YASKAWA 로봇 기본 조작
이 장에서는 YASKAWA 로봇의 기본 조작에 대해 설명합니다.
비전 포인트에서 말단장치 설정
다음 작업에서는 P071 위치 레지스터를 예로 들어 1번 말단장치를 설정합니다.
| 0번 말단장치의 포즈 데이터는 모두 0이어야 합니다. 즉, 0번 말단장치 포즈는 플랜지 포즈여야 하며 0번 말단장치 포즈 값은 변경하지 마십시오. |
-
티치 모드에서 프로그램을 선택한 뒤 을 클릭합니다.
-
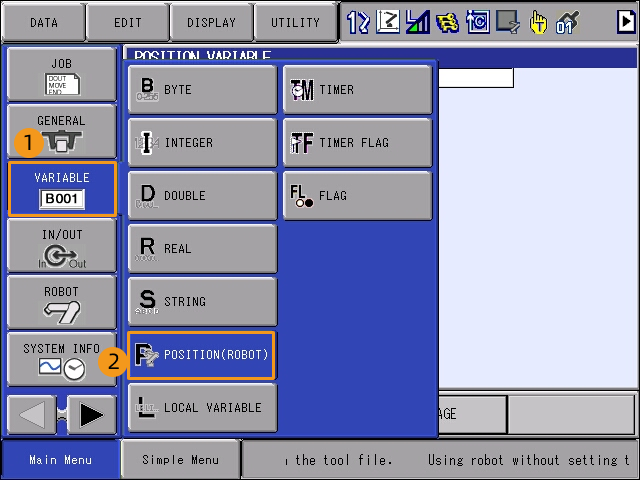
POSITION VARIABLE 인터페이스에서 *PAGE*를 클릭합니다.

-
키보드 패널이 나타나면 Dec*를 선택한 다음 *71(P071 위치 레지스터)을 입력하고 *Enter*를 클릭합니다.

-
“#P071” 옆의 빈 칸을 클릭해 좌표계를 선택하고, 드롭다운 메뉴에서 *ROBOT*을 선택합니다.

-
TOOL*을 클릭하고 팝업된 키보드 패널에서 *1(1번 말단장치 사용)을 입력한 후 *Enter*를 클릭합니다.
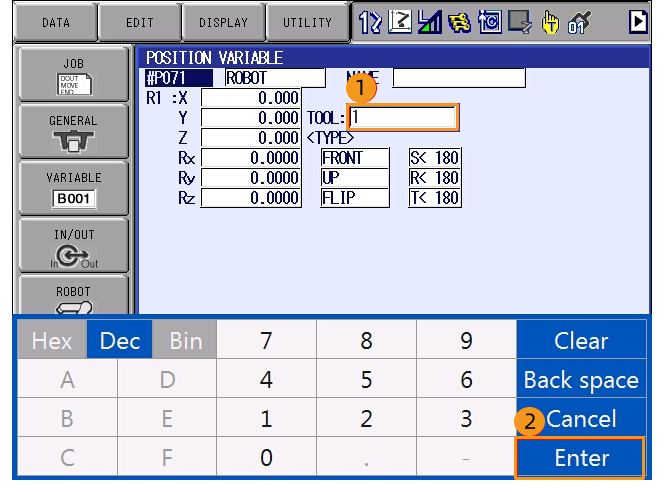
설정이 완료되면 아래와 같은 화면이 표시됩니다.
