표준 인터페이스 상태 코드 및 오류 분석
개요
표준 인터페이스 명령의 반환 결과에서 상태 코드는 명령 실행을 나타내는 데 사용되는 4자리 숫자 코드입니다. 상태 코드는 정상적인 상태 코드(명령어가 정상적으로 실행됨)와 오류 상태 코드(명령어가 비정상적으로 실행됨)로 분류됩니다. 오류 상태 코드의 경우, 사용자는 본문의 가이드를 참조하여 오류를 처리할 수 있습니다. 상태 코드는 디음과 같이 세부적으로 분류될 수 있습니다.
| 상태 코드 | 설명 |
|---|---|
1001~1099 |
|
1100~1199 |
|
2001~2099 |
|
2100~2199 |
|
3001~3099 |
|
3100~3199 |
|
4001~4099 |
|
4100~4199 |
로봇 관련 정상적인 상태 코드 |
7001~7099 |
|
6001~6199 |
사용자는 Mech-Vision에서 사용자 자체 정의한 상태 코드 |
7100~7199 |
Mech-Vision
Mech-Vision관련 오류 상태 코드
| 오류 상태 코드 | 설명 |
|---|---|
Mech-Vision: 프로그램에 등록되지 않은 프로젝트가 있음 |
|
Mech-Vision: 비전 결과가 없음 |
|
Mech-Vision: ROI에 포인트 클라우드가 없음 |
|
Mech-Vision: 프로젝트를 트리거한 명령어에서 무효한 파라미터가 있음 |
|
Mech-Vision: 무효한 포즈 데이터 |
|
Mech-Vision: 프로젝트 운영 중 |
|
Mech-Vision: 숫자 출력 신호 목록이 제공되지 않았음 |
|
Mech-Vision: 포즈 수량이 레이블 수량과 불이치함 |
|
Mech-Vision: 프로젝트 번호가 없음 |
|
Mech-Vision: 파라미터 레시피 번호가 없음 |
|
Mech-Vision 파라미터 레시피가 설정되지 않았음 |
|
Mech-Vision: 파라미터 레시피 전환 실패 |
|
Mech-Vision: 프로젝트 실행 중 오류 발생 |
|
Mech-Vision: 명령어로 얻은 데이터가 "출력" 스텝의 "포트 유형" 파라미터 값과 일치하지 않았음 |
|
Mech-Vision: 문자열 레이블이 숫자로 전환 실패 |
|
Mech-Vision: 무효한 비전 포인트 수량 |
|
Mech-Vision: 실행 시 제한 시간 초과 |
|
Mech-Vision: 프로젝트가 시작되지 않았음 |
|
Mech-Vision: 물체 치수 설정 실패 |
|
Mech-Vision: 무효한 물체 치수 |
|
Mech-Vision: 카메라 연결 실패 |
|
Mech-Vision: 포즈 목록 크기가 사용자 자체 정의 데이터 목록 크기와 동일하지 않음 |
|
Mech-Vision: 가상 이미지 데이터를 사용 중이며 현재 실행하지 않음 |
|
Mech-Vision: 무효한 포즈 유형 |
|
Mech-Vision: '경로 계획' 스텝 실행 실패 |
|
Mech-Vision: 로봇이 웨이 포인트에 도달할 수 없었음 |
|
Mech-Vision: 싱귤래리티가 감지되었음 |
|
Mech-Vision: 무효한 픽 포인트 |
|
Mech-Vision: 로봇 충돌이 감지되었음 |
|
Mech-Vision: 적당한 팔레타이징을 위한 배치 위치가 없음 |
|
Mech-Vision: '비전 이동' 스텝이 비전 포즈를 수신하지 않았음 |
|
Mech-Vision: 무효한 말단장치 |
|
Mech-Vision: 캡처 완료를 기다릴 때 시간 초과 |
|
Mech-Vision: 박스 마스크 오류 인식 |
|
Mech-Vision: 상자 치수 오류 인식 |
|
Mech-Vision: 포즈 설정 실패 |
|
Mech-Vision: 성명/ 전역 변수 획득 실패 |
|
Mech-Vision: 모드 전환 명령 호출에 실패 |
Mech-Vision관련 정상적인 상태 코드
| 정상적인 상태 코드 | 설명 |
|---|---|
1100 |
Mech-Vision: 비전 결과 획득 성공 |
1101 |
Mech-Vision: 준비되어 있음 |
1102 |
Mech-Vision: 프로젝트 성공적으로 트리거했음 |
1103 |
Mech-Vision: 계획된 경로를 성공적으로 획득했음 |
1106 |
Mech-Vision: 숫자 출력 신호 목록을 성공적으로 획득했음 |
1107 |
Mech-Vision: 파라미터 레시피를 성공적으로 전환했음 |
1108 |
Mech-Vision: 물체 치수를 성공적으로 설정했음 |
1110 |
Mech-Vision: 포즈 설정 성공 |
Mech-Viz
Mech-Viz관련 오류 상태 코드
| 오류 상태 코드 | 설명 |
|---|---|
Mech-Viz: 소프트웨어가 등록되지 않았음 |
|
Mech-Viz: 프로젝트 운영 중 |
|
Mech-Viz: 로봇이 웨이 포인트에 도달할 수 없음 |
|
Mech-Viz: Mech-Viz를 트리거한 명령어에서 무효한 파라미터가 있음 |
|
Mech-Viz: 실행 중 오류 발생 |
|
Mech-Viz: 숫자 출력 신호 목록이 제공되지 않았음 |
|
Mech-Viz: 무효한 포즈 유형 |
|
Mech-Viz: 무효한 포즈 데이터 |
|
Mech-Viz: 프로젝트가 자동 로드로 설정되지 않았음 |
|
Mech-Viz: 프로젝트 열려 있지 않음 |
|
Mech-Viz: 스텝 파라미터 설정 실패 |
|
Mech-Viz: 실행 정지 실패 |
|
Mech-Viz: 무효한 분기 아웃 포트 번호 |
|
Mech-Viz: 분기 설정 실패 |
|
Mech-Viz: 싱귤래리티가 감지되었음 |
|
Mech-Viz: 프로젝트가 실행되지 않거나 결과 없이 실행되었음 |
|
Mech-Viz: 무효한 분기 스텝 번호 |
|
Mech-Viz: 실행 시 제한 시간 초과 |
|
Mech-Viz: 무효한 인덱스 스텝 번호 |
|
Mech-Viz: 무효한 인덱스 값 |
|
Mech-Viz: 인덱스 설정 실패 |
|
Mech-Viz: 무효한 픽 포인트 |
|
Mech-Viz: 로봇 충돌이 감지되었음 |
|
Mech-Viz: 적당한 팔레타이징을 위한 배치 위치가 없음 |
|
Mech-Viz: '비전 인식' 스텝이 호출되지 않았음 |
|
Mech-Viz: 비전 서비스가 비전 결과를 출력하지 않았음 |
|
Mech-Viz: ROI에 포인트 클라우드가 없음 |
|
Mech-Viz: '비전 이동' 스텝이 비전 포즈를 수신하지 않았음 |
|
Mech-Viz: 스텝 파라미터 값 획득 실패 |
|
Mech-Viz: 비전 이동의 계획 결과 획득 실패 |
|
Mech-Viz: 사용자 자체 정의 데이터 획득 실패 |
|
Mech-Viz: 비전 서비스가 등록되지 않았음 |
|
Mech-Viz: 무효한 말단장치 |
|
Mech-Viz: 상자 치수 오류 인식 |
Mech-Viz관련 정상적인 상태 코드
| 정상적인 상태 코드 | 설명 |
|---|---|
2100 |
Mech-Viz: 실행 성공 |
2102 |
Mech-Viz: 숫자 출력 신호 목록을 성공적으로 획득했음 |
2103 |
Mech-Viz: 성공적으로 시작되었음 |
2104 |
Mech-Viz: 성공적으로 정지되었음 |
2105 |
Mech-Viz: 분기를 성공적으로 설정했음 |
2106 |
Mech-Viz: 인덱스를 성공적으로 설정했음 |
2107 |
Mech-Viz: ‘외부 이동’ 스텝의 이동 지점을 성공적으로 설정했음 |
2108 |
Mech-Viz: 스텝의 파라미터 값을 성공적으로 설정했음 |
2109 |
Mech-Viz: 스텝의 파라미터 값을 성공적으로 읽어냈음 |
통신 컴포넌트
캘리브레이션
Mech-Vision 오류 분석
1001
Mech-Vision: 프로그램에 등록되지 않은 프로젝트가 있음
오류 원인:
-
Mech-Vision소프트웨어가 시작되지 않았습니다.
해결 방법:
-
Mech-Vision소프트웨어가 열려 있는지 확인하십시오.
1002
Mech-Vision: 비전 결과가 없음
오류 원인:
-
Mech-Vision 프로젝트를 성공적으로 실행한 후에 ‘출력’ 스텝의 포트 데이터가 비어 있습니다. 인스턴스 세그먼테이션의 믿음도 역치가 너무 높음, 시나리오에 매칭되는 물체가 없음, ROI 설정이 부적절함, 포인트 클라우드 품질이 좋지 않음, 필터링 설정이 부적절함 등 이유가 있습니다.
해결 방법:
-
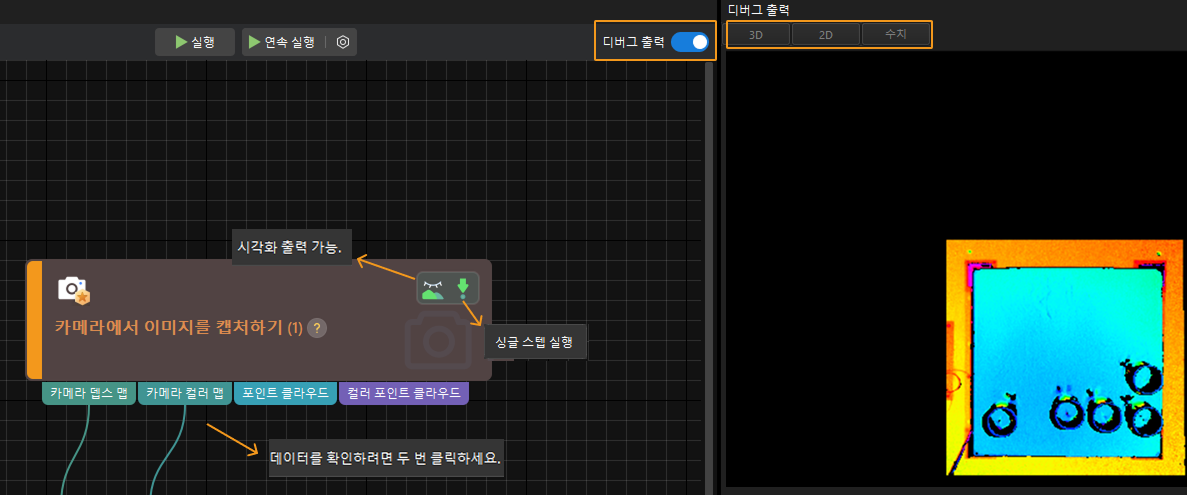
디버그 출력 활성화하기: Mech-Vision 소프트웨어를 열고 디버그 출력 스위치를 켜기로 설정한 후 실행 또는 싱글 스텝 실행을 클릭하고 그 다음 연결선을 더블 클릭하면 오른쪽 디버그 창에서 구체적인 출력을 확인할 수 있습니다.
-
문제가 발생한 스텝을 찾기: 첫 번째 스텝부터 시작하여 각 스텝의 각 포트의 데이터 스트림을 위에서 아래로 확인하십시오. 특정 스텝의 데이터 스트림에 문제가 발생하는 경우, 문제는 해당 스텝에서 찾을 수 있습니다.
-
문제가 있는 스텝의 파라미터를 확인하기: 모든 필수 스텝이 올바르게 구성되었고 데이터가 원활하게 흐르는지 확인하십시오.
다음 스텝의 파라미터는 출력 결과에 매우 중요하므로, 프로젝트에 다음 스텝이 있을 경우, 사용자는 해당 스텝의 파라미터 값을 특별히 주의해야 합니다.
-
3D ROI 내의 3D 포인트 클라우드를 추출하기: 3D ROI 설정에서 편집기를 열고 대상 물체의 포인트 클라우드가 녹색 박스 안에 있는지 확인하십시오.
-
3D 상세 매칭: 시각화 출력된 매칭 효과와 현장 상황에 따라 신뢰 임계값을 적절하게 조정합니다.
-
신뢰도 임계값을 너무 높게 설정(예: 0.9 이상)하면, 모델이 검출 결과를 매우 정확하게 맞출 때만 검출 대상을 유효 매칭으로 표시합니다. 이 경우 누락된 검출을 균형 있게 조정하기 위해 신뢰도 임계값을 0.5 또는 0.6으로 적절히 낮출 수 있습니다.
-
신뢰도 임계값을 조정해도 효과가 좋지 않으면, 모델 훈련을 개선하고 더 다양하고 도전적인 데이터 세트를 사용하여 인스턴스 세그먼테이션의 일반화를 강화해야 합니다.
-
-
1003
Mech-Vision: ROI에 포인트 클라우드가 없음
오류 원인:
-
3D ROI에 포인트 클라우드가 없습니다.
| 실제 프로젝트에서 이 오류를 기반으로 빈이 제자리에 있는지, 비어 있는지 등을 확인할 수 있습니다. 따라서 반드시 해결해야 할 오류는 아닙니다. |
해결 방법:
-
정확한 ROI를 위해 프로젝트에서의 ROI 설정을 확인하십시오.
1005
Mech-Vision: 프로젝트를 트리거한 명령어에서 무효한 파라미터가 있음
오류 원인:
-
‘Mech-Vision 프로젝트 실행’ 명령을 호출할 때 설정한 ‘로봇 포즈 유형’ 파라미터 값에 오류가 있습니다. ‘로봇 포즈 유형’의 파라미터 값 범위는 0에서 3까지입니다.
-
‘Mech-Vision 프로젝트 실행 및 결과 획득’ 명령을 호출할 때 설정한 ‘데이터 포맷 반환’ 파라미터 값에 오류가 있습니다. ‘데이터 포맷 반환’ 파라미터 값 범위는 1에서 4까지입니다.
해결 방법:
-
명령어에 설정된 파라미터 값이 값 범위 내에 있는지 확인합시오.
1006
Mech-Vision: 무효한 포즈 데이터
오류 원인:
-
‘Mech-Vision 프로젝트 실행’ 명령을 호출할 때 설정한 로봇 포즈 파라미터 값에 오류가 있습니다. 구체적인 오류는 다음과 같이 분류됩니다.
-
관절 각도 데이터가 6자리 미만입니다.
-
플랜지 포즈 데이터가 6자리 미만입니다.
-
플랜지 포즈 데이터가 모두 0입니다.
-
| 로봇은 기본적으로 6축 로봇으로 설정됩니다. 4축 또는 5축 로봇인 경우 0을 사용하여 포즈 데이터의 나머지 필드를 채우십시오. |
해결 방법:
-
명령어에서 설정한 로봇 포즈 파라미터 값이 올바른지 확인하십시오. 즉, 설정한 관절 각도나 플랜지 포즈 데이터가 정확한지 점검해야 합니다.
1007
Mech-Vision: 프로젝트 운영 중
오류 원인:
-
Mech-Vision 프로젝트가 실행되는 동안 클라이언트 프로그램은 ‘Mech-Vision 프로젝트 실행’ 명령을 다시 호출하여 동일한 Mech-Vision 프로젝트를 실행하려고 했습니다.
| Mech-Vision소프트웨어에서 동시에 여러 프로젝트를 실행할 수 있으나, 실행 중에 동일한 Mech-Vision 프로젝트를 반복적으로 시작할 수 없습니다. |
해결 방법:
-
클라이언트 프로그램에서 설정한 Mech-Vision 프로젝트 번호가 정확한지 확인하십시오.
-
클라이언트 프로그램에서 단기간 내에 동일한 Mech-Vision 프로젝트가 다시 시작되지 않도록 확인하십시오. 같은 프로젝트를 실행할 때 클라이언트는 해당 프로젝트 실행이 끝날 때까지 기다려야 이 프로젝트를 다시 실행할 수 있습니다. (Mech-Vision 소프트웨어 로그 창의 비전 탭에서 '프로젝트 실행 종료' 메시지가 표시됩니다.) 이렇게 하면 오류가 발생하지 않습니다.
1008
Mech-Vision: 숫자 출력 신호 목록이 제공되지 않았음
오류 원인:
-
획득한 Mech-Vision진공 그리퍼의 DO 신호가 비어 있습니다.
해결 방법:
-
경로 계획 도구에서 최종 말단장치 유형에 디팔레타이징 진공 그리퍼가 선택되어 있고 디팔레타이징 진공 그리퍼 구성기에서 DO 신호가 정확하게 구성되었는지 확인하십시오.
1010
Mech-Vision: 포즈 수량이 레이블 수량과 불일치함
오류 원인:
-
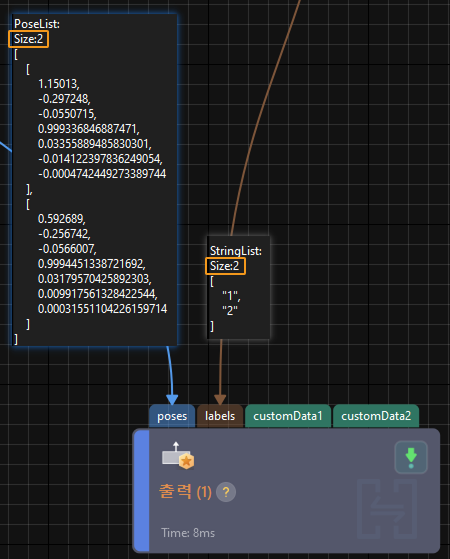
Mech-Vision 프로젝트의 ‘출력’ 스텝에서 poses포트의 포즈 수량이 labels포트의 레이블 수량과 불일치합니다.
해결 방법:
-
Mech-Vision 프로젝트 데이터 스트림의 포즈와 레이블 수량이 일치한지 확인하십시오. 예를 들어, 아래 그림에서 poses 포트 데이터와 labels 포트 데이터의 Size가 모두 2로, 두 개의 수가 동일합니다. 만약 poses 포트 데이터의 Size가 3이고, labels 포트 데이터의 Size가 2인 경우, 두 개의 수가 같지 않으므로 위와 같은 오류가 발생합니다.
1011
Mech-Vision: 프로젝트 번호가 없음
오류 원인:
-
설정한 Mech-Vision 프로젝트 번호가 프로젝트 목록 인터페이스에 없습니다. 예를 들어, 프로젝트 목록 인터페이스에 프로젝트 번호 1만 있으나 설정한 프로젝트 번호는 2입니다.
해결 방법:
-
솔루션 자동 로드 옵션이 선택되어 있는지 확인하십시오.
-
설정한 Mech-Vision 프로젝트 번호가 프로젝트 목록 인터페이스에 이미 존재하는지 확인하십시오.
1012
Mech-Vision: 파라미터 레시피 번호가 없음
오류 원인:
-
설정한 파라미터 레시피 번호가 파라미터 레시피 에디터 인터페이스에 없습니다. 예를 들어, 파라미터 레시피 에디터에 번호가 1인 파라미터 레시피만 있으나 설정한 파라미터 레시피 번호는 2입니다.
해결 방법:
-
설정한 파라미터 레시피 번호가 파라미터 레시피 에디터 인터페이스에 있는지 확인하십시오.
1013
Mech-Vision파라미터 레시피가 설정되지 않았음
오류 원인:
-
클라이언트 프로그램에서 ‘Mech-Vision파라미터 레시피’ 명령을 호출하나 Mech-Vision 프로젝트에서 파라미터 레시피를 설정하지 않았습니다.
해결 방법:
-
정확한 파라미터 레시피와 번호를 위해 Mech-Vision 프로젝트의 파라미터 레시피 설정을 확인하십시오.
-
프로젝트에서 파라미터 레시피를 전환할 필요가 없는 경우 클라이언트 프로그램에서 ‘Mech-Vision파라미터 레시피 전환’ 명령을 호출할 필요가 없습니다.
1014
Mech-Vision: 파라미터 레시피 전환 실패
오류 원인:
-
Mech-Vision 프로젝트가 실행 중입니다. 파라미터 레시피를 변경하면 이 오류가 발생합니다.
-
Mech-Vision 소프트웨어와 통신 컴포넌트 간의 통신에 이상이 발생했습니다.
해결 방법:
-
도움이 필요하면 Mech-Mind기술 서포트팀에게 문의하십시오.
1015
Mech-Vision: 프로젝트 실행 중 오류 발생
오류 원인:
-
Mech-Vision 프로젝트 운영 중에 오류가 발생했습니다.
| 이 상태 코드는 Mech-Vision 프로젝트가 실행되는 동안 오류가 발생했음을 나타낼 뿐, 구체적인 오류 원인이 밝혀지지 않았습니다. |
해결 방법:
-
로그 인터페이스에서의 오류 메시지를 확인하고 오류 메시지에 따라 Mech-Vision 프로젝트 문제를 해결하십시오.
1016
Mech-Vision: 명령어로 얻은 데이터가 "출력" 스텝의 "포트 유형" 파라미터 값과 일치하지 않았음
오류 원인:
-
클라이언트 프로그램이 '비전 결과 획득하기' 명령어를 호출할 때, Mech-Vision 프로젝트의 '출력' 스텝에서 포트 유형이 사전 정의(비전 결과)로 선택되지 않았습니다.
-
클라이언트 프로그램이 'Mech-Vision 사용자 자체 정의한 데이터를 획득하기' 명령어를 호출할 때, Mech-Vision 프로젝트의 '출력' 스텝에서 포트 유형이 사용자 정의로 선택되지 않았습니다.
-
클라이언트 프로그램이 'Mech-Vision 계획 경로를 획득하기' 명령어를 호출할 때, Mech-Vision 프로젝트의 '출력' 스텝에서 포트 유형이 사전 정의(로봇 경로)로 선택되지 않았습니다.
해결 방법:
-
Mech-Vision 프로젝트의 '출력' 스텝의 '포트 유형' 파라미터 값을 확인하십시오.
-
클라이언트 프로그램이 '비전 결과 획득하기' 명령어를 호출할 때, Mech-Vision 프로젝트의 '출력' 스텝에서 포트 유형을 사전 정의(비전 결과)로 선택합니다.
-
클라이언트 프로그램이 'Mech-Vision 사용자 자체 정의한 데이터를 획득하기' 명령어를 호출할 때, Mech-Vision 프로젝트의 '출력' 스텝에서 포트 유형을 사용자 정의로 선택합니다.
-
클라이언트 프로그램이 'Mech-Vision 계획 경로를 획득하기' 명령어를 호출할 때, Mech-Vision 프로젝트의 '출력' 스텝에서 포트 유형을 사전 정의(로봇 경로)로 선택합니다.
-
1017
Mech-Vision: 문자열 레이블이 숫자로 전환 실패
오류 원인:
-
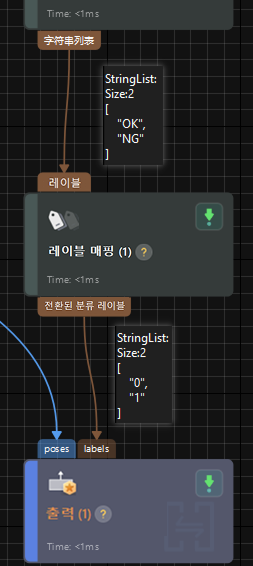
Mech-Vision‘출력’ 스텝에서 labels포트에서 출력된 데이터는 정수 숫자 문자열이 아니었습니다.
해결 방법:
-
labels포트에서 출력된 데이터를 체크하십시오. 정수 숫자 문자열이 아닌 경우 ‘출력’ 스텝을 사용하기 전에 ‘레이블 매핑’ 스텝을 추가하여 레이블 형식을 정수 숫자 문자열로 전환하십시오. 예를 들어, 아래 그림에서 '레이블을 매핑하기' 스텝으로 문자열 레이블 'OK’를 정수 형태의 문자열 '0’으로, 문자열 레이블 'NG’를 정수 형태의 문자열 '1’로 매핑합니다.
1018
Mech-Vision: 무효한 비전 포인트 수량
오류 원인:
-
‘Mech-Vision 프로젝트 실행’ 명령을 호출할 때 ‘원하는 비전 포인트 또는 경로 포인트 수량’의 파라미터 값을 *한 번에 전송할 수 있는 최대 포즈 수량*보다 큰 값으로 설정했습니다.
| Mech-Vision툴 바에서 에서 원하는 대로 *한 번에 전송할 수 있는 최대 포즈 수량*을 변경할 수 있으나 최대 30개로 제한되어 있습니다. |
해결 방법:
-
설정한 ‘원하는 비전 포인트 또는 웨이 포인트 수량’의 파라미터 값이 *한 번에 전송할 수 있는 최대 포즈 수량*보다 크지 않은지 확인하십시오.
1019
Mech-Vision: 실행 시 제한 시간 초과
오류 원인:
-
타이밍은 ‘비전 결과 획득’ 명령을 호출할 때부터 시작되며, 제한 시간(기본값 10초) 내에 Mech-Vision 프로젝트가 완료되지 않은 경우 이 오류가 보고됩니다.
| Mech-Vision 툴 바의 에서 Mech-Vision 데이터 가져오는 데 시간 초과를 수정하여 시간 제한을 변경할 수 있습니다. |
해결 방법:
-
클라이언트 프로그램에서 ‘비전 결과 획득’ 명령을 호출하기 전에 지연 프로그램을 추가할 수 있습니다.
-
Mech-Vision 프로젝트 실행 시간이 상대적으로 긴 경우, ‘데이터 획득 제한 시간’을 적당히 수정할 수 있습니다.
1020
Mech-Vision: 프로젝트가 시작되지 않았음
오류 원인:
-
클라이언트 프로그램에서 ‘Mech-Vision 프로젝트 실행’ 명령을 먼저 호출하지 않고 ‘비전 결과 획득’ 명령을 직접 호출하는 경우 이 오류가 보고됩니다. 예를 들어 프로젝트 목록에 번호가 1과 2인 Mech-Vision 프로젝트가 있는데 클라이언트 프로그램에서 명령어에 따라 Mech-Vision 프로젝트 1을 먼저 실행한 다음 Mech-Vision 프로젝트 2의 비전 결과를 획득하는 경우 이 오류가 보고됩니다.
-
클라이언트 프로그램에서 이미 ‘비전 결과 획득’ 명령을 호출하여 모든 비전 포인트를 획득하였으나 ‘비전 결과 획득’ 명령을 계속 호출했습니다.
해결 방법:
-
클라이언트 프로그램에서 ‘비전 결과 획득’ 명령어에 설정한 Mech-Vision 프로젝트 번호가 정확하게 설정되었는지 확인하십시오.
-
‘비전 결과 획득’ 명령의 반환 데이터에서 ‘모든 비전 포인트 획득 여부’ 파라미터의 값이 1인 경우 모든 비전 포인트가 전송되었음을 의미하며, 클라이언트 프로그램에서 이 명령을 다시 호출해서는 안 됩니다.
1021
Mech-Vision: 물체 치수 설정 실패
오류 원인:
-
Mech-Vision 프로젝트에 ‘물체 치수 읽기’ 스텝이 없습니다.
해결 방법:
-
Mech-Vision 프로젝트에 ‘물체 치수 읽기’ 스텝이 있는지 확인하십시오.
1022
Mech-Vision: 무효한 물체 치수
오류 원인:
-
Mech-Vision 프로젝트에 입력한 물체 치수에 영 또는 음수가 있습니다.
해결 방법:
-
입력한 물체 치수(길이, 너비, 높이) 값이 모두 양의 실수인지 확인하십시오.
1023
Mech-Vision: 카메라 연결 실패
오류 원인:
-
Mech-Vision 프로젝트의 ‘카메라에서 이미지를 캡처하기’ 스텝에서 카메라를 연결할 수 없었습니다.
해결 방법:
-
카메라 전원과 네트워크가 모두 제대로 연결되어 있도록 설정을 확인하십시오.
-
‘카메라에서 이미지를 캡처하기’ 스텝에서 설정한 카메라 IP 주소와 포트가 정확한지 확인하십시오.
1024
Mech-Vision: 포즈 목록 크기가 사용자 자체 정의 데이터 목록 크기와 동일하지 않음
오류 원인:
-
Mech-Vision 프로젝트의 ‘출력’ 스텝에서 poses포트의 포즈 목록 크기가 사용자 자체 정의 포트의 데이터 목록 크기와 불일치합니다. 예를 들어, 포즈 목록이[[1,1, 1, 0, 1, 0, 0]], [1, 1, 1, 0, 0, 0, 0]]이라고 가정하고 사용자 자체 정의 데이터 목록이 [[1,1]] 또는 [ ]인 경우, 두 목록의 크기가 동일하지 않으며, 사용자 자체 정의 데이터 목록이 [1, 1]인 경우 두 목록의 크기가 동일합니다.
해결 방법:
-
Mech-Vision 프로젝트 데이터 스트림에서의 포즈와 사용자 자체 정의 데이터의 목록 크기가 동일한지 확인하십시오. 예를 들어, 아래 그림에서 poses 포트 데이터와 custom 포트 데이터의 Size가 모두 2로, 두 개의 목록 크기가 동일합니다. 만약 poses 포트 데이터의 Size가 3이고, custom 포트 데이터의 Size가 2인 경우, 두 개의 목록 크기가 같지 않으므로 위와 같은 오류가 발생합니다.

1025
Mech-Vision: 가상 이미지 데이터를 사용 중이며 현재 실행하지 않음
오류 원인:
-
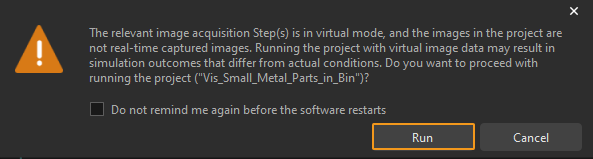
Mech-Vision 프로젝트에서 '카메라에서 이미지를 캡처하기' 스텝에서 사용하는 이미지는 실제 카메라로 수집된 이미지 데이터가 아니라, 로컬 가상 이미지 데이터입니다.
해결 방법:
-
"카메라에서 이미지를 캡처하기" 스텝에서 카메라 설정 파라미터의 가상 모드가 비활성화했는지 확인합니다.
-
가상 모드를 이용해야 할 경우 아래 팝업창에서 실행을 클릭하면 데이터가 정상적으로 전송됩니다. 또한 소프트웨어 재시작 전에 더 이상 알림이 없음 옵션을 선택하는 것이 좋습니다.
1026
Mech-Vision: 무효한 포즈 유형
오류 원인:
-
‘Mech-Vision 프로젝트 설정 경로’ 명령을 호출할 때 설정한 ‘웨이 포인트의 포즈 유형’ 파라미터 값에 오류가 있습니다. ‘웨이 포인트의 포즈 유형’ 파라미터 값은 1 또는 2로만 설정할 수 있습니다.
해결 방법:
-
명령어에 설정된 파라미터 값이 값 범위 내에 있는지 확인합시오.
1027
Mech-Vision: '경로 계획' 스텝 실행 실패
오류 원인:
-
Mech-Vision 프로젝트가 ‘경로 계획’ 스텝으로 실행되는 동안 오류가 발생했습니다.
| 이 상태 코드는 ‘경로 계획’ 스텝에서 오류가 발생했음을 나타낼 뿐, 구체적인 오류 원인이 밝혀지지 않았습니다. |
해결 방법:
-
경로 계획 도구를 열고 자세한 로그를 확인하여 구체적인 오류 원인을 확인하십시오.
1030
Mech-Vision: 로봇이 웨이 포인트에 도달할 수 없었음
‘경로 계획’ 스텝에서 오류가 보고됩니다. 오류 원인은 다음과 같습니다.
-
웨이 포인트가 로봇의 도달 범위를 벗어났습니다.
-
로봇의 운동학 역해석이 실패했습니다.
해결 방법:
-
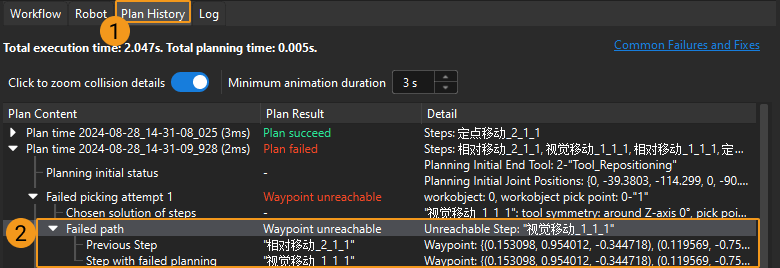
'경로 계획' 스텝의 구성 마법사를 열고, 계획 기력을 확인하여 빨간색으로 표시된 부분을 찾아 단계별로 최하위까지 열어 문제의 원인이 되는 구체적인 스텝을 확인하십시오.
-
'웨이 포인트 도달 불가’에 대해 다음 사항을 확인하십시오.
-
웨이 포인트의 포즈를 확인합니다. 포즈가 올바른 방향인지, 도달 수 있는지 확인하십시오. 물체 포즈와 TCP 포즈는 다르다는 점에 유의하세요.
-
TCP 값 확인: "경로 계획"의 TCP 데이터가 로봇의 실제 TCP 값과 일치하는지 확인하십시오.
-
1033
Mech-Vision: 싱귤래리티가 감지되었음
‘경로 계획’ 스텝에서 오류가 보고됩니다. 오류 원인은 다음과 같습니다.
-
로봇은 경로 계획 중 각속도 또는 각가속도가 소프트웨어에서 설정한 싱귤래리티 판단 역치를 초과하는 싱귤래리티 오류가 감지되었습니다.
-
로봇은 계획된 직선 경로로 이동할 수 없습니다.
해결 방법:
-
소프트웨어에서 설정한 싱귤래리티 역치가 너무 엄격한 경우 감속비를 하향 조정하거나 최대 속도 역치를 수정할 수 있습니다. 싱귤래리티 역치를 수정할 경우 Mech-Mind기술 서포트팀에게 문의하십시오.
-
로봇이 직선으로 움직일 수 없는 경우 관절형 동작으로 조정하거나 전환점을 적절하게 추가할 수 있습니다.
1035
Mech-Vision: 무효한 픽 포인트
오류 원인:
-
모든 픽 포인트는 빈 밖에 있습니다.
-
대상 물체 편집기의 픽 포인트에 설정된 사용할 수 있는 말단장치가 경로 계획 도구에서 선택한 말단장치와 일치하지 않습니다.
해결 방법:
-
오류 원인1에 대해:
-
카메라 외부 파라미터가 올바른지 확인하십시오.
-
Mech-Vision 프로젝트의 '출력' 스텝에서 출력된 대상 물체의 픽 포인트 포즈가 실제 대상 물체의 포즈와 동일한지 확인하십시오.
-
Mech-Vision 프로젝트의 '경로 계획' 스텝에서 구성 마법사를 클릭하여 경로 계획 도구로 들어가십시오. 설정한 빈 위치가 실제 빈 위치와 동일한지 확인하십시오.
-
-
오류 원인2에 대해:
-
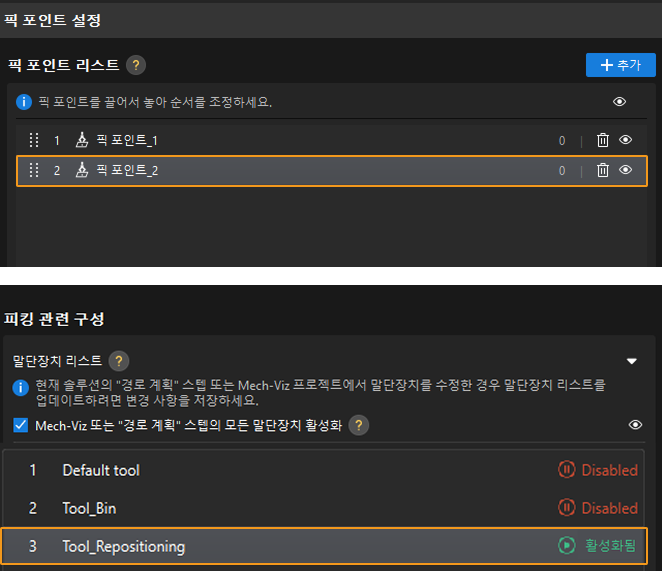
대상 물체 편집기에서 픽 포인트에 사용 가능한 말단장치가 올바르게 구성되었는지 확인합니다. 예를 들어, 다음 이미지의 PickPoint_2에 사용 가능한 말단장치는 Tool_Repositioning입니다.
-
경로 계획 도구의 전역 구성에서 선택한 말단장치가 말단장치 목록에 있는 픽 포인트에 사용할 수 있는 말단장치인지 확인하십시오.

-
1036
Mech-Vision: 로봇 충돌이 감지되었음
‘경로 계획’ 스텝에서 오류가 보고됩니다. 오류 원인은 다음과 같습니다.
-
로봇이 시나리오 물체와 충돌할 수 있습니다.
-
로봇이 물체 포인트 클라우드와 충돌할 수 있습니다.
해결 방법:
-
로봇이 시나리오 물체와 충돌할 경우 시나리오 물체를 피하기 위해 전환점을 추가할 수 있습니다.
-
로봇이 물체의 포인트 클라우드와 충돌할 경우 포인트 클라우드 충돌 감지 역치를 조정할 수 있습니다.
-
계획된 경로의 초기 위치에서 오류가 보고되는 경우 로봇의 HOME포즈를 설정할 수 있습니다.
1037
Mech-Vision: 적당한 팔레타이징을 위한 배치 위치가 없음
오류 원인:
-
트레이가 가득 찼으며 적당한 팔레타이징을 위한 배치 위치가 없음
해결 방법:
-
팔레타이징 유형 스텝의 "계획 실패" 아웃 포트에서 적당한 처리 논리를 추가하세요.
1044
Mech-Vision: '비전 이동' 스텝이 비전 포즈를 수신하지 않았음
‘경로 계획’ 스텝에서 오류가 보고됩니다. 오류 원인은 다음과 같습니다.
-
‘경로 계획’ 스텝의 입력 포트가 포즈 데이터를 수신하지 못했습니다.
해결 방법:
-
해당 포트에 포즈 데이터가 있도록 ‘경로 계획’ 스텝의 비전 포인트 포트를 확인하십시오.
1046
Mech-Vision: 무효한 말단장치
‘경로 계획’ 스텝에서 오류가 보고됩니다. 오류 원인은 다음과 같습니다.
-
설정한 말단장치가 무효합니다.
해결 방법:
-
전역 구성에서 말단장치가 선택되도록 경로 계획 도구에서 설정한 말단장치를 확인하십시오.
1047
Mech-Vision: 캡처 완료를 기다릴 때 시간 초과
오류 원인:
-
‘카메라에서 이미지를 캡처하기’ 스텝의 실행이 ‘캡처 완료를 기다릴 때의 제한 시간’ 기간 내에 완료되지 않았습니다.
해결 방법:
-
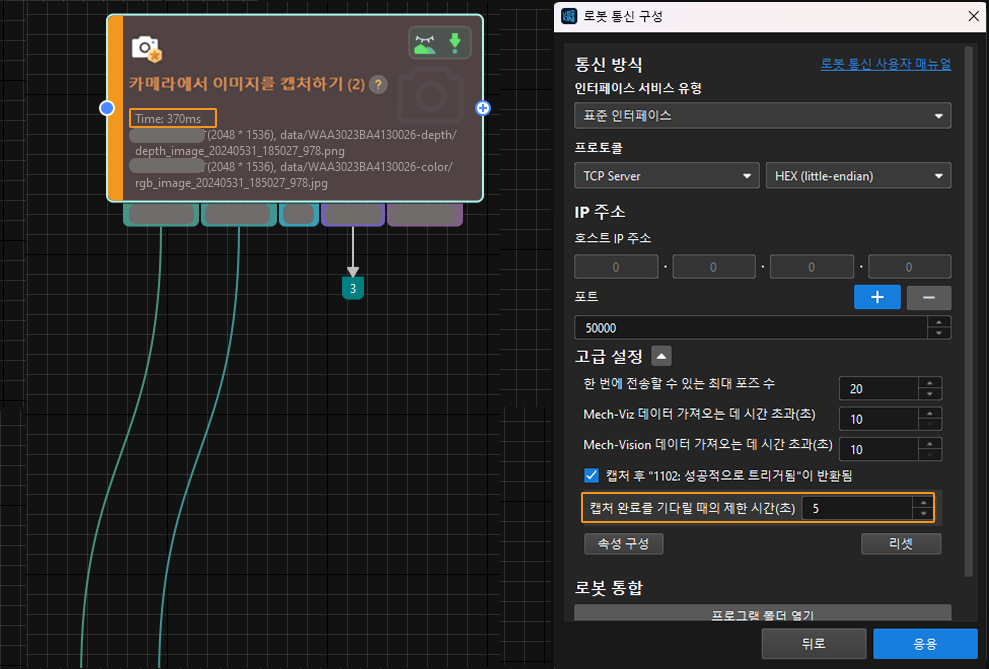
툴 바에서 ‘로봇 통신 설정’을 선택하고 ‘고급 설정’을 클릭하십시오. ‘캡처 완료를 기다릴 때의 제한 시간’(‘캡처 후 "1102: 성공적으로 트리거됨"이 반환됨' 체크란이 선택된 경우에만 표시됨)를 확인하십시오.
-
설정한 ‘캡처 완료를 기다릴 때의 제한 시간’ 값과 ‘카메라에서 이미지를 캡처하기’ 스텝의 실행 시간을 비교하십시오. ‘캡처 완료를 기다릴 때의 제한 시간’의 값이 ‘카메라에서 이미지를 캡처하기’ 스텝의 실제 실행 시간 보다 짧은 경우 ‘캡처 완료를 기다릴 때의 제한 시간’의 값을 ‘카메라에서 이미지를 캡처하기’ 스텝의 실행 시간보다 길도록 수정하십시오. 예를 들어, 아래 그림에서 '캡처 완료를 기다릴 때의 제한 시간’이 '카메라에서 이미지를 캡처하기' 스텝의 실행 시간보다 긴 경우, 이 설정은 합리적입니다.
1048
Mech-Vision: 박스 마스크 오류 인식
오류 원인:
-
Mech-Vision 프로젝트에서 ‘박스 타겟의 물체 마스크 검증’ 스텝을 사용하여 박스 마스크를 검증하나 검증 결과가 이 스텝에서 설정한 파라미터와 일치하지 않습니다. 즉 설정한 박스 치수가 일관되어야 하고, 모든 박스가 인식되어야 하며, *직사각형 검증 *파라미터에 오류가 있습니다.
해결 방법:
-
정확한 입력 포트 데이터와 스텝 파라미터를 위해 ‘박스 타겟의 물체 마스크 검증’ 스텝을 확인하십시오.
1049
Mech-Vision: 박스 치수 오류 인식
오류 원인:
-
Mech-Vision 프로젝트에서 ‘박스 사이즈의 유효성 검증’ 스텝을 사용하여 박스 마스크를 검증하나 검증 결과가 이 스텝에서 설정한 파라미터와 일치하지 않습니다. 즉 설정한 박스 치수 관련 파라미터에 오류가 있습니다.
해결 방법:
-
정확한 입력 포트 데이터와 스텝 파라미터를 위해 ‘박스 타겟의 물체 마스크 검증’ 스텝을 확인하십시오.
1051
Mech-Vision: 포즈 설정 실패
오류 원인:
-
클라이언트 프로젝트는 "Mech-Vision 프로젝트에 포즈를 입력하기" 명령어를 호출할 때 "스텝 명칭" 파라미터가 숫자가 아니거나, "스텝 명칭" 파라미터에 해당하는 스텝이 '포즈를 빠르게 만들기’가 아닌 경우입니다.
해결 방법:
-
Mech-Vision 프로젝트에서 "포즈를 빠르게 만들기" 스텝의 스텝 명칭 파라미터 값이 숫자인지 확인하십시오.

-
"Mech-Vision 프로젝트에 포즈를 입력하기" 명령어를 확인하고, 설정한 "스텝 명칭" 명령어 파라미터가 위 그림에서 설정한 스텝 명칭 파라미터와 일치하는지 확인하십시오.
1052
Mech-Vision: 성명/ 전역 변수 획득 실패
오류 원인:
-
변수 번호 ID가 유효 범위를 벗어났거나, 일치하는 변수를 찾을 수 없거나, 대상 ID 유형이 통신 읽기/쓰기를 지원하지 않습니다.
-
변수 데이터 유형이 비정상입니다. 실제 변수 값이 정의된 데이터 유형과 일치하지 않습니다.
점검 방법:
-
대상 변수 ID가 존재하는지 확인합니다.
-
변수 ID에 해당하는 데이터가 통신 읽기/쓰기 작업을 지원하는지 확인합니다.
-
변수 값의 데이터 유형과 변수에 미리 정의된 데이터 유형이 일치하는지 점검하여, 유형이 서로 일치하도록 확인합니다.
1053
Mech-Vision: 모드 전환 명령 호출에 실패
오류 원인:
-
솔루션 설정이 비정상입니다. 솔루션 ID가 존재하지 않거나, 솔루션 경로가 유효한 솔루션 폴더가 아닙니다.
-
Mech-Vision현재 솔루션에 열려 있는 2차 팝업 창이 있어 명령 실행이 차단되었습니다.
-
Mech-Vision 솔루션 또는 Mech-Viz 프로젝트를 불러오는 데 실패했습니다.
점검 방법:
-
메뉴 - 로봇 및 통신 설정 - 솔루션 관리 옵션에서 필요한 솔루션 ID가 존재하고 올바른지 확인하고, 솔루션 경로가 유효한 폴더인지 점검합니다.
-
Mech-Vision 현재 솔루션에서 열려 있는 모든 2차 팝업 창을 닫은 뒤, 명령을 다시 실행합니다.
-
Mech-Vision 로그를 확인하여 구체적인 문제를 파악합니다. 해결할 수 없으면 Mech-Mind 기술 지원에 문의하여 도움을 받으시기 바랍니다.
Mech-Viz 오류 분석
2001
Mech-Viz: 소프트웨어가 등록되지 않았음
오류 원인:
-
Mech-Viz: 소프트웨어가 시작되지 않았습니다.
-
개발자 모드에서 동시에 여러 Mech-Viz소프트웨어를 시작했습니다.
점검 방법:
-
Mech-Viz소프트웨어가 열려 있는지 확인하십시오.
-
Mech-Viz소프트웨어의 개발자 모드를 종료하고 Mech-Viz소프트웨어를 리부팅하십시오.
2002
Mech-Viz: 프로젝트 운영 중
오류 원인:
-
Mech-Viz 프로젝트가 계속 실행되는 동안 클라이언트 프로그램은 ‘Mech-Viz 프로젝트 실행’ 명령을 다시 호출하여 Mech-Viz 프로젝트를 실행하려고 했습니다.
점검 방법:
-
클라이언트 프로그램에서 단기간 내에 동일한 Mech-Viz 프로젝트가 다시 시작되지 않도록 확인하십시오.
2004
Mech-Viz: 로봇이 웨이 포인트에 도달할 수 없음
오류 원인:
-
웨이 포인트가 로봇의 도달 범위를 벗어났습니다.
-
Mech-Viz 프로젝트에 "말단장치를 바꾸기" 스텝이 있으면, 말단장치 전환 전후에 TCP가 변경되어 로봇이 웨이 포인트에 도달할 수 없을 수 있습니다.
점검 방법:
-
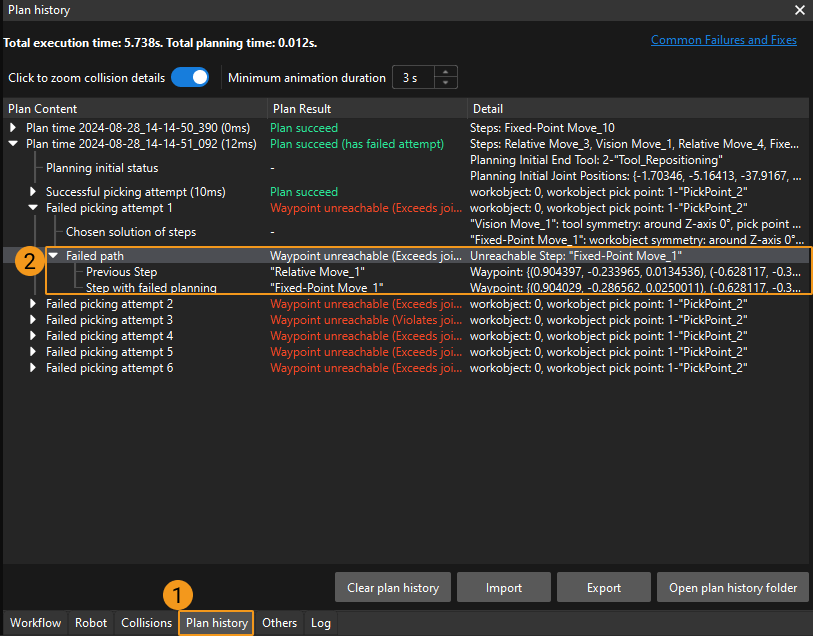
Mech-Viz 소프트웨어를 열고, 계획 기력을 확인하여 빨간색으로 표시된 부분을 찾아 단계별로 최하위까지 열어 문제의 원인이 되는 구체적인 스텝을 확인하십시오.
-
'웨이 포인트 도달 불가’에 대해 다음 사항을 확인하십시오.
-
웨이 포인트의 포즈를 확인합니다. 포즈가 올바른 방향인지, 도달 수 있는지 확인하십시오. 물체 포즈와 TCP 포즈는 다르다는 점에 유의하세요.
-
TCP 값 확인: Mech-Viz의 TCP 데이터가 로봇의 실제 TCP 값과 일치하는지 확인하십시오.
-
소프트 리미트 확인: 소프트 리미트 설정이 올바른지 확인하십시오. (Mech-Viz 소프트웨어 인터페이스 오른쪽 패널 하단에서 차례대로 를 선택하십시오.)
-
2006
Mech-Viz: Mech-Viz를 트리거한 명령어에서 무효한 파라미터가 있음
오류 원인:
-
‘Mech-Viz 프로젝트 실행’ 명령을 호출할 때 설정한 ‘로봇 포즈 유형’ 파라미터 값에 오류가 있습니다. ‘로봇 포즈 유형’의 파라미터 값 범위는 0에서 2까지입니다.
점검 방법:
-
명령어에 설정된 파라미터 값이 값 범위 내에 있는지 확인합시오.
2008
Mech-Viz: 실행 중 오류 발생
오류 원인:
-
Mech-Viz: 프로젝트가 실행 중에 오류가 발생했습니다.
점검 방법:
-
Mech-Viz소프트웨어를 열고 자세한 로그를 확인하여 구체적인 오류 원인을 확인하십시오.
2011
Mech-Viz: 숫자 출력 신호 목록이 제공되지 않았음
오류 원인:
-
획득한 Mech-Viz진공 그리퍼의 DO 신호가 비어 있습니다.
점검 방법:
-
‘비전 이동’ 스텝 다음 ‘DO 설정’ 스텝이 있는지 확인하고, '통신 설정’에서 '로봇으로 전송’을 체크합니다.
-
최종 말단장치 유형에 디팔레타이징 진공 그리퍼가 선택되어 있고 디팔레타이징 진공 그리퍼 구성기에서 DO 신호가 정확하게 구성되었는지 확인하십시오.
2012
Mech-Viz: 무효한 포즈 유형
오류 원인:
-
‘Mech-Viz계획 경로 획득’ 명령을 호출할 때 설정한 ‘웨이 포인트 포즈 유형’ 파라미터 값에 오류가 있습니다. ‘웨이 포인트의 포즈 유형’ 파라미터 값은 1 또는 2입니다.
-
‘Mech-Viz 프로젝트를 실행하고 계획 경로 획득’ 명령어를 호출할 때 설정한 ‘웨이 포인트 포즈 유형’ 파라미터 값에 오류가 있습니다. ‘웨이 포인트의 포즈 유형’ 파라미터 값은 1 또는 2입니다.
점검 방법:
-
명령어에 설정된 파라미터 값이 값 범위 내에 있는지 확인합시오.
2013
Mech-Viz: 무효한 포즈 데이터
오류 원인:
-
‘Mech-Viz 프로젝트 실행’ 명령을 호출할 때 로봇 포즈 파라미터 값에 오류가 있습니다. 구체적인 원인은 다음과 같이 분류됩니다.
-
관절 각도 데이터가 6자리 미만입니다.
-
플랜지 포즈 데이터가 6자리 미만입니다.
-
플랜지 포즈 데이터가 모두 0입니다.
-
| 로봇은 기본적으로 6축 로봇으로 설정되어 있습니다. 4축 또는 5축 로봇인 경우 0을 사용하여 포즈 데이터의 나머지 필드를 채우십시오. |
점검 방법:
-
명령어에 설정된 로봇 포즈 파라미터 값이 정확한지 확인하십시오.
2014
Mech-Viz: 프로젝트가 자동 로드로 설정되지 않았음
오류 원인:
-
Mech-Viz 프로젝트가 Mech-Viz소프트웨어에서 열려 있지 않았습니다.
-
Mech-Viz 프로젝트가 자동 로드로 설정되지 않았습니다.
점검 방법:
-
Mech-Viz소프트웨어에서 정확한 프로젝트를 열고, 프로젝트 이름을 마우스 오른쪽 버튼으로 클릭하여 *를 자동으로 로드하기*를 선택하십시오.
2015
Mech-Viz: 프로젝트 열려 있지 않음
오류 원인:
-
해당 Mech-Viz 프로젝트가 열려 있지 않습니다.
점검 방법:
-
현재 Mech-Vision와 동일한 솔루션의 Mech-Viz 프로젝트를 열어 주시기 바랍니다.
2016
Mech-Viz: 스텝 파라미터 설정 실패
오류 원인:
-
클라이언트 프로그램에서 ‘Mech-Viz스텝 파라미터 값 설정’ 명령을 호출할 때 오류가 발생했습니다.
점검 방법:
-
property_config파일에서 스텝 번호와 파라미터 이름이 정확하게 설정되었는지 확인하십시오.
| Mech-Vision툴 바의 menu:로봇 통신 설정 [다음 > 고급 설정]에서 *속성 설정*을 클릭하여 property_config파일을 엽니다. |
2017
Mech-Viz: 실행 정지 실패
오류 원인:
-
‘Mech-Viz 프로젝트 정지’ 명령을 호출한 후 5초 이내에 Mech-Viz 프로젝트가 정상적으로 중단되지 않았습니다.
점검 방법:
-
도움이 필요하면 Mech-Mind기술 서포트팀에게 문의하십시오.
2018
Mech-Viz: 무효한 분기 아웃 포트 번호
오류 원인:
-
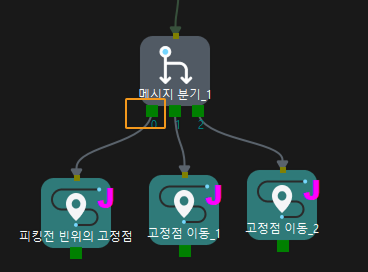
‘Mech-Viz메시지 분기 아웃 포트 설정’ 명령를 호출할 때 설정한 분기 아웃 포트 값이 0 이하이거나 ‘메시지 분기’ 스텝의 아웃 포트 수량을 초과했습니다.
점검 방법:
-
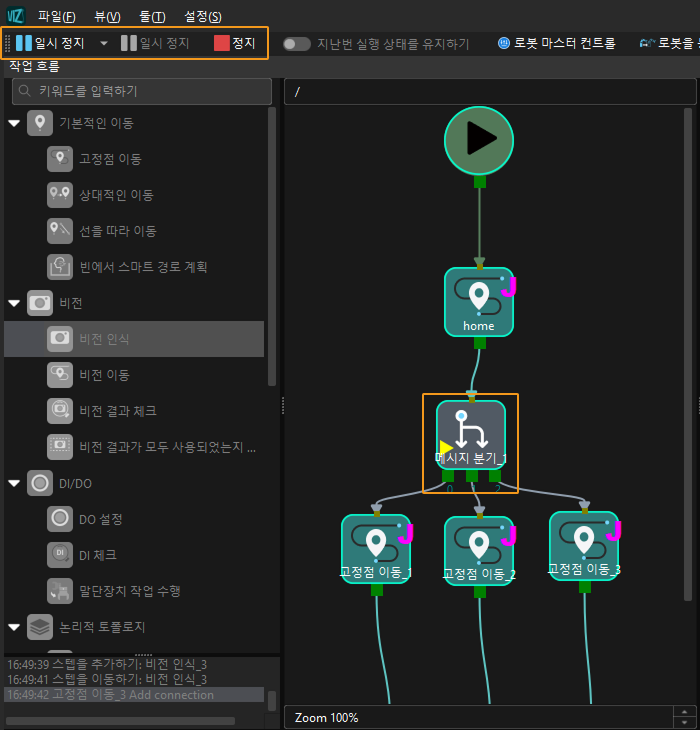
Mech-Viz 프로젝트를 열고 작업 흐름 인터페이스의 "메시지 분기" 스텝을 찾아 명령어에서 설정한 분기 아웃 포트 번호가 "메시지 분기" 스텝에서 해당 아웃 포트와 일치하는지 확인하십시오. 예를 들어, 명령어에서 분기 아웃 포트 번호를 1로 설정하면, Mech-Viz 프로젝트 실행 시 '메시지 분기' 스텝의 아웃 포트 0을 따라 계속 실행됩니다.
2019
Mech-Viz: 분기 설정 실패
오류 원인:
-
‘Mech-Viz메시지 분기 아웃 포트 설정’ 명령을 호출할 때, 설정한 스텝 번호가 Mech-Viz 프로젝트에 해당하는 ‘메시지 분기’ 스텝이 없습니다.
점검 방법:
-
명령어로 설정한 스텝 번호가 Mech-Viz 프로젝트에 해당하는 스텝이 있는지 확인하십시오.
2020
Mech-Viz: 싱귤래리티가 감지되었음
오류 원인:
-
로봇은 경로 계획 중 각속도 또는 각가속도가 Mech-Viz소프트웨어에서 설정한 싱귤래리티 판단 역치를 초과하는 싱귤래리티 오류를 감지했습니다.
-
로봇은 계획된 직선 경로로 이동할 수 없습니다.
점검 방법:
-
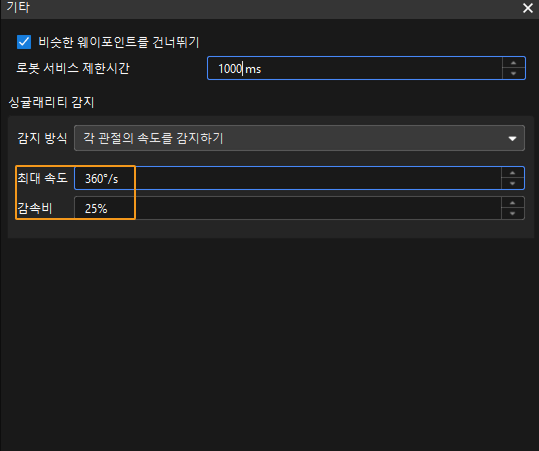
Mech-Viz소프트웨어에서 설정한 싱귤래리티 임계값이 너무 엄격한 경우 Mech-Viz 소프트웨어의 기타 인터페이스에서 최대 속도 또는 감속비를 수정하십시오.
-
최대 속도: 로봇의 각 관절에 대해 허용되는 최대 각속도입니다.
-
감속비: 로봇의 어떤 관절 속도가 지정된 최대 속도의 설정값을 초과하는 것이 감지되면 Mech-Viz는 이동 유형 스텝에 설정된 속도가 감속비에 따라 감소되고(감소된 속도 = 원본 속도 × 감속비) 싱귤래리티 감지가 다시 수행됩니다. 감소된 속도가 于최대 속도의 설정값보다 작으면, 로봇은 해당 스텝을 수행할 때 감소된 속도로 이동합니다. 감소된 속도가 여전히 于최대 속도의 설정값보다 크면, Mech-Viz 소프트웨어는 로봇이 움직일 때 싱귤래리티 문제가 발생하여 로봇이 원하는 위치에 도달할 수 없다고 판단합니다.
-
-
로봇이 직선으로 이동할 수 없는 경우, 먼저 방법 1을 시도해 보십시오. 문제가 여전히 해결되지 않으면, 나머지 두 가지 방법 중 하나를 선택하여 시도해 보십시오.
-
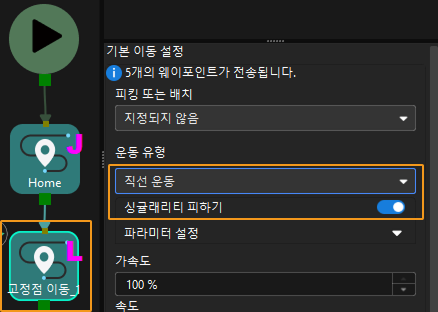
방법 1: Mech-Viz 소프트웨어에서 오류가 발생한 이동 유형 스텝을 선택한 후, 직선 운동 옵션에서 싱귤래리티 피하기를 선택하고 실제 상황에 맞게 파라미터를 설정하십시오.
-
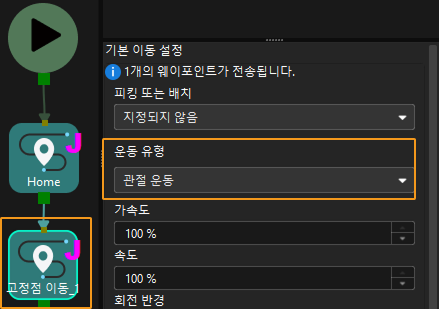
방법 2: Mech-Viz 소프트웨어에서 오류가 발생한 이동 유형 스텝을 선택한 후, 운동 방식 파라미터는 관절 운동으로 설정하십시오.
-
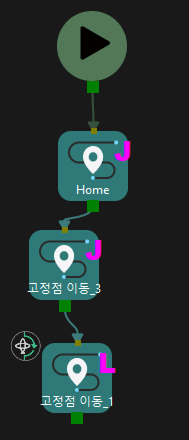
방법 3: Mech-Viz 소프트웨어에서 오류가 발생한 스텝 전에 하나 이상의 이동 유형 스텝을 추가하십시오. 이는 중간 웨이 포인트를 추가하는 것을 의미합니다. 예를 들어, 아래 그림에서 이동_1과 home 사이에 이동_3을 추가합니다. 이는 중간 웨이 포인트 하나를 추가하는 것을 의미합니다.
-
2022
Mech-Viz: 프로젝트가 실행되지 않거나 결과 없이 실행되었음
오류 원인:
-
클라이언트 프로그램에서 ‘Mech-Viz분기 아웃 포트 설정’ 명령을 호출할 때 Mech-Viz 프로젝트가 실행되고 있지 않았습니다.
-
클라이언트 프로그램에서 ‘Mech-Viz계획된 경로 획득’ 명령을 호출하기 전에 ‘Mech-Viz 프로젝트 실행’ 명령을 호출하지 않았습니다.
-
클라이언트 프로그램에서 ‘Mech-Viz계획된 경로 획득’ 명령을 호출할 때 Mech-Viz는 계획 결과를 출력하지 않았습니다.
-
클라이언트 프로그램에서 이미 ‘Mech-Viz계획된 경로 획득’ 명령을 호출하여 모든 웨이 포인트를 획득하였으나 ‘Mech-Viz계획 경로 획득’ 명령을 계속 호출했습니다.
점검 방법:
-
‘Mech-Viz메시지 분기 아웃 포트 설정’ 명령을 호출할 때 Mech-Viz 프로젝트가 실행되고 있는지 확인하십시오. 즉, '프로젝트 Mech-Viz 실행하기' 명령어를 호출한 후, Mech-Viz 프로젝트가 실행 중임을 확인한 다음(아래 그림과 같이) 'Mech-Viz 메시지 분기 아웃 포트를 설정하기' 명령어를 호출하십시오.
-
클라이언트 프로그램에서 ‘Mech-Viz계획된 경로 획득 ” 명령을 호출하기 전에 ‘Mech-Viz 프로젝트 실행’ 명령을 호출하지 않았습니다.
-
‘Mech-Viz계획 경로 획득’ 명령의 반환 데이터에서 ‘모든 웨이 포인트 획득 여부’ 파라미터 값이 1인 경우 모든 웨이 포인트가 전송되었음을 의미하며, 클라이언트 프로그램은 이 명령을 다시 호출해서는 안 됩니다.
2024
Mech-Viz: 무효한 분기 스텝 번호
오류 원인:
-
‘Mech-Viz메시지 분기 아웃 포트 설정’ 명령을 호출할 때, 설정한 스텝 번호가 자연수가 아니었습니다.
점검 방법:
-
명령어로 설정한 스텝 번호가 자연수인지 확인하십시오.
2025
Mech-Viz: 실행 시 제한 시간 초과
오류 원인:
-
타이밍은 ‘Mech-Viz계획된 경로 획득’ 명령을 호출할 때부터 시작되며, 제한 시간(기본값 10초) 내에 Mech-Viz 프로젝트 실행이 완료되지 않은 경우 이 오류가 보고됩니다.
| Mech-Vision 툴 바의 에서 Mech-Viz 데이터 가져오는 데 시간 초과를 수정하여 시간 제한을 변경할 수 있습니다. |
점검 방법:
-
클라이언트 프로그램에서 ‘Mech-Viz계획된 경로 획득’ 명령을 호출하기 전에 지연 프로그램을 추가할 수 있습니다.
-
Mech-Viz 프로젝트 실행 시간이 상대적으로 긴 경우, ‘데이터 획득 제한 시간’을 적당히 수정할 수 있습니다.
2026
Mech-Viz: 무효한 인덱스 스텝 번호
오류 원인:
-
‘Mech-Viz현재 인덱스 설정’ 명령을 호출할 때, 설정한 스텝 번호가 자연수가 아니었습니다.
점검 방법:
-
명령어로 설정한 스텝 번호가 자연수인지 확인하십시오.
2027
Mech-Viz: 무효한 인덱스 값
오류 원인:
-
‘Mech-Viz현재 인덱스 설정’ 명령을 호출할 때, 설정한 인덱스 값이 자연수가 아니었습니다.
점검 방법:
-
명령어로 설정한 인덱스 값이 자연수인지 확인하십시오.
2028
Mech-Viz: 인덱스 설정 실패
오류 원인:
-
‘Mech-Viz현재 인덱스 설정’ 명령을 호출할 때, 설정한 스텝 번호가 Mech-Viz 프로젝트에 해당하는 인덱스 스텝이 없었습니다.
점검 방법:
-
명령어로 설정한 스텝 번호가 Mech-Viz 프로젝트에 해당하는 스텝이 있는지 확인하십시오.
2030
Mech-Viz: 무효한 픽 포인트
오류 원인:
-
모든 픽 포인트는 지정된 빈 밖에 있습니다.
-
대상 물체 편집기의 픽 포인트에 설정된 사용할 수 있는 말단장치가 Mech-Viz 프로젝트의 "말단장치를 바꾸기" 스텝에서 선택한 말단장치와 일치하지 않습니다.
-
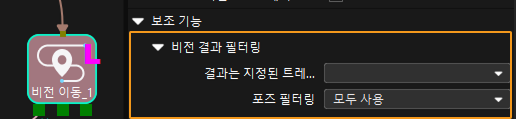
"비전 이동" 스텝의 비전 결과 필터링 기능을 사용하면, Mech-Viz는 지정된 범위를 초과하는 비전 결과는 유효하지 않은 픽 포인트로 간주됩니다.
점검 방법:
-
오류 원인1에 대해:
-
카메라 외부 파라미터가 올바른지 확인하십시오.
-
Mech-Vision 프로젝트의 '출력' 스텝에서 출력된 대상 물체의 픽 포인트 포즈가 실제 대상 물체의 포즈와 동일한지 확인하십시오.
-
Mech-Viz 프로젝트의 "비전 이동" 스텝에서 를 확인하십시오.
-
비전으로 빈 포즈 업데이트를 선택하지 않았으면 Mech-Viz 프로젝트에서 설정된 빈 위치는 실제한 빈 위치와 동일한지 확인하십시오.
-
비전으로 빈 포즈 업데이트를 선택한 경우 Mech-Vision 프로젝트에서 인식된 빈 위치는 실제한 빈 위치와 동일한지 확인하십시오.
-
-
-
오류 원인2에 대해:
-
대상 물체 편집기에서 픽 포인트에 사용 가능한 말단장치가 올바르게 구성되었는지 확인합니다. 예를 들어, 다음 이미지의 PickPoint_2에 사용 가능한 말단장치는 Tool_Repositioning입니다.
-
Mech-Viz 프로젝트에서 "말단장치를 바꾸기" 스텝의 작업 모드에 따라 다음 옵션들을 각각 확인하십시오.
-
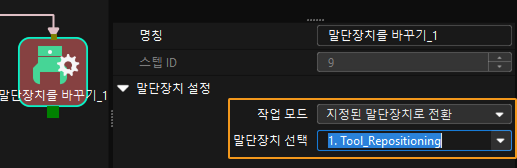
"말단장치를 바꾸기" 스텝의 작업 모드는 지정된 말단장치로 전환함이면 말단장치 선택에서 선택된 옵션은 말단장치 리스트에 있는 픽 포인트에 사용할 수 있는 말단장치인지 확인하십시오.
-
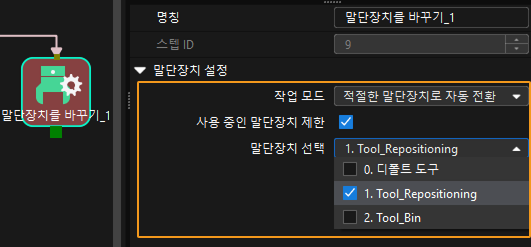
Mech-Viz 프로젝트에서 "말단장치를 바꾸기" 스텝의 작업 모드는 적합한 말단장치로 자동으로 전환됨이고 사용 중인 말단장체 제한함을 선택하면 말단장치 선택에서 선택된 옵션은 말단장치 리스트에 있는 픽 포인트에 사용할 수 있는 말단장치인지 확인하십시오.
-
-
-
오류 원인3에 대해:
-
Mech-Vision 프로젝트를 조정하여 출력된 비전 결과가 요구 사항을 충족하도록 하십시오.
-
"비전 이동" 스텝의 에서 비전 결과 필터링의 두 파라미터를 조정하여 픽 포인트가 지정된 범위 내에 있도록 하십시오.
-
2032
Mech-Viz: 적당한 팔레타이징을 위한 배치 위치가 없음
오류 원인:
-
트레이가 가득 찼으며 적당한 팔레타이징을 위한 배치 위치가 없음
점검 방법:
-
팔레타이징 유형 스텝의 "계획 실패" 아웃 포트에서 적당한 처리 논리를 추가하세요.
2036
Mech-Viz: '비전 인식' 스텝이 호출되지 않았음
오류 원인:
-
‘비전 이동’ 스텝에서 설정한 비전 서비스(‘비전 서비스 이름’ 파라미터 값)가 성공적으로 호출되지 않았고 Mech-Viz 프로젝트가 ‘비전 결과 체크’ 스텝의 ‘호출되지 않음’ 아웃 포트에 실행될 때 이 아웃 포트가 다른 스텝과 연결되지 않아 Mech-Viz 프로젝트 실행이 중단됩니다.
점검 방법:
-
Mech-Viz작업 흐름을 체크하여 ‘‘비전 결과 체크’ 스텝 이전의 ‘비전 이동’ 스텝에서 설정한 비전 서비스가 성공적으로 호출되는지 확인하십시오.
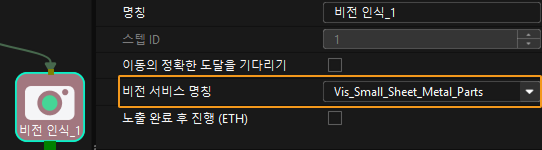
비전 서비스는 Mech-Viz 프로젝트에 해당하는 Mech-Vision 프로젝트의 이름입니다.(Mech-Vision 소프트웨어의 프로젝트 리스트에서 확인할 수 있습니다. 다음의 그림과 같습니다.) 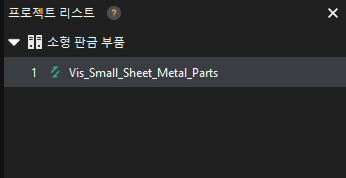
2037
Mech-Viz: 비전 서비스가 비전 결과를 출력하지 않았음
오류 원인:
-
‘비전 이동’ 스텝에서 설정한 비전 서비스(‘비전 서비스 이름” 파라미터 값)가 성공적으로 호출되지 않았고 Mech-Viz 프로젝트가 ‘ㅍ’ 스텝의 ‘호출되지 않음’ 아웃 포트에 실행될 때 이 아웃 포트가 다른 스텝과 연결되지 않아 Mech-Viz 프로젝트 실행이 중단됩니다.
점검 방법:
-
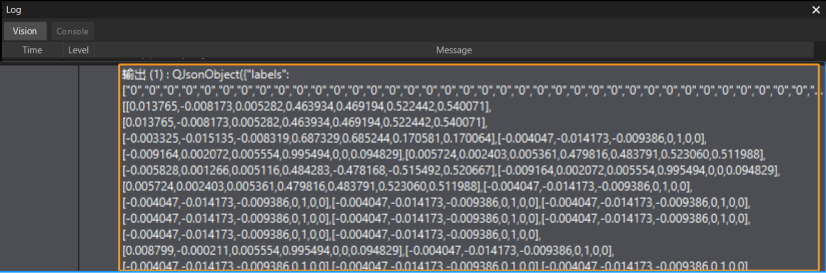
Mech-Viz 프로젝트 실행 중 Mech-Vision 소프트웨어의 로그 바에서 "출력" 스텝에 데이터가 있는지 확인하십시오. 아래 그림과 같이 표시됩니다. 데이터가 없으면 1002 문제 해결 방법을 참조하여 데이터 스트림을 체크하십시오.
-
Mech-Viz 프로젝트에서 "비전 결과 체크" 스텝의 "결과 없음" 아웃 포트에 후속 처리 스텝이 있는지 확인하십시오. 예를 들어, "알림" 스텝을 연결하십시오.
2038
Mech-Viz: ROI에 포인트 클라우드가 없음
오류 원인:
-
‘비전 이동’ 스텝에서 설정한 비전 서비스(‘비전 서비스 이름’ 파라미터 값)가 성공적으로 호출되지 않았고 Mech-Viz 프로젝트가 ‘‘비전 결과 체크’ 스텝의 ‘포인트 클라우드가 없음’ 아웃 포트에 실행될 때 이 아웃 포트가 다른 스텝과 연결되지 않아 Mech-Viz 프로젝트 실행이 중단됩니다.
점검 방법:
-
1003 상태 코드를 참조하여 해결하십시오.
2039
Mech-Viz: '비전 이동' 스텝이 비전 포즈를 수신하지 않았음
오류 원인:
-
‘비전 이동’ 스텝에서 발생한 오류는 다음과 같은 원인이 있습니다.
-
비전 서비스가 비전 결과를 제공하지 않았습니다.
-
비전 결과의 모든 포즈는 모두 계획에 사용되었습니다.
-
점검 방법:
-
1002 상태 코드를 참조하여 해결하십시오.
-
Mech-Viz 프로젝트에 ‘비전 결과 체크’ 스텝이 정확하게 사용되었는지 확인하십시오.
2041
Mech-Viz: 스텝 파라미터 값 획득 실패
오류 원인:
-
클라이언트 프로그램에서 ‘Mech-Viz스텝 파라미터 값 설정’ 명령을 호출할 때 오류가 발생했습니다.
점검 방법:
-
property_config파일에서 스텝 번호와 파라미터 이름이 정확하게 설정되었는지 확인하십시오.
| Mech-Vision툴 바의 menu:로봇 통신 설정 [다음 > 고급 설정]에서 *속성 설정*을 클릭하여 property_config파일을 엽니다. |
2042
Mech-Viz: 비전 이동의 계획 결과 획득 실패
오류 원인:
-
클라이언트 프로그램에서 ‘Mech-Viz비전 이동 계획 결과 또는 사용자 자체 정의 데이터 획득’ 명령을 호출할 때 오류가 발생했습니다.
점검 방법:
-
도움이 필요하면 Mech-Mind기술 서포트팀에게 문의하십시오.
2043
Mech-Viz: 사용자 자체 정의 데이터 획득 실패
오류 원인:
-
클라이언트 프로그램에서 ‘Mech-Viz비전 이동 계획 결과 또는 사용자 자체 정의 데이터 획득’ 명령을 호출할 때 오류가 발생했습니다.
점검 방법:
-
1024 상태 코드를 참조하여 해결하십시오.
2044
Mech-Viz: 비전 서비스가 등록되지 않았음
오류 원인:
-
Mech-Viz 프로젝트에서 ‘비전 인식’ 스텝이 비전 서비스를 정확하게 설정하지 않았습니다.
점검 방법:
-
‘비전 인식’ 스텝이 비전 서비스를 올바르게 설정하지 않았습니다.
통신 컴포넌트 오류 분석
3001
통신 컴포넌트: 무효한 명령어
오류 원인:
-
이 명령어는 비전 시스템에서 지원되지 않습니다.
점검 방법:
-
로봇 통신 구성에서 설정된 프로토콜을 체크하고 프로토콜 형식이 올바른지 확인하십시오. 동시에 클라이언트의 프로토콜을 체크하고 형식이 동일한지 확인하십시오.
-
클라이언트 프로그램에서 지침이 정확한지 확인하십시오.
3002
통신 컴포넌트: 명령어 파라미터의 데이터 길이 또는 포맷이 무효함
오류 원인:
-
클라이언트 프로그램에서 명령을 전송할 때 명령어의 데이터 길이가 비정상적이었습니다. 예를 들어 로봇 포즈 데이터가 6자리 미만이었습니다.
-
클라이언트 프로그램에서 명령을 전송할 때 명령의 포맷이 비정상적이었습니다. 예를 들어 중국어 쉼표를 구분자로 사용했습니다.
점검 방법:
-
클라이언트 프로그램에서 지침이 정확한지 확인하십시오.
3005
통신 컴포넌트: Mech-Vision 호출이 제한 시간을 초과했음
오류 원인:
-
비전 시스템이 gRPC서비스를 호출할 때 시간 초과가 발생했습니다.
점검 방법:
-
Mech-Vision소프트웨어를 리부팅해보십시오.
3006
통신 컴포넌트: 알 수 없는 오류
오류 원인:
-
비전 시스템에서 알 수 없는 오류가 발생했습니다.
점검 방법:
-
도움이 필요하면 Mech-Mind기술 서포트팀에게 문의하십시오.
3007
통신 컴포넌트: 클라이언트의 데이터 확인 신호 시간 초과했음
오류 원인:
-
통신 프로토콜로 PROFINET 또는 EtherNet/IP를 선택한 경우, 비전 시스템에서 새 포즈 데이터를 클라이언트에 전송하기 전에 지정된 시간 제한 기간(기본값 10초) 내에 Data_Acknowledge신호를 0으로 재설정하지 않은 경우 이 오류가 보고됩니다.
-
통신 프로토콜로 PROFINET 또는 EtherNet/IP를 선택한 경우, 비전 시스템에서 포즈 데이터를 클라이언트에 전송한 후에 지정된 시간 제한 기간(기본값 10초) 내에 클라이언트 프로그램에서 Data_Acknowledge신호를 1로 설정하지 않은 경우(클라이언트가 데이터를 읽었음을 나타냄) 이 오류가 보고됩니다.
-
통신 프로토콜로 Siemens PLC Snap7, Modbus TCP, Mitsubishi MC, PROFINET 또는 EtherNet/IP를 선택하고 “601 명령어 - 통지 메시지 가져오기”를 사용할 때, 규정된 제한 시간(기본 10초) 내에 클라이언트 프로그램이 다음 통지 메시지를 가져오기 전에 CLEAR_NOTIFY를 통해 주기 1회의 펄스 신호를 생성하여 NOTIFY 내용을 비우지 않으면 본 오류가 발생합니다.
-
통신 프로토콜로 PROFINET 또는 EtherNet/IP를 선택한 경우, 규정된 제한 시간(기본 10초) 내에 클라이언트 프로그램이 다음 카메라 노출 전에 RESET_EXPOSURE를 통해 EXPOSURE_COMPLETE 플래그를 리셋하지 않으면 본 오류가 발생합니다.
점검 방법:
-
통신 프로토콜로 PROFINET 또는 EtherNet/IP를 선택한 경우, ‘비전 결과 가져오기’ 명령 또는 ‘Mech-Viz계획 경로 가져오기’ 명령을 호출하기 전에 Data_Acknowledge신호가 0이 되도록 클라이언트 프로그램을 확인하십시오.
-
통신 프로토콜로 PROFINET 또는 EtherNet/IP를 선택한 경우, 비전 시스템에서 전송한 포즈 데이터를 읽은 후에 Data_Acknowledge신호가 1로 설정되도록 클라이언트 프로그램을 확인하십시오.
-
통신 프로토콜로 Siemens PLC Snap7, Modbus TCP, Mitsubishi MC, PROFINET 또는 EtherNet/IP를 선택하고 “601 명령어 - 통지 메시지 가져오기”를 사용할 때, 클라이언트 프로그램을 점검하여 다음 통지 메시지를 가져오기 전에 CLEAR_NOTIFY를 통해 주기 1회의 펄스 신호를 생성해 NOTIFY 내용을 비우는지 확인하십시오.
-
통신 프로토콜로 PROFINET 또는 EtherNet/IP를 선택한 경우, 클라이언트 프로그램을 점검하여 다음 카메라 노출 전에 RESET_EXPOSURE를 통해 주기 1회의 펄스 신호를 생성해 EXPOSURE_COMPLETE 플래그를 리셋하는지 확인하십시오.
외부 캘리브레이션 오류 분석
7001
캘리브레이션: 파라미터 오류
오류 원인:
-
클라이언트 프로그램이 캘리브레이션 프로세스를 실행할 때 비전 시스템으로 전송된 로봇 포즈 데이터 오류는 다음과 같이 분류될 수 있습니다.
-
관절 각도 데이터가 6자리 미만입니다.
-
플랜지 포즈 데이터가 6자리 미만입니다.
-
플랜지 포즈 데이터가 모두 0입니다.
-
| 로봇은 기본적으로 6축 로봇으로 설정되어 있습니다. 4축 또는 5축 로봇인 경우 0을 사용하여 포즈 데이터의 나머지 필드를 채우십시오. |
점검 방법:
-
클라이언트 프로그램에서 전송한 로봇 포즈 데이터가 장확한지 확인하십시오.
7002
캘리브레이션: Mech-Vision이 캘리브레이션 플랜지 포즈를 제공하지 않았음
오류 원인:
-
캘리브레이션 프로세스에서 Mech-Vision이 다음 캘리브레이션 포인트의 플랜지 포즈를 로봇으로 전송하지 않았습니다.
점검 방법:
-
도움이 필요하면 Mech-Mind기술 서포트팀에게 문의하십시오.