샘플 프로그램21: MM_S21_Vis_As_Uframe
프로그램 소개
기능 설명 |
로봇이 Mech-Vision 프로젝트를 트리거하여 비전 결과를 획득합니다. 획득한 비전 결과를 사용자 좌표계로 사용하여 피킹 및 배치 동작을 수행합니다. |
파일 경로 |
Mech-Vision 및 Mech-Viz의 설치 디렉터리로 이동하여 |
필요한 프로젝트 |
Mech-Vision 프로젝트 |
사용 전제 조건 |
|
| 이 샘플 프로그램은 참고용으로 제공됩니다. 사용자는 실제 상황에 맞춰 이 내용을 바탕으로 수정해야 하며, 해당 프로그램을 그대로 사용하지 않도록 하십시오. |
프로그램 설명
다음은 MM_S21_Vis_As_Uframe 샘플 프로그램의 코드와 관련 설명입니다.
| MM_S1_Vis_Basic 샘플과 비교하면, 본 샘플은 비전 결과를 사용자 좌표계(예: 대상 물체 좌표계)로 사용하여 피킹을 수행합니다. 따라서 MM_S1_Vis_Basic과 일치하는 부분은 다시 설명하지 않습니다. (일치하는 부분에 대한 정보는 MM_S1_Vis_Basic 샘플 프로그램 설명을 참조하십시오). |
&ACCESS RVO
&REL 20
&PARAM DISKPATH = KRC:\R1\KUKA_MM\sample
DEF MM_S21_Vis_As_Uframe ( )
;---------------------------------------------------
; FUNCTION: trigger Mech-Vision project and get
; vision result
; Mech-Mind, 2026-12-29
;---------------------------------------------------
;set current tool no. to 1
BAS(#TOOL,1)
;set current base no. to 0
BAS(#BASE,0)
;move to robot home position
;FOLD PTP HOME Vel=100 % DEFAULT;%{PE}%R 8.3.44,%MKUKATPBASIS,%CMOVE,%VPTP,%P 1:PTP, 2:HOME, 3:, 5:100, 7:DEFAULT
$BWDSTART=FALSE
PDAT_ACT=PDEFAULT
FDAT_ACT=FHOME
BAS(#PTP_PARAMS,100)
$H_POS=XHOME
PTP XHOME
;ENDFOLD
;initialize communication parameters (initialization is required only once)
MM_Init_Socket("XML_Kuka_MMIND",873,871,60)
;move to image-capturing position
;FOLD LIN camera_capture Vel=1 m/s CPDAT1 Tool[1] Base[0] ;%{PE}
;FOLD Parameters ;%{h}
;Params IlfProvider=kukaroboter.basistech.inlineforms.movement.old; Kuka.IsGlobalPoint=False; Kuka.PointName=camera_capture; Kuka.BlendingEnabled=False; Kuka.MoveDataName=CPDAT4; Kuka.VelocityPath=1; Kuka.CurrentCDSetIndex=0; Kuka.MovementParameterFieldEnabled=True; IlfCommand=LIN
;ENDFOLD
$BWDSTART = FALSE
LDAT_ACT = LCPDAT1
FDAT_ACT = Fcamera_capture
BAS(#CP_PARAMS, 1.0)
LIN Xcamera_capture
;ENDFOLD
;trigger NO.1 Mech-Vision project
MM_Start_Vis(1,0,2,init_jps,status)
IF status <> 1102 THEN
;add error handling logic here according to different error codes
MM_LOG("Status ERROR")
HALT
ENDIF
;get vision result from NO.1 Mech-Vision project
MM_Get_VisData(1,pos_num,status)
;check whether vision result has been got from Mech-Vision successfully
IF status<> 1100 THEN
;add error handling logic here according to different error codes
;e.g.: status=1003 means no point cloud in ROI
;e.g.: status=1002 means no vision result
halt
ENDIF
;save first base point data to local variables
MM_Get_Pose(1,XWobjpoint,label,toolid)
;Convert the visual points to the workpiece coordinates
BASE_DATA[10]=XWobjpoint
;calculate pick approach point based on pick point
tool_offset={X 0,Y 0,Z -100,A 0,B 0,C 0}
Xpick_app=Xpick_point:tool_offset
;move to intermediate waypoint of picking
;FOLD PTP pick_waypoint CONT Vel=50 % PDAT1 Tool[1] Base[0];%{PE}
;FOLD Parameters ;%{h}
;Params IlfProvider=kukaroboter.basistech.inlineforms.movement.old; Kuka.IsGlobalPoint=False; Kuka.PointName=pick_waypoint; Kuka.BlendingEnabled=True; Kuka.MoveDataPtpName=PDAT1; Kuka.VelocityPtp=50; Kuka.CurrentCDSetIndex=0; Kuka.MovementParameterFieldEnabled=True; IlfCommand=PTP
;ENDFOLD
$BWDSTART = FALSE
PDAT_ACT = PPDAT1
FDAT_ACT = Fpick_waypoint
BAS(#PTP_PARAMS, 50.0)
PTP Xpick_waypoint C_Dis
;ENDFOLD
;move to approach waypoint of picking
;FOLD LIN pick_app Vel=1 m/s CPDAT2 Tool[1]:Tool1 Base[10] ;%{PE}
;FOLD Parameters ;%{h}
;Params IlfProvider=kukaroboter.basistech.inlineforms.movement.old; Kuka.IsGlobalPoint=False; Kuka.PointName=pick_app; Kuka.BlendingEnabled=False; Kuka.MoveDataName=CPDAT2; Kuka.VelocityPath=1; Kuka.CurrentCDSetIndex=0; Kuka.MovementParameterFieldEnabled=True; IlfCommand=LIN
;ENDFOLD
$BWDSTART = FALSE
LDAT_ACT = LCPDAT2
FDAT_ACT = Fpick_app
BAS(#CP_PARAMS, 1.0)
SET_CD_PARAMS (0)
LIN Xpick_app
;ENDFOLD
;move to picking waypoint
;FOLD LIN pick_point Vel=0.3 m/s CPDAT3 Tool[1]:Tool1 Base[10] ;%{PE}
;FOLD Parameters ;%{h}
;Params IlfProvider=kukaroboter.basistech.inlineforms.movement.old; Kuka.IsGlobalPoint=False; Kuka.PointName=pick_point; Kuka.BlendingEnabled=False; Kuka.MoveDataName=CPDAT3; Kuka.VelocityPath=0.3; Kuka.CurrentCDSetIndex=0; Kuka.MovementParameterFieldEnabled=True; IlfCommand=LIN
;ENDFOLD
$BWDSTART = FALSE
LDAT_ACT = LCPDAT3
FDAT_ACT = Fpick_point
BAS(#CP_PARAMS, 0.3)
SET_CD_PARAMS (0)
LIN Xpick_point
;ENDFOLD
;add object grasping logic here, such as "$OUT[1]=TRUE"
halt
;move to departure waypoint of picking
;FOLD LIN pick_app Vel=1 m/s CPDAT2 Tool[1]:Tool1 Base[10] ;%{PE}
;FOLD Parameters ;%{h}
;Params IlfProvider=kukaroboter.basistech.inlineforms.movement.old; Kuka.IsGlobalPoint=False; Kuka.PointName=pick_app; Kuka.BlendingEnabled=False; Kuka.MoveDataName=CPDAT2; Kuka.VelocityPath=1; Kuka.CurrentCDSetIndex=0; Kuka.MovementParameterFieldEnabled=True; IlfCommand=LIN
;ENDFOLD
$BWDSTART = FALSE
LDAT_ACT = LCPDAT2
FDAT_ACT = Fpick_app
BAS(#CP_PARAMS, 1.0)
SET_CD_PARAMS (0)
LIN Xpick_app
;ENDFOLD
;move to intermediate waypoint of placing
;FOLD PTP drop_waypoint CONT Vel=100 % PDAT2 Tool[1] Base[0];%{PE}
;FOLD Parameters ;%{h}
;Params IlfProvider=kukaroboter.basistech.inlineforms.movement.old; Kuka.IsGlobalPoint=False; Kuka.PointName=drop_waypoint; Kuka.BlendingEnabled=True; Kuka.MoveDataPtpName=PDAT2; Kuka.VelocityPtp=100; Kuka.CurrentCDSetIndex=0; Kuka.MovementParameterFieldEnabled=True; IlfCommand=PTP
;ENDFOLD
$BWDSTART = FALSE
PDAT_ACT = PPDAT2
FDAT_ACT = Fdrop_waypoint
BAS(#PTP_PARAMS, 100.0)
PTP Xdrop_waypoint C_Dis
;ENDFOLD
;move to approach waypoint of placing
;FOLD LIN drop_app Vel=1 m/s CPDAT4 Tool[1]:Tool1 Base[1] ;%{PE}
;FOLD Parameters ;%{h}
;Params IlfProvider=kukaroboter.basistech.inlineforms.movement.old; Kuka.IsGlobalPoint=False; Kuka.PointName=drop_app; Kuka.BlendingEnabled=False; Kuka.MoveDataName=CPDAT4; Kuka.VelocityPath=1; Kuka.CurrentCDSetIndex=0; Kuka.MovementParameterFieldEnabled=True; IlfCommand=LIN
;ENDFOLD
$BWDSTART = FALSE
LDAT_ACT = LCPDAT4
FDAT_ACT = Fdrop_app
BAS(#CP_PARAMS, 1.0)
SET_CD_PARAMS (0)
LIN Xdrop_app
;ENDFOLD
;move to placing waypoint
;FOLD LIN drop Vel=0.3 m/s CPDAT5 Tool[1]:Tool1 Base[1] ;%{PE}
;FOLD Parameters ;%{h}
;Params IlfProvider=kukaroboter.basistech.inlineforms.movement.old; Kuka.IsGlobalPoint=False; Kuka.PointName=drop; Kuka.BlendingEnabled=False; Kuka.MoveDataName=CPDAT5; Kuka.VelocityPath=0.3; Kuka.CurrentCDSetIndex=0; Kuka.MovementParameterFieldEnabled=True; IlfCommand=LIN
;ENDFOLD
$BWDSTART = FALSE
LDAT_ACT = LCPDAT5
FDAT_ACT = Fdrop
BAS(#CP_PARAMS, 0.3)
SET_CD_PARAMS (0)
LIN Xdrop
;ENDFOLD
;add object releasing logic here, such as "$OUT[1]=FALSE"
halt
;move to departure waypoint of placing
;FOLD LIN drop_app Vel=1 m/s CPDAT4 Tool[1]:Tool1 Base[1] ;%{PE}
;FOLD Parameters ;%{h}
;Params IlfProvider=kukaroboter.basistech.inlineforms.movement.old; Kuka.IsGlobalPoint=False; Kuka.PointName=drop_app; Kuka.BlendingEnabled=False; Kuka.MoveDataName=CPDAT4; Kuka.VelocityPath=1; Kuka.CurrentCDSetIndex=0; Kuka.MovementParameterFieldEnabled=True; IlfCommand=LIN
;ENDFOLD
$BWDSTART = FALSE
LDAT_ACT = LCPDAT4
FDAT_ACT = Fdrop_app
BAS(#CP_PARAMS, 1.0)
LIN Xdrop_app
;ENDFOLD
;move back to robot home position
;FOLD PTP HOME Vel=100 % DEFAULT;%{PE}%R 8.3.44,%MKUKATPBASIS,%CMOVE,%VPTP,%P 1:PTP, 2:HOME, 3:, 5:100, 7:DEFAULT
$BWDSTART=FALSE
PDAT_ACT=PDEFAULT
FDAT_ACT=FHOME
BAS(#PTP_PARAMS,100)
$H_POS=XHOME
PTP XHOME
;ENDFOLD
END위 샘플 프로그램 코드에 해당하는 워크플로는 아래 그림에 표시되어 있습니다.
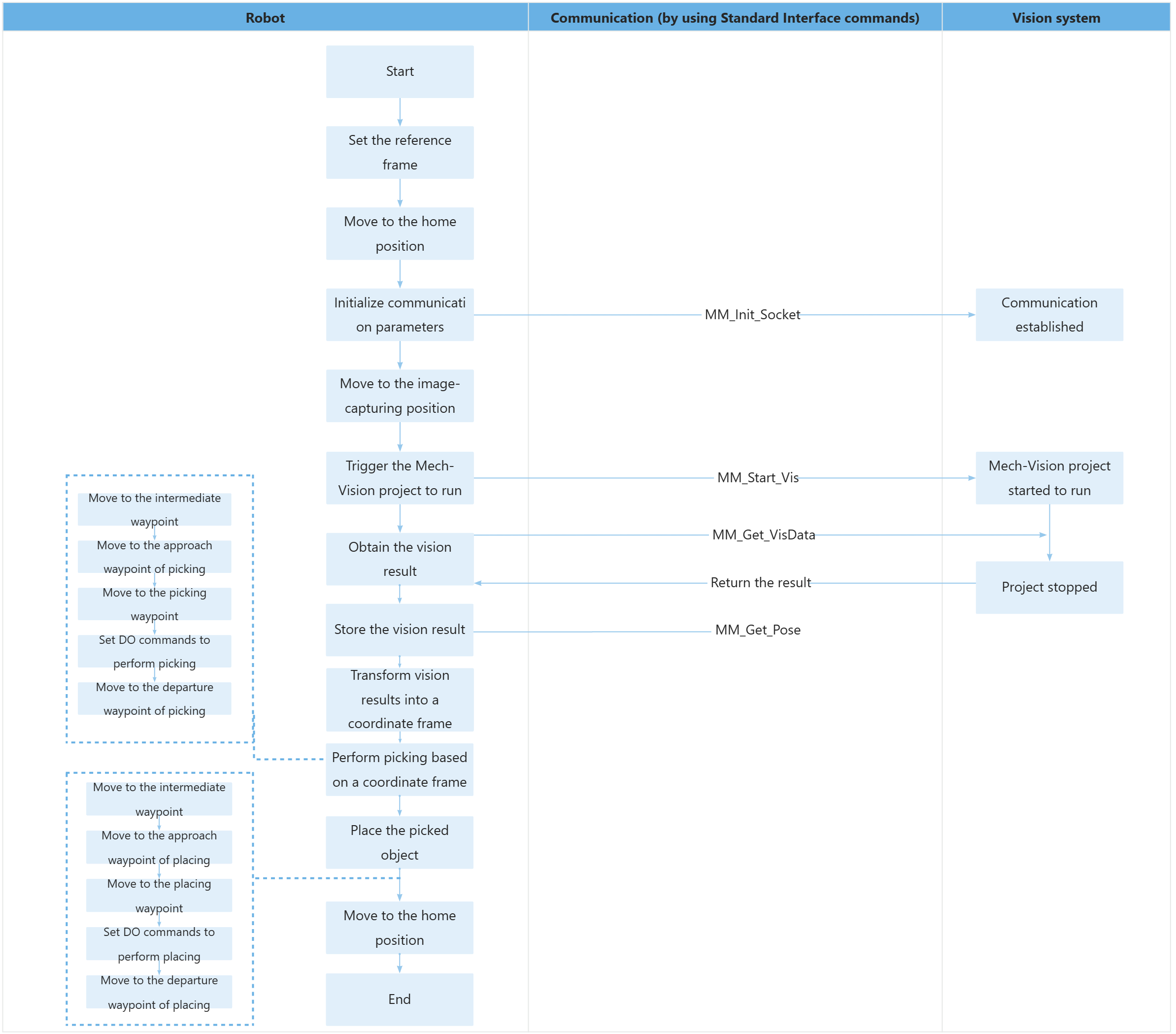
아래 표는 새롭게 추가된 기능의 설명입니다. 명령어 이름의 링크를 클릭하면 해당 명령의 상세 설명을 확인할 수 있습니다.
| 워크플로 | 코드와 설명 | ||
|---|---|---|---|
비전 포인트의 TCP 포즈를 사용자 좌표계로 설정하기 |
|
||
피킹 및 배치를 수행하기 |
|