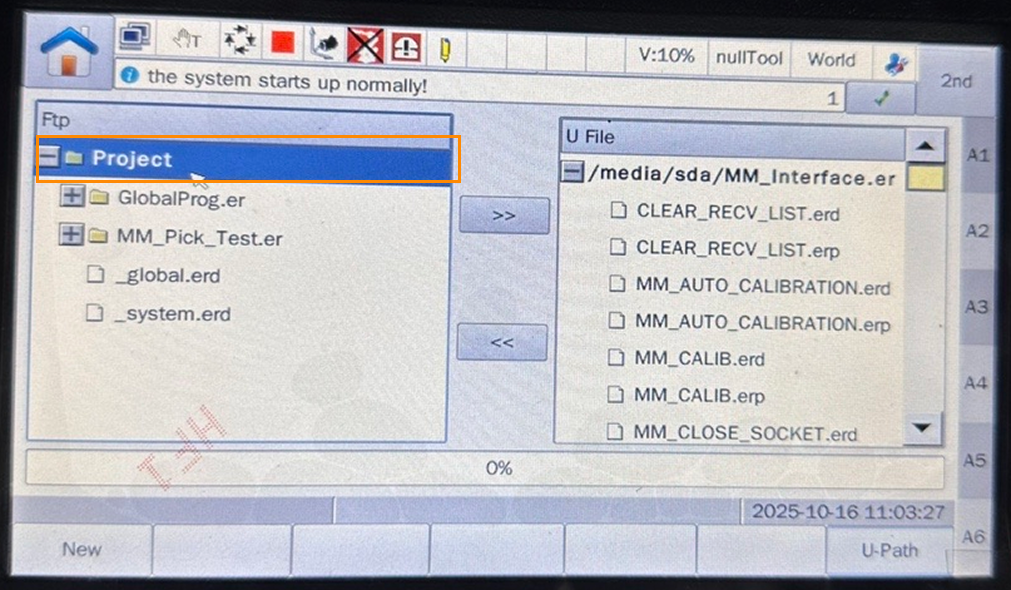
-
프로젝트 리스트에서
MM_Interface가 나타나면 플래싱 완료를 의미합니다.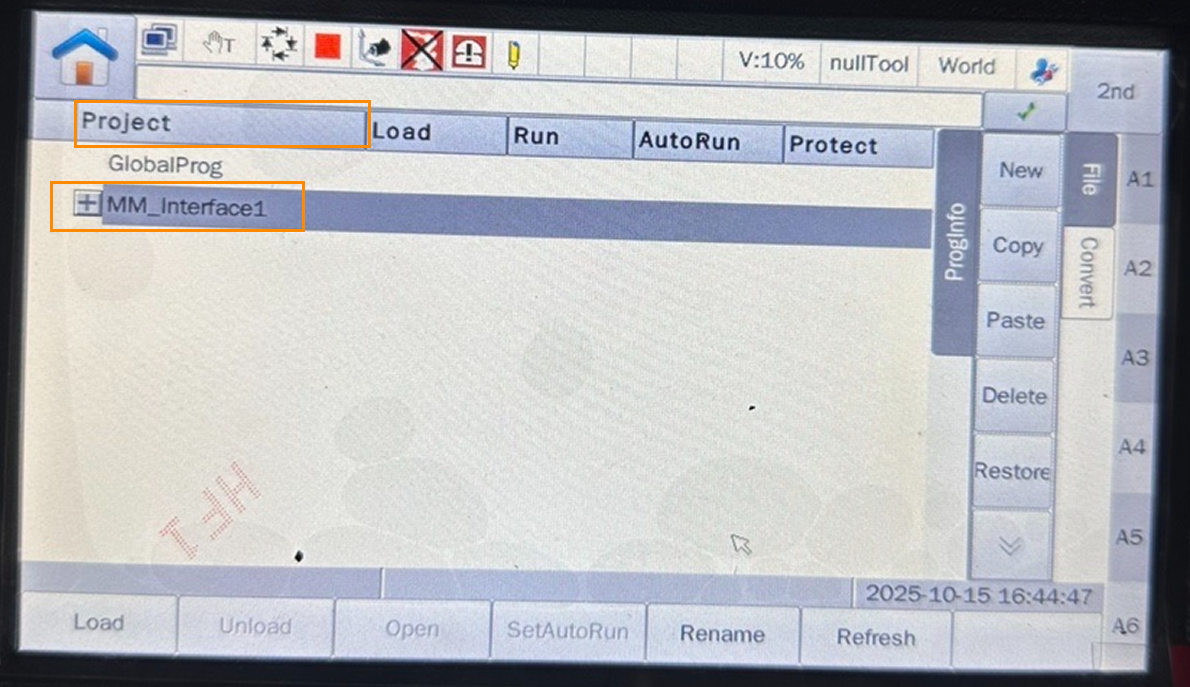
표준 인터페이스 통신 테스트
-
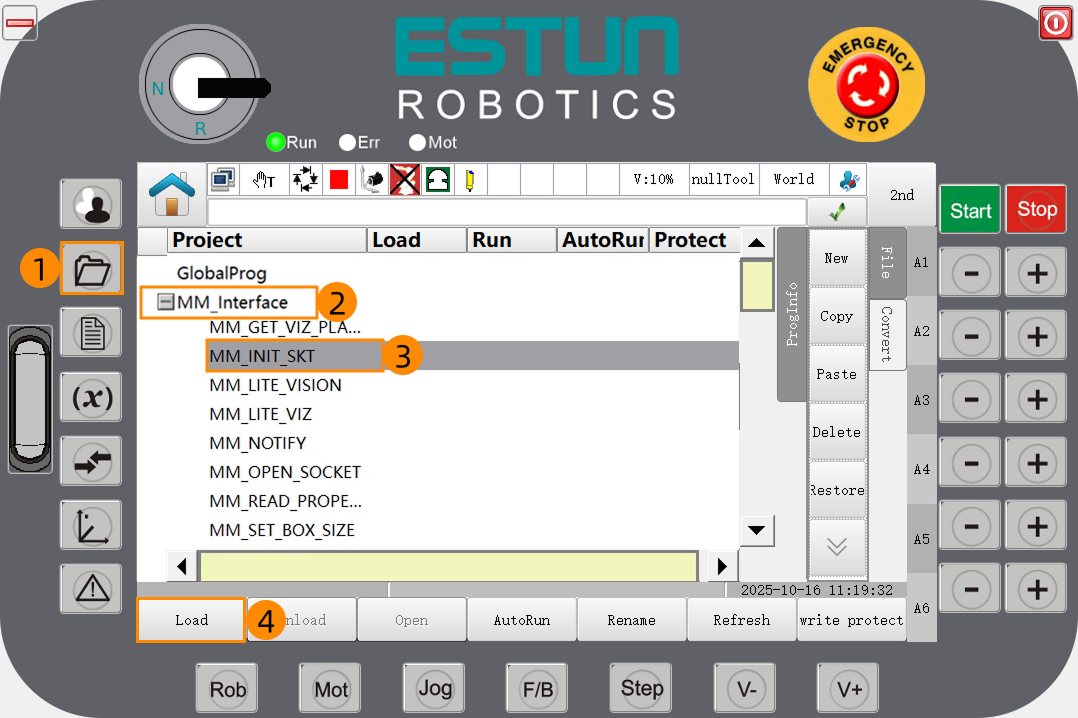
TEACH 모드에서 티치 펜던트의 폴더 버튼을 누르고 MM_Interface를 펼친 후 MM_INIT_SKT를 선택하고 Load를 클릭하면 프로그램 파일이 열립니다.
-
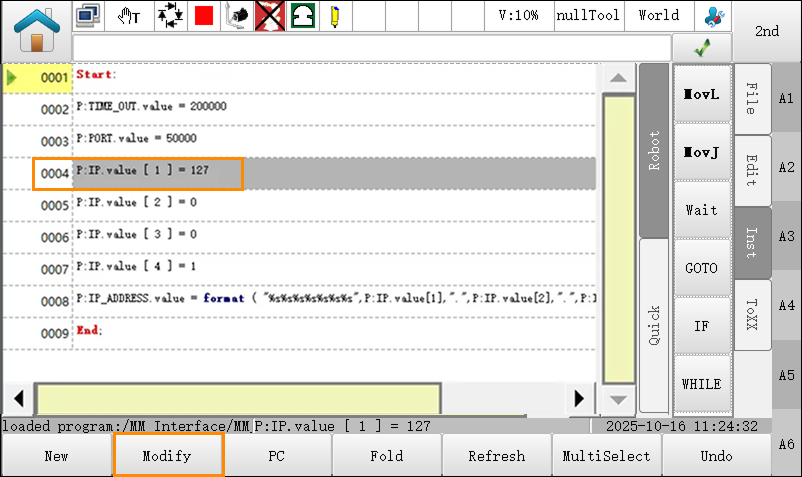
열린 프로그램 파일에서 3번째 줄의 P:PORT.value 값(해당 값은 Mech-Vision 소프트웨어에서 설정한 호스트 포트 번호와 일치해야 함)을 확인합니다. 4~7번째 줄의 P:IP.value[1] ~ P:IP.value[4] 값(이 네 개의 값은 IPC의 IP 주소를 구성하는 네 그룹의 숫자와 각각 일치해야 함)을 확인합니다.
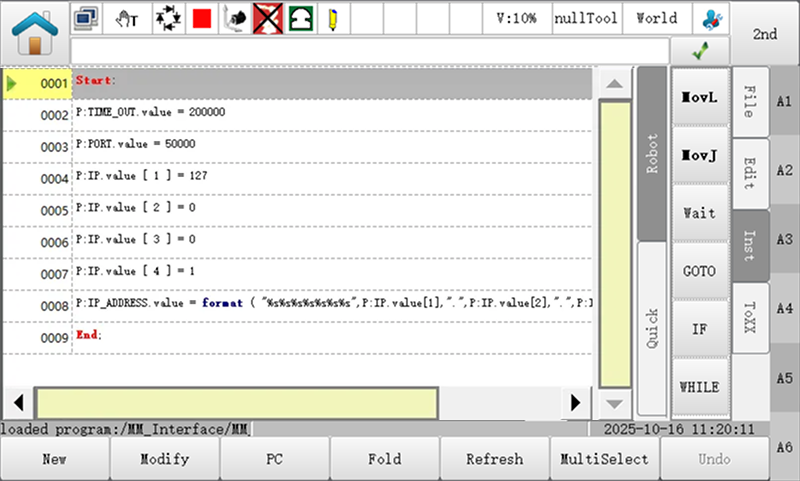
위의 값을 수정하려면 다음 작동 방법을 참조하십시오. 아래에서는 4번째 행을 예로 들어, 127을 192로 수정하는 방법을 설명합니다.
-
4번째 행을 선택하여 Modify 클릭하십시오.
-
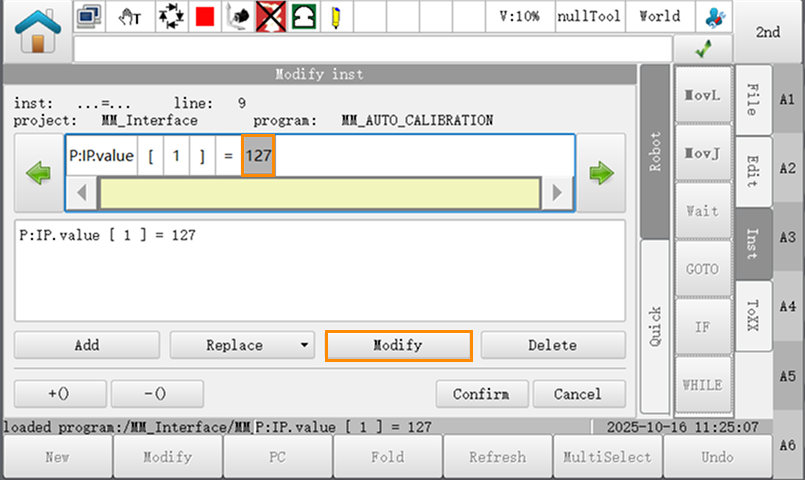
127에 커서를 놓고 Modify를 클릭하십시오.
-
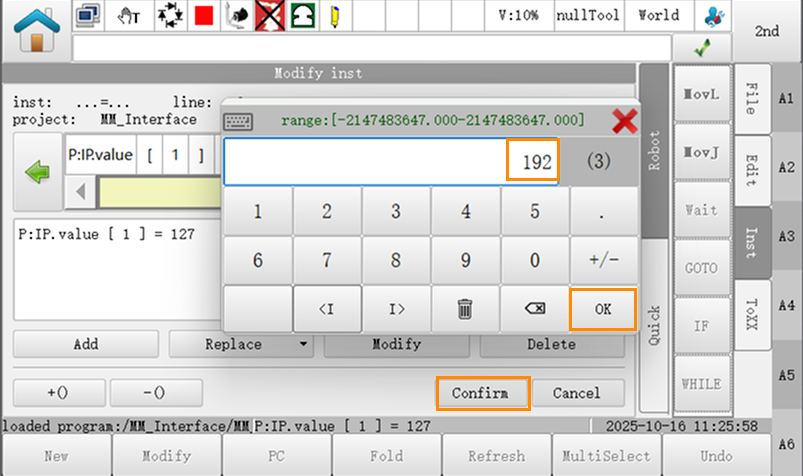
192를 입력한 다음 차례로 버튼을 클릭하십시오.
-
-
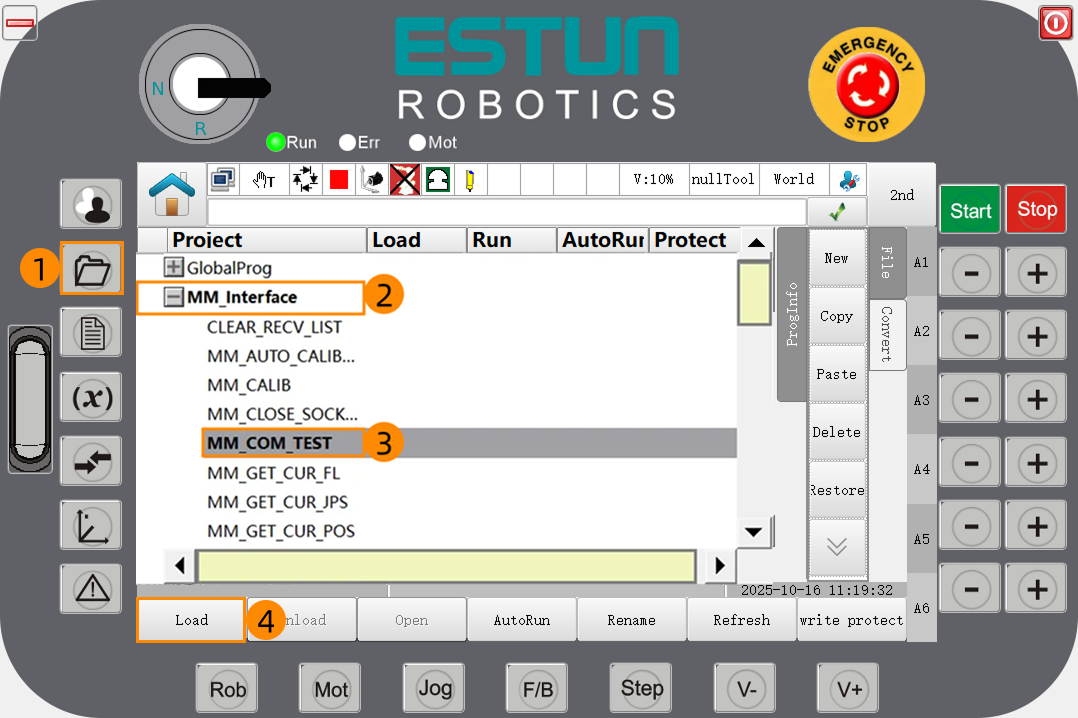
티치 펜던트의 폴더 버튼을 누르고 프로젝트 리스트 화면으로 들어가서 MM_Interface를 펼친 후 MM_COM_TEST를 선택하고 Load를 클릭하면 프로그램 파일이 열립니다.
-
티치 펜던트에 있는 키를 A 방향으로 회전하고 자동 모드로 전환합니다.

-
Step 버튼 (아래 그림 위치 1)을 누르고, 프로그램이 연속 실행 상태(아래 그림 위치 2)에 있는지 확인합니다.
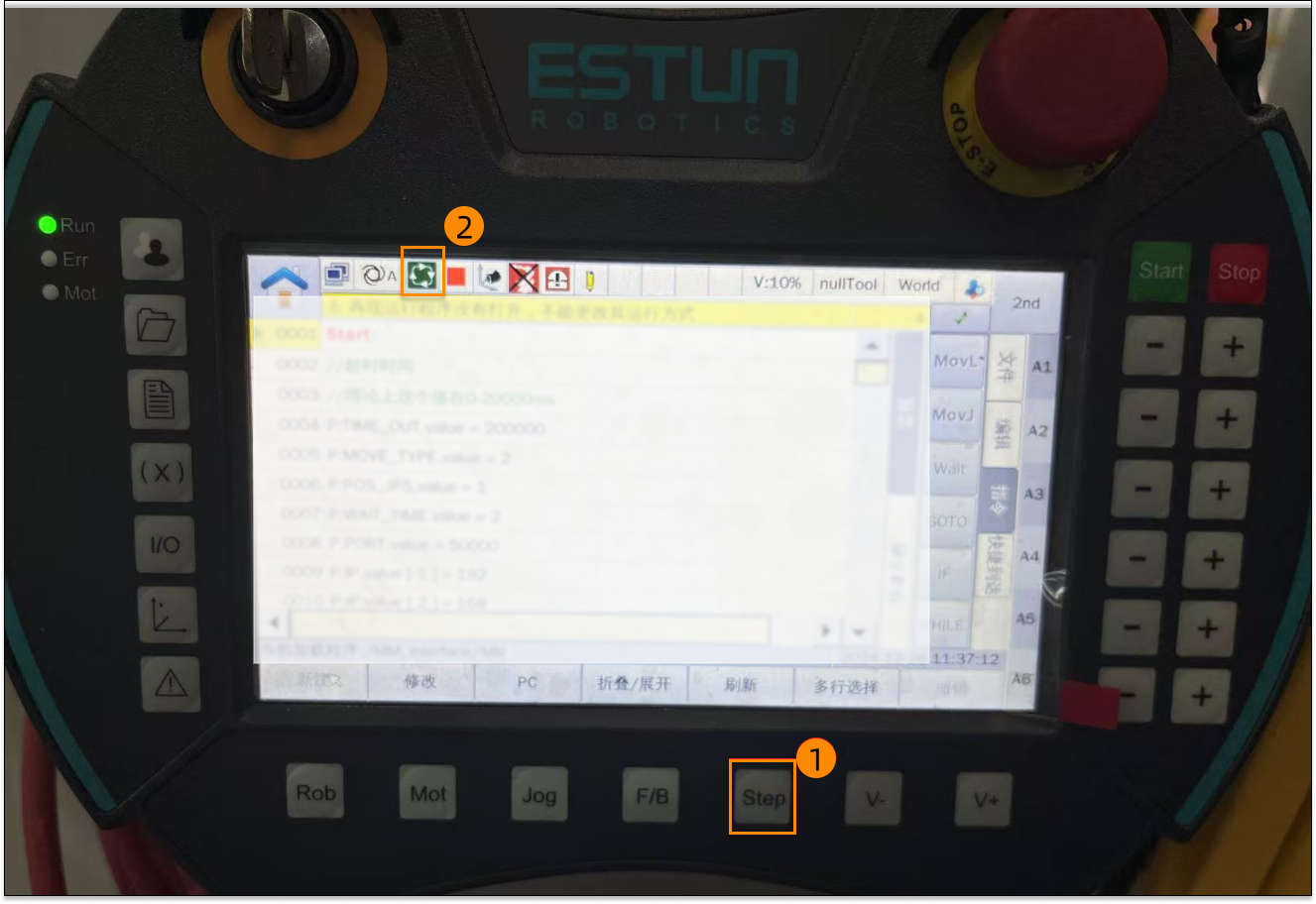
-
Mot 버튼(아래 그림 위치 1)을 누르고, Enable 지시등(아래 그림 위치 2)이 켜진 상태인지 확인합니다.
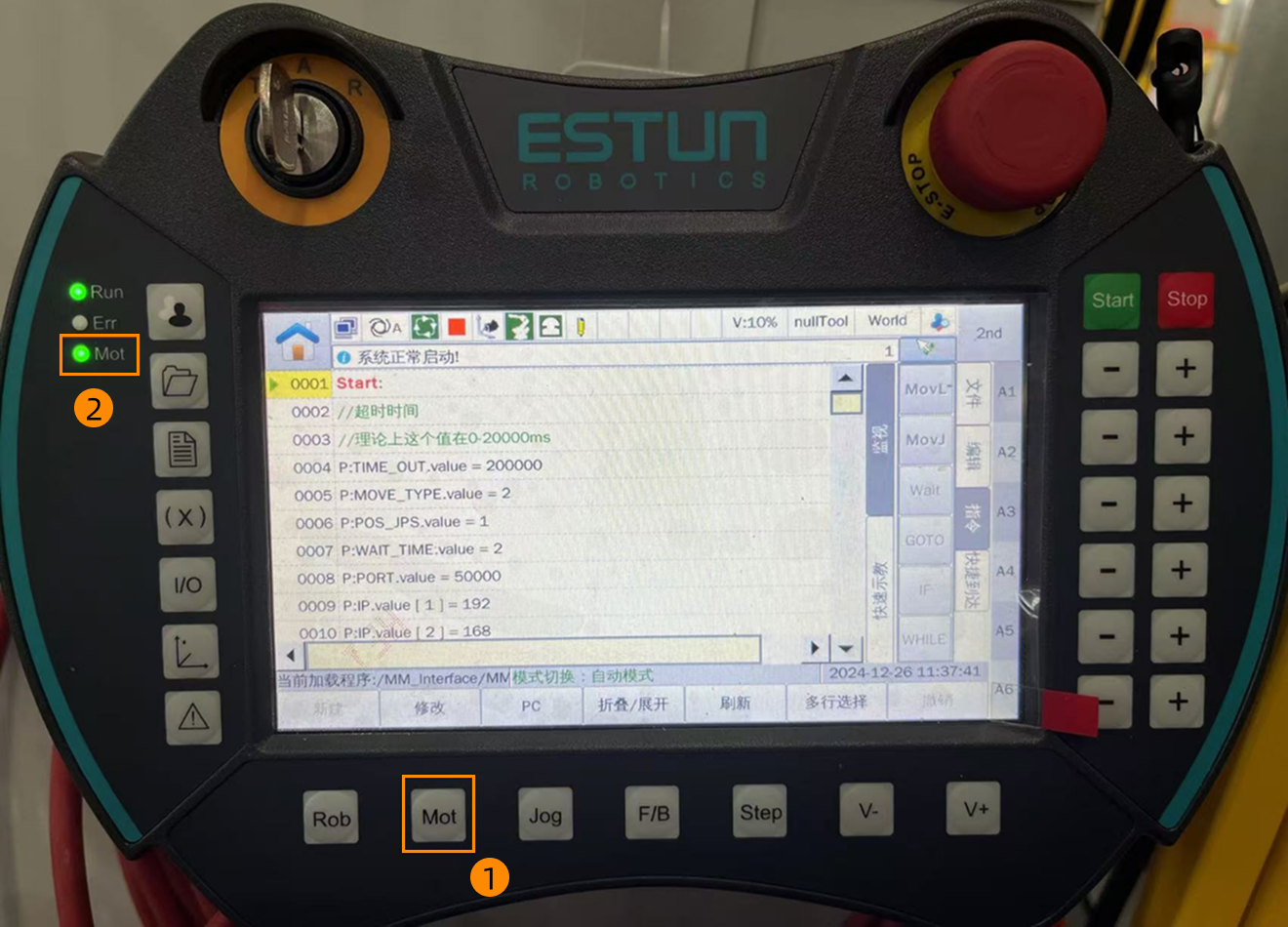
-
Start 버튼을 클릭하여 프로그램을 실행합니다. Stop 버튼을 클릭하여 프로그램을 정지합니다.

-
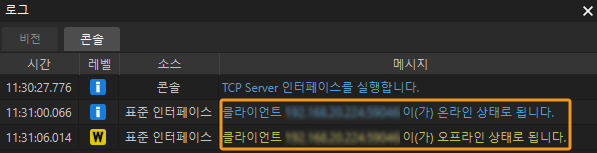
로봇과 비전 시스템 간의 통신 연결이 성공하면 Mech-Vision 로그 창의 콘솔 탭에 관련 메시지가 나타납니다.