KUKA 로봇의 경우 표준 인터페이스 프로그램이 백그라운드에서 실행하는 방법
KUKA 로봇의 경우 메인 프로그램이 서브 프로그램을 호출할 때 메인 프로그램은 포그라운드 프로그램에 속하고 서브 프로그램은 백그라운드 프로그램에 속하며 로봇 시스템이 부팅된 후 자동으로 실행되어야 합니다. 다음에서는 KUKA 로봇에서 표준 인터페이스 백그라운드 프로그램을 생성하고 백그라운드 실행을 구현하는 방법을 설명합니다.
| 시작하기 전에 KUKA 표준 인터페이스 통신 구성을 완료했는지 확인하십시오. |
백그라운드 프로그램을 생성하고 실행하기
-
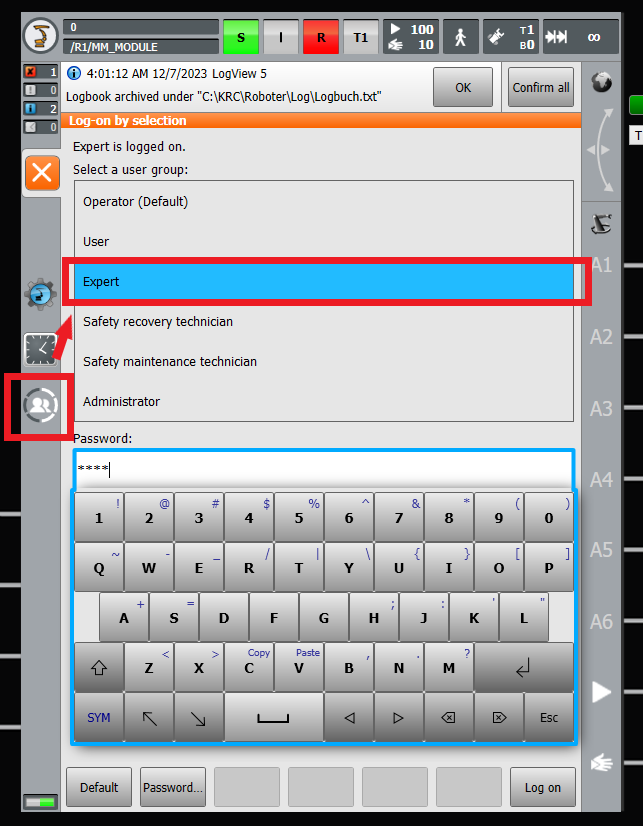
사용자 그룹 아이콘을 클릭하여 사용자 그룹 레벨을 Expert로 전환하고 기본 비밀번호는 kuka입니다.
-
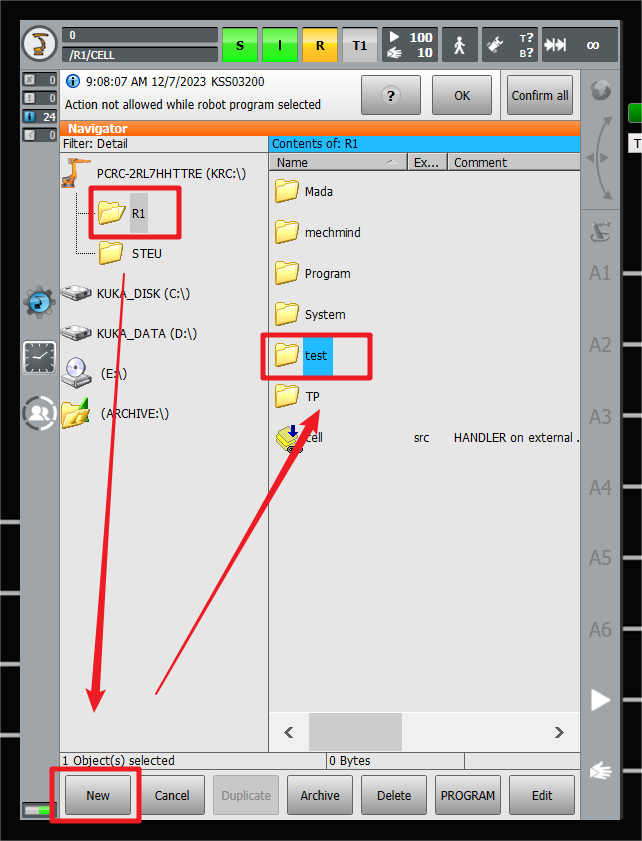
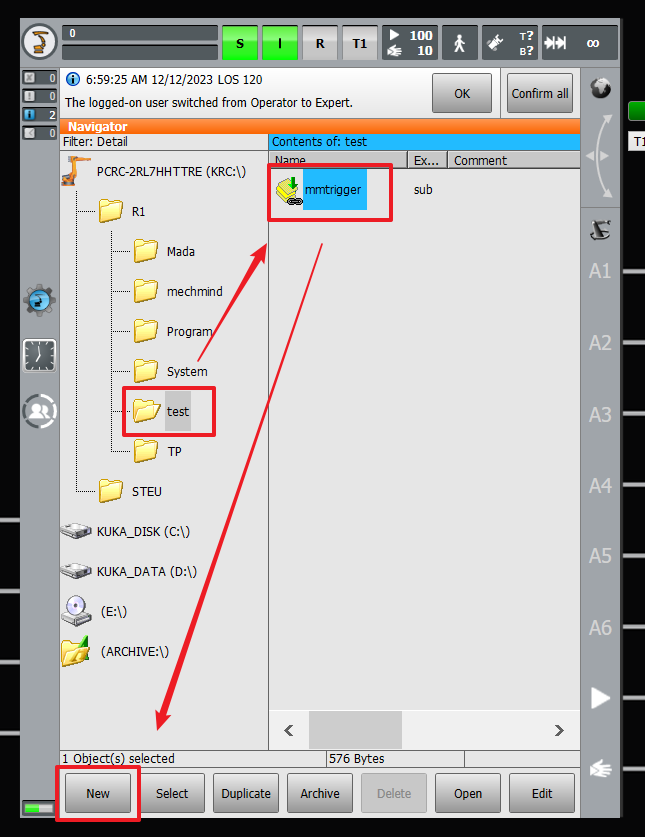
R1 폴더를 선택하고 왼쪽 하단의 새로 만들기를 클릭하여 프로그램을 저장할 새 폴더를 생성합니다. 여기서는 폴더 이름을 test로 설정합니다.
-
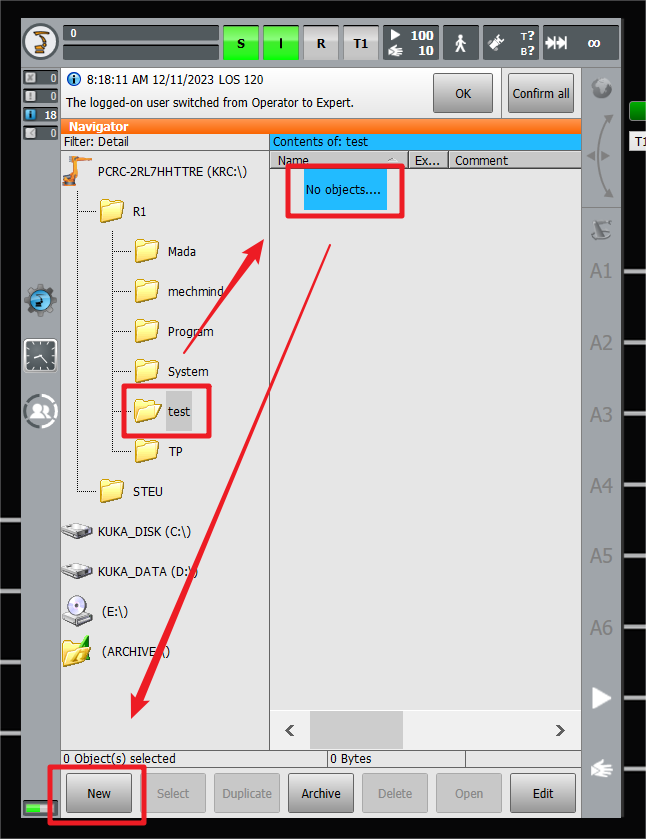
test 폴더에서 오른쪽에 있는 대상 없음을 선택하고 왼쪽 하단의 새로 만들기를 클릭하면 모델 선택을 열 수 있습니다.
-
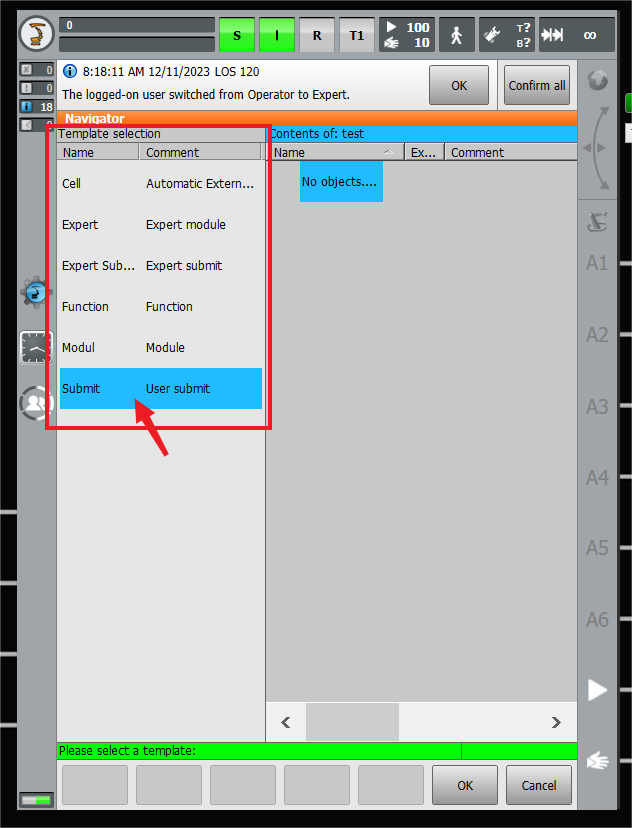
모델 선택에서 Submit을 더블 클릭하여 백그라운드 실행용 로봇 Submit 프로그램을 생성합니다.
-
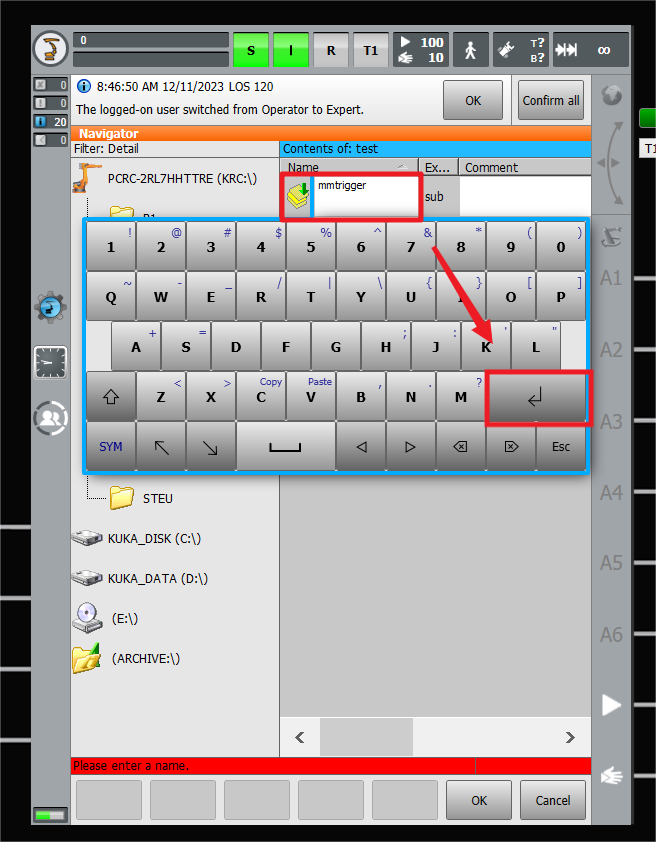
프로그램 이름을 입력하고 ENTER 키를 눌러 저장합니다. 여기서는 프로그램 이름을 mmtrigger로 설정합니다.
-
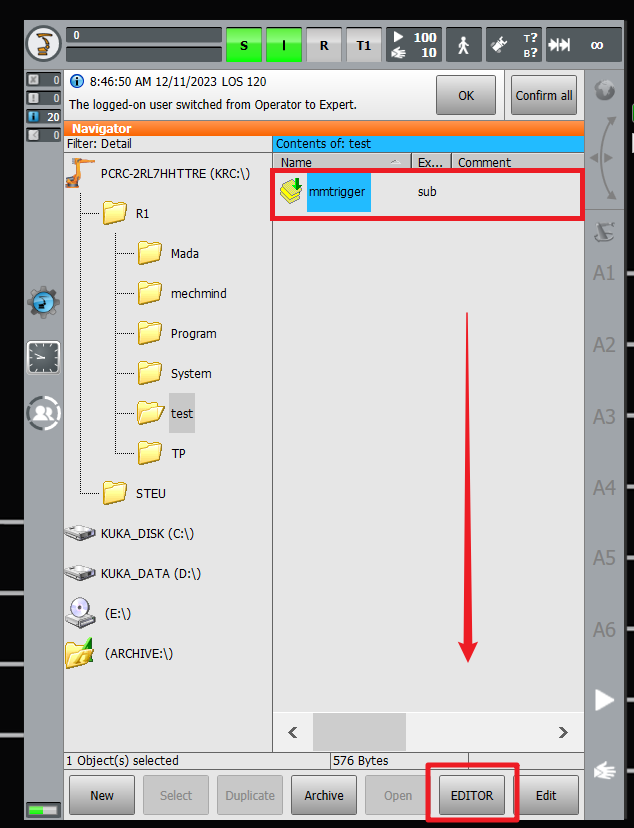
새로 생성한 mmtrigger 프로그램 파일을 선택한 후, 편집기를 클릭하면 프로그램을 작성할 수 있습니다.
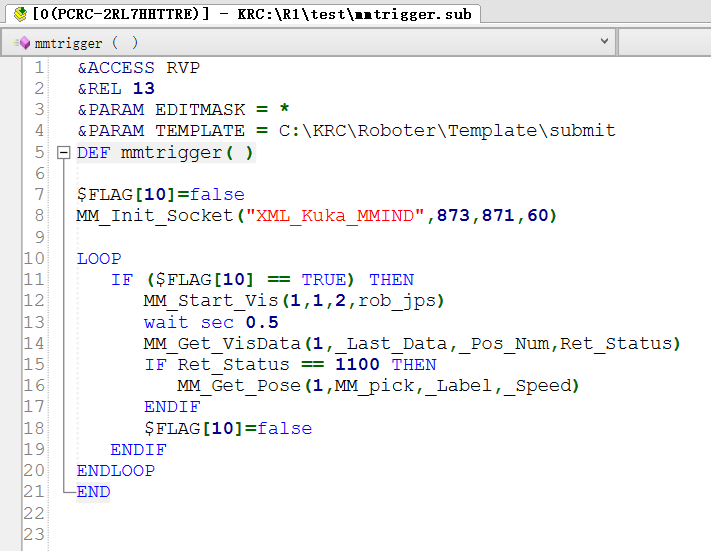
예를 들어, 그림의 샘플 코드는 Mech-Vision 프로젝트 실행을 트리거하고 비전 결과를 획득하기를 의미합니다.
-
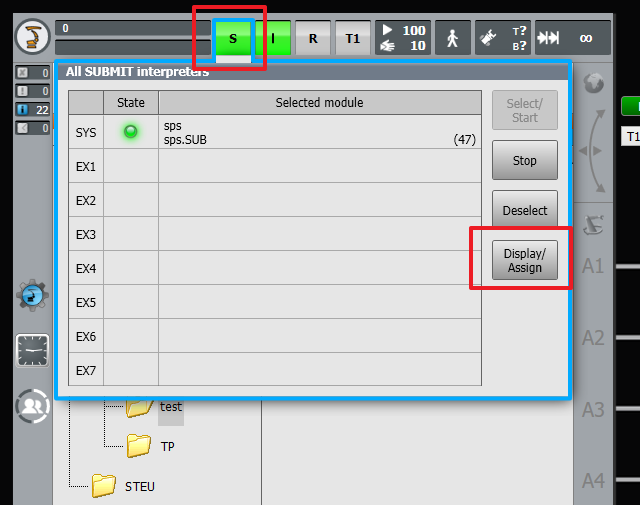
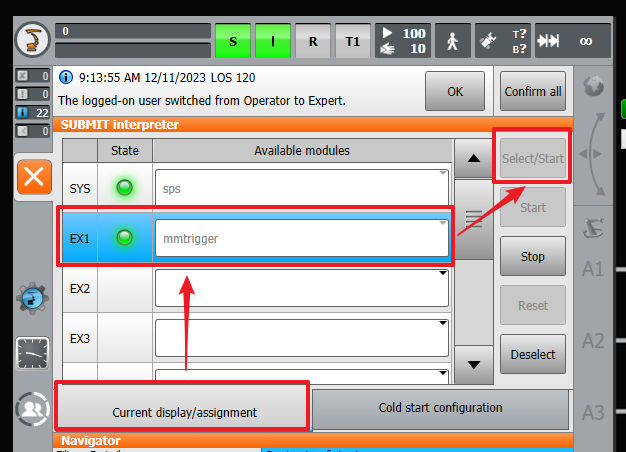
S 아이콘을 클릭하여 SUBMIT 인터프리터를 열고 표시/할당을 클릭한 후 설정 인터페이스에 들어갑니다.
-
현재 표시/할당에서 EX1 항목에 mmtrigger 프로그램을 선택하고 선택/시작을 클릭하면 백그라운드 프로그램이 시작됩니다.
-
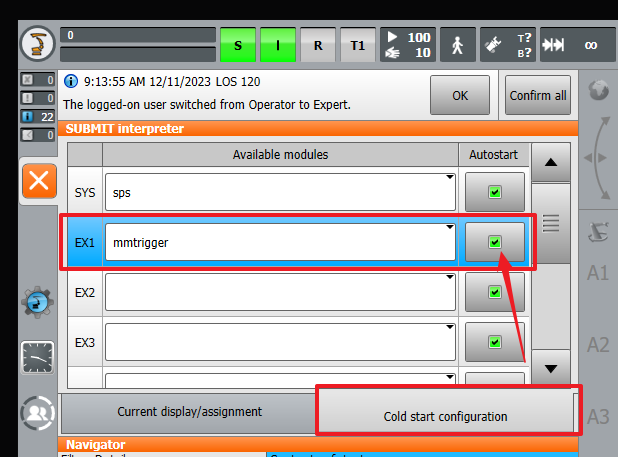
콜드 부트 설정에서 EX1 항목에 mmtrigger 프로그램을 선택하고 자동 시작을 활성화하면 백그라운드 프로그램이 자동으로 시작됩니다.
포그라운드 프로그램을 생성하고 실행하기
-
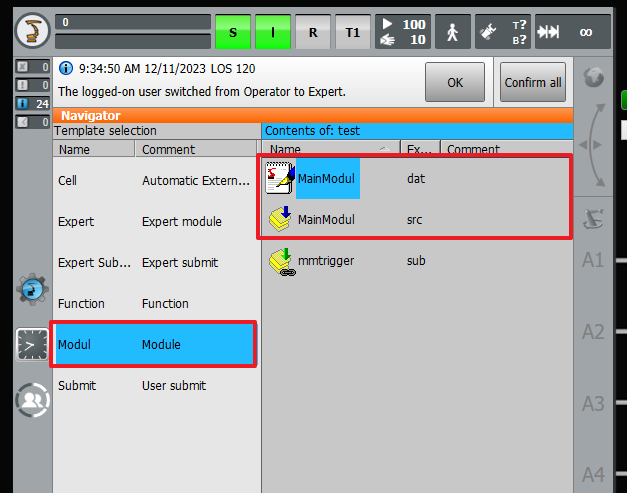
test 폴더를 열고 오른쪽 mmtrigger 프로그램 파일을 선택하고 왼쪽 하단의 새로 만들기를 클릭하면 모델 선택을 열 수 있습니다.
-
모델 선택에서 Modul을 더블 클릭하여 새로운 모듈 프로그램을 생성합니다. 여기서는 프로그램 이름을 MainModul로 설정합니다.
-
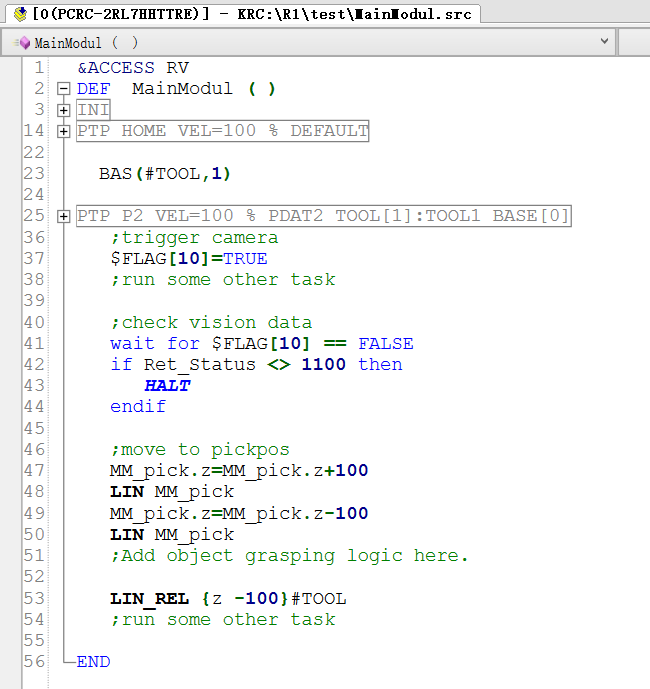
새로 생성한 MainModul.src 프로그램 파일을 선택한 후, 편집기를 클릭하면 프로그램을 작성할 수 있습니다.

예를 들어 그림의 샘플 코드는 $FLAG[10]이 TURE인 경우 포그라운드 프로그램이 백그라운드 프로그램을 호출함을 의미합니다.
-
백그라운드 프로그램이 실행 중인지 확인한 후 위의 포그라운드 프로그램을 실행합니다. 구체적인 실행 방법은 캘리브레이션 프로그램 실행을 참조하십시오.