왜 마스터 컨트롤 통신에서 ABB 로봇이 가끔 DO/DI를 조기에 활성화하거나 비활성화합니까?
문제 설명
마스터 컨트롤 통신에서 ABB 로봇이 가끔 목표점으로 이동하기 전에 DO/DI를 활성화하거나 비활성화합니다.
원인 분석
이것은 사용자가 먼저 티치 펜던트의 정지 버튼을 눌러(이때 포그라운드 프로그램은 정지되지만 재설정되지 않음), 그 후 Mech-Viz 프로젝트를 정지시킨 경우일 수 있습니다(이때 백그라운드 프로그램은 정지되며 재설정됨). 이로 인해 포그라운드 프로그램이 재설정되지 않습니다. 다음에 계속 실행할 때, 포그라운드 프로그램이 이전에 전송된 이동 위치를 초기화하지 않으면 이동이 혼란스러워질 수 있으므로, 포그라운드 프로그램이 정지된 상태에서는 명령어를 보내지 마십시오.
해결 방법
Mech-Viz 프로젝트를 실행하기 전에 ABB 로봇 포그라운드 프로그램을 미리 재설정하십시오. 구체적인 작업은 다음과 같습니다.
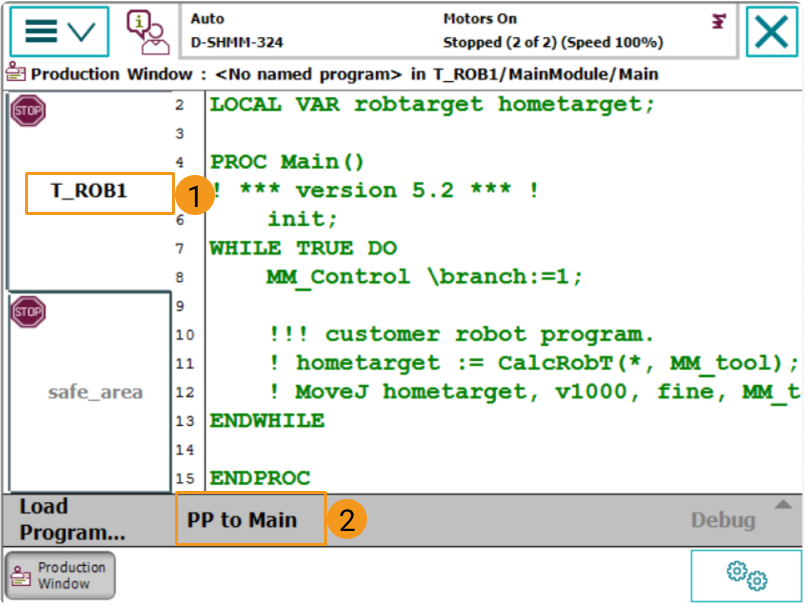
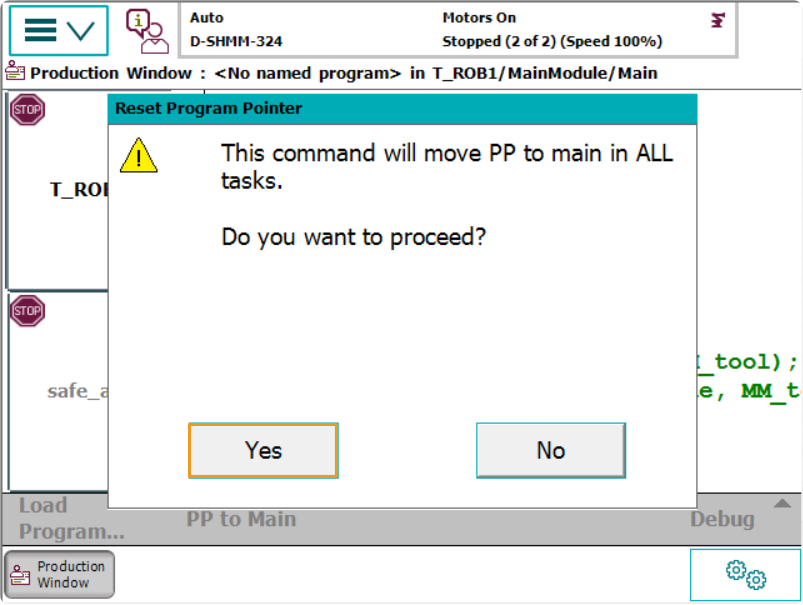
T_ROB1의 프로그램 포인터를 메인 프로그램으로 이동하고 PP를 메인으로 이동 버튼을 클릭하고 팝업된 프롬프트 박스에서 예를 클릭하십시오.