통신 방식 소개
비전 시스템 하드웨어를 설정한 후 Mech-Mind 비전 시스템과 외부 장치(예: 로봇, PLC 또는 호스트 컴퓨터) 간의 데이터 교환을 관리하기 위해 통신 방식을 선택해야 합니다. Mech-Mind 비전 시스템은 다음 세 가지 통신 방식을 지원합니다:
| 표준 인터페이스 통신과 Adapter 통신은 모두 인터페이스 통신 범주에 속합니다. |
마스터 컨트롤 통신
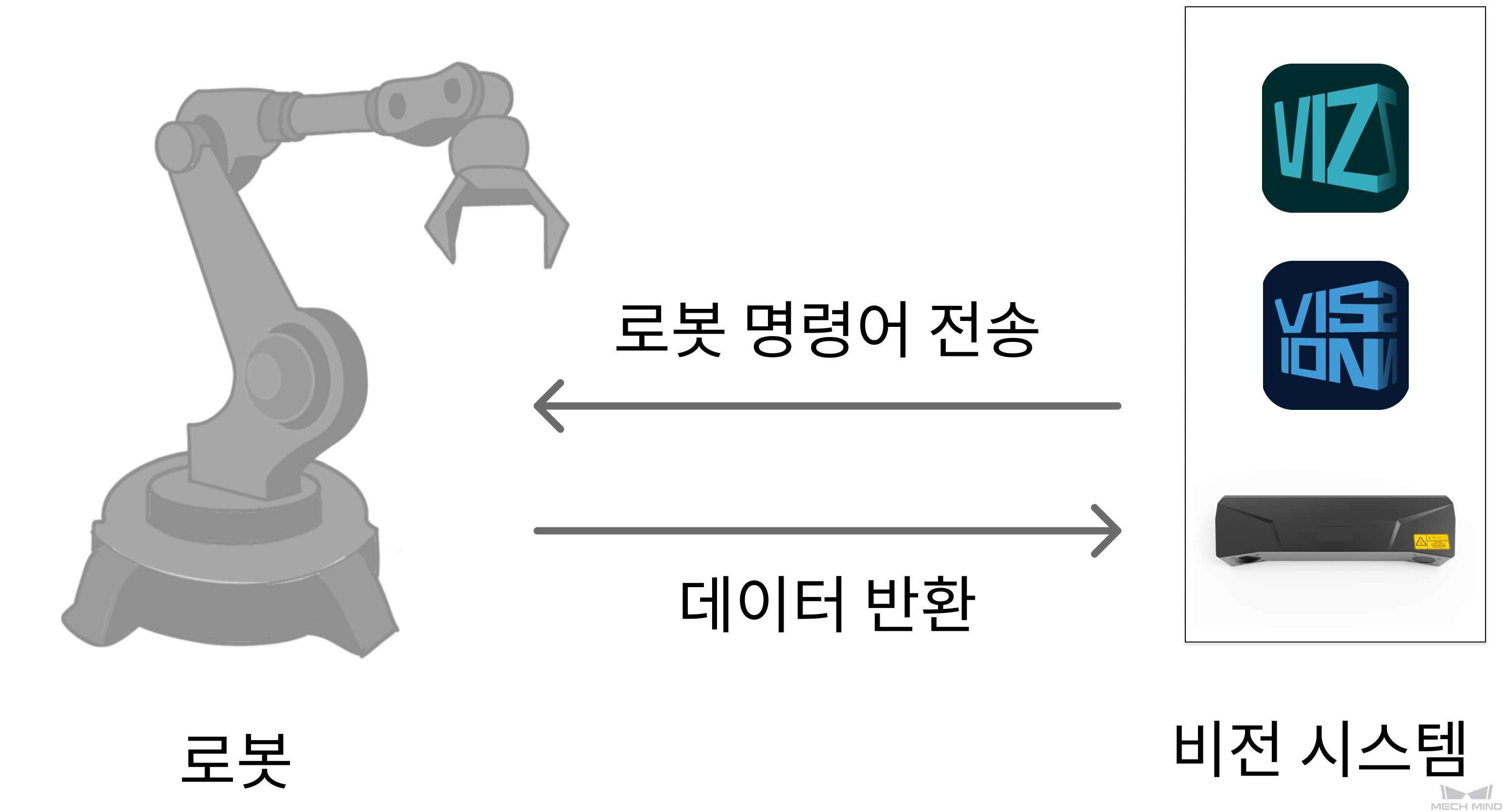
마스터 컨트롤 통신에서는 비전 시스템이 로봇을 제어하여 작업을 수행할 수 있습니다. 이 경우 비전 시스템은 제어하는 쪽이고 로봇은 제어되는 쪽입니다. 아래 그림과 같이 마스터 컨트롤 통신인 경우, 비전 시스템은 로봇에 명령어를 보내고 로봇은 수신한 명령어를 모니터링하고 실행합니다.
|
마스터 컨트롤 통신은 두 가지 방식으로 구현할 수 있습니다.
-
로봇은 마스터 컨트롤 프로그램을 플래시(가져오기)해야 합니다.
이런 경우에는 로봇이 플래시된 마스터 컨트롤 통신 프로그램을 계속 실행해야 비전 시스템이 로봇을 제어할 수 있습니다. ABB, FANUC, KUKA 로봇은 이 방식을 사용하여 마스터 컨트롤 통신을 구현합니다.
-
로봇은 마스터 컨트롤 프로그램을 플래시(가져오기)할 필요가 없습니다.
이 방식을 사용하면 로봇을 원격 제어 모드로 전환해야 하며, 비전 시스템은 로봇 본체에서 제공하는 SDK(Software Development Kit)를 사용하여 로봇에 별도의 포그라운드 프로그램을 로드하고 실행하지 않고도 로봇을 직접 제어할 수 있습니다. AE, JAKA 등 로봇은 이 방식을 사용하여 마스터 컨트롤 통신을 구현합니다.
표준 인터페이스 통신
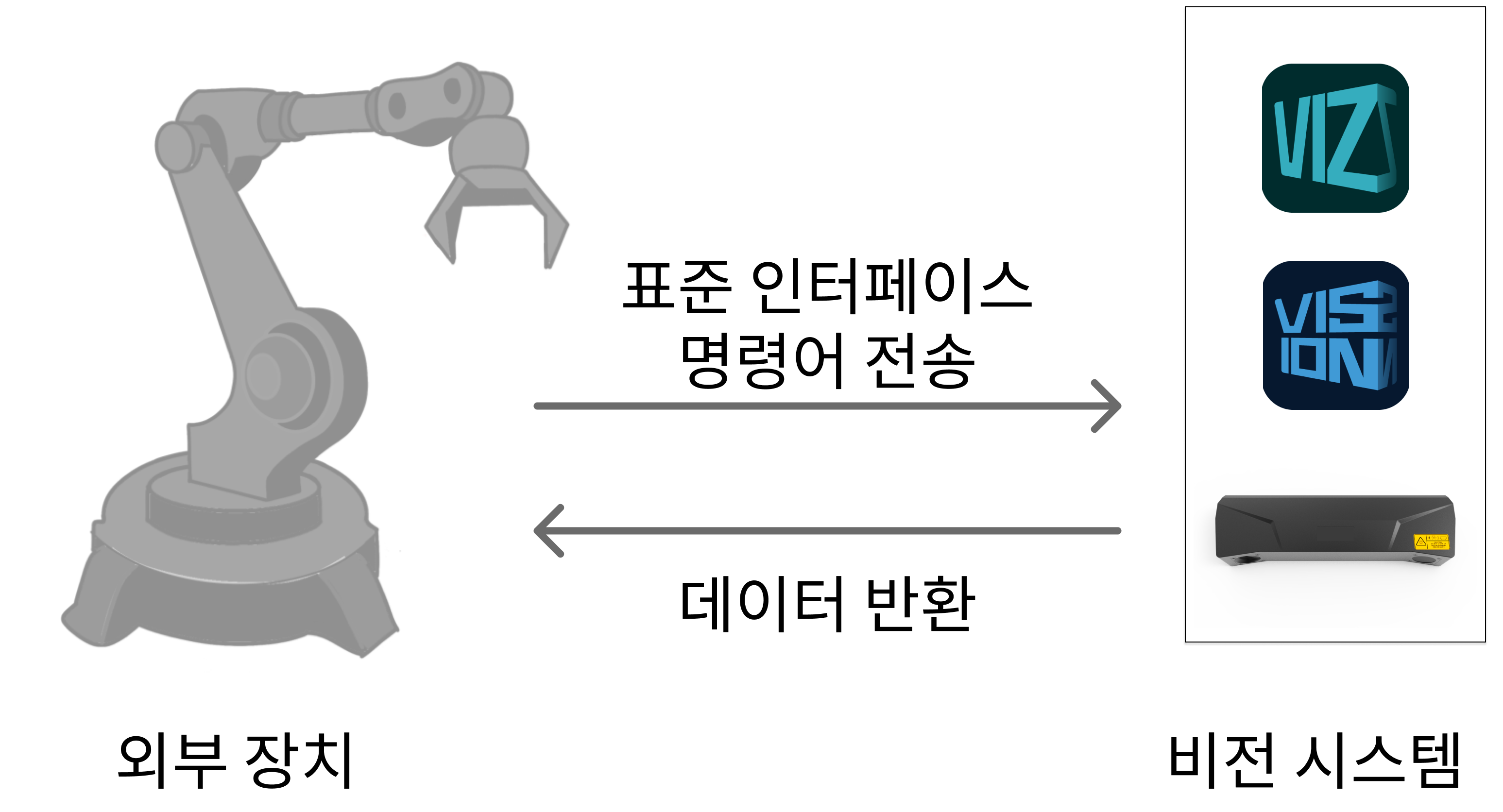
비전 시스템이 외부 장치(예: 로봇, PLC 또는 호스트 컴퓨터 등)와 통신할 때 외부 장치가 비전 시스템에 표준 인터페이스 명령어를 전송하고 비전 시스템이 해당 명령어를 수신한 후 해당 데이터를 반환하는 경우, 이러한 통신 방식을 표준 인터페이스 통신이라고 합니다. 아래 그림과 같습니다. 표준 인터페이스 통신 방식에서 비전 시스템은 외부 장치의 명령어에 응답하여 데이터만 전송하고 외부 장치를 제어하지는 않습니다. 이러한 이유로 외부 장치가 비전 시스템과 통신할 수 있도록 외부 장치 측 프로그램을 작성해야 합니다.
|
표준 인터페이스 명령어는 Mech-Mind가 표준 통신 프로토콜을 기반으로 개발한 명령어이며, 명령어 요청 및 응답 데이터 형식을 정의합니다. 이러한 명령어를 통해 Mech-Vision 또는 Mech-Viz 프로젝트를 설정하고 Mech-Vision 또는 Mech-Viz 프로젝트에서 출력한 결과를 반환할 수 있습니다. |
표준 인터페이스 통신은 다음 두 가지 방식으로 구현할 수 있습니다.
-
Mech-Mind 비전 시스템에서 해당 외부 장치를 지원하는 경우, 표준 인터페이스 명령어를 직접 사용할 수 있습니다. 자세한 내용은 표준 인터페이스 통신 일람표를 참조하십시오.
-
Mech-Mind 비전 시스템에서 해당 외부 장치를 지원하지 않는 경우, 사용자가 표준 인터페이스 개발자 매뉴얼에 따라 해당 표준 인터페이스 명령어를 작성해야 표준 인터페이스 통신을 수행할 수 있습니다.
Adapter 통신
비전 시스템이 외부 장치(예: 로봇, PLC 또는 호스트 컴퓨터 등)와 통신할 때 외부 장치가 비전 시스템에 사용자 정의 명령어를 전송하고 비전 시스템이 해당 명령어를 수신한 후 해당 데이터를 반환하는 경우, 이러한 통신 방식을 “Adapter 통신”이라고 합니다. 아래 그림과 같습니다. Adapter 통신에서는 통신 양측에서 사용할 사용자 정의 명령어를 정의해야 하므로 비전 시스템과 외부 장치 측 프로그램을 모두 작성해야 합니다.
|
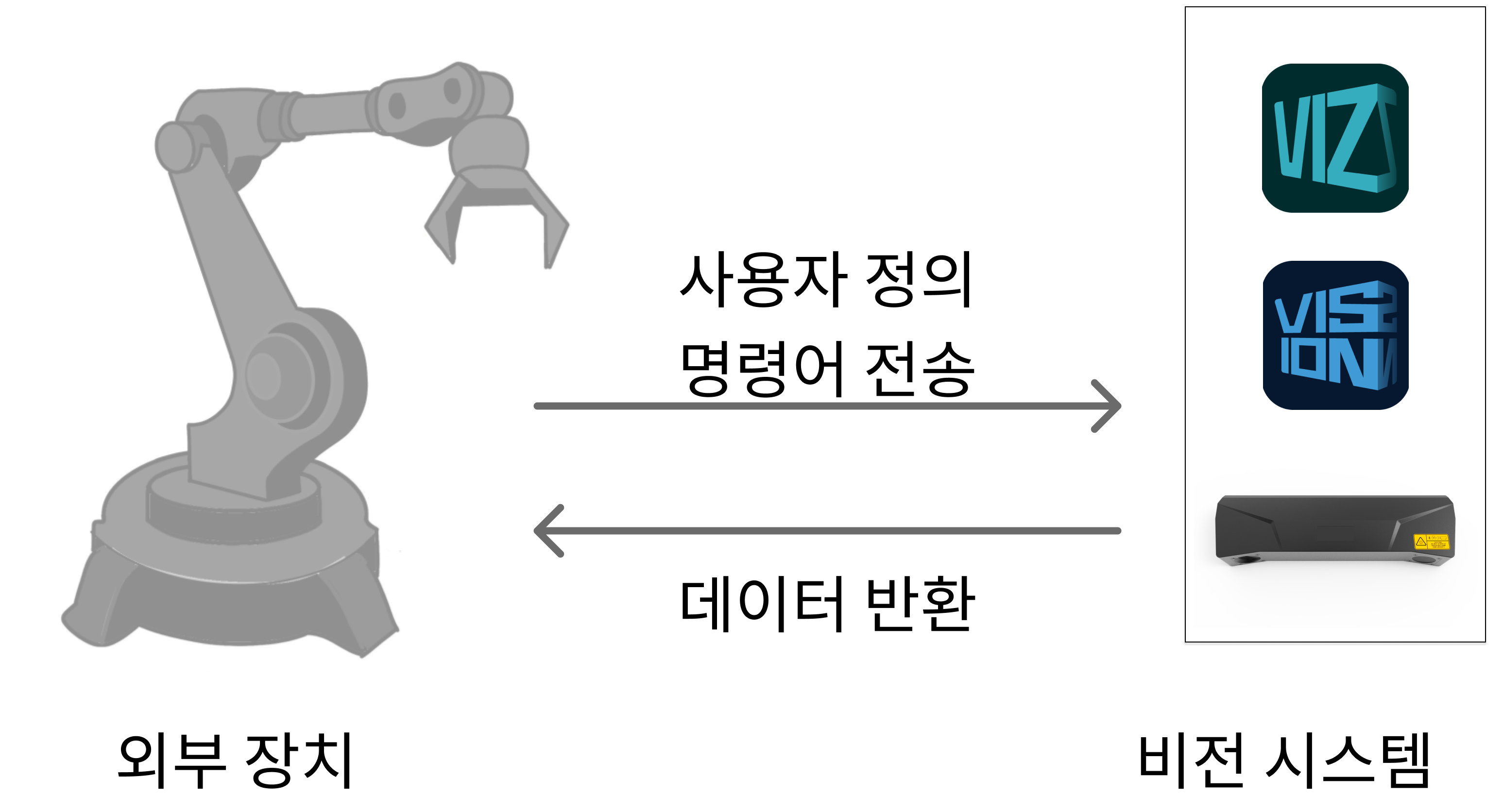
Adapter 통신은 다음 두 가지 방식으로 구현할 수 있습니다. 두 가지 방식은 모두 Python 프로그램을 기반으로 합니다.
-
Adapter 생성기를 통해 통신 양측에서 사용할 명령어 형식을 빠르게 구성할 수 있습니다. 생성된 명령어가 요구 사항을 충족하지 못하면 Python 프로그래밍을 통해 확장할 수 있습니다.
-
Adapter 프로그래밍 가이드 내용을 참조하여 처음부터 통신 양측에서 사용할 명령어 형식을 개발합니다.
통신 방식 비교
이 부분에서는 이해를 돕기 위해 세 가지 통신 방식을 비교하고 각 방식의 기능과 적용 가능한 시나리오를 소개합니다.
우선 통신 대상과 명령어 송수신 측면에서 세 가지 통신 방식의 차이점은 아래 표에 나와 있습니다.
| 통신 방식 | 명령어 형식 | 명령어 전송자 | 명령어 수신자 |
|---|---|---|---|
마스터 컨트롤 통신 |
로봇 명령어 |
비전 시스템 |
로봇 |
표준 인터페이스 통신 |
표준 인터페이스 명령어 |
외부 장치(예: 로봇, PLC 또는 호스트 컴퓨터 등) |
비전 시스템 |
Adapter 통신 |
사용자 정의 명령어 |
외부 장치(예: 로봇, PLC 또는 호스트 컴퓨터 등) |
비전 시스템 |
또한, 세 가지 통신 방식은 지원되는 프로토콜, 사용 난이도 및 유연성이 다릅니다. 아래 표와 같습니다.
| 통신 방식 | 지원되는 프로토콜 | 프로그램을 작성해야 함 | 사용 난이도 | 유연성 |
|---|---|---|---|---|
마스터 컨트롤 통신 |
TCP, UDP |
프로그램이 필요하지 않음 |
초급 |
초급 |
표준 인터페이스 통신 |
TCP UDP Siemens PLC Snap7 PROFINET EtherNet/IP Modbus TCP Mitsubishi MC |
외부 장치 측 프로그램 작성 필요 |
중급 |
중급 |
Adapter 통신 |
TCP UDP HTTP WebSocket Siemens PLC Snap7 PROFINET EtherNet/IP Modbus TCP Mitsubishi MC 다른 통신 프로토콜 |
비전 시스템과 외부 장치 측 프로그램 모두 작성 필요 |
높음 |
높음 |
그리고 세 가지 통신 방식은 지원되는 시나리오가 다릅니다.
| 통신 방식 | 부품 로드 시나리오 | 디팔레타이징/팔레타이징 시나리오 | 로케이팅/어셈블리 시나리오 | 피스 피킹 시나리오 | 접착제 도포 시나리오 |
|---|---|---|---|---|---|
마스터 컨트롤 통신 |
√ |
√ |
√ |
√ |
√ |
표준 인터페이스 통신 |
√ |
√ |
√ |
√ |
× |
Adapter 통신 |
√ |
√ |
√ |
√ |
√ |
세 가지 통신 방식을 숙지한 후 실제 프로젝트 요구 사항에 따라 적합한 통신 방식을 선택합니다.