샘플 프로그램5: MMS5VIZUSER
프로그램 소개
기능 설명 |
로봇이 Mech-Vision 프로젝트 실행을 트리거하고 계획 경로를 획득하여 피킹 및 배치 작업을 수행합니다. |
파일 경로 |
Mech-Vision 및 Mech-Viz의 설치 디렉터리로 이동하여 |
필요한 프로젝트 |
|
사용 조건 |
|
| 이 샘플 프로그램은 참고용으로 제공됩니다. 사용자는 실제 상황에 맞춰 이 내용을 바탕으로 수정해야 하며, 해당 프로그램을 그대로 사용하지 않도록 하십시오. |
프로그램 설명
다음에는 MMS5VIZUSER 샘플 프로그램의 코드와 관련 설명입니다.
#Include "MMMODULE"
MM_DROP_COM()
Mcomnum = 7
MM_INIT_COM(Mcomnum)
Tool P_NTool
PMTool=(+0.00,+0.00,+0.00,+0.00,+0.00,+0.00)
Tool PMTool
MM_SET_MOD(1,1,MM_Status)
If MM_Status <> 1107 Then
Hlt
EndIf
MM_START_VIZ(1,JntSend,MM_Status)
If MM_Status <> 2103 Then
Hlt
EndIf
MM_SET_BCH(1,1,MM_Status)
If MM_Status <> 2105 Then
Hlt
EndIf
Dim MM_Result(10,9)
Dim MM_VisionInfo(10,21)
Dim MM_VisionData(21)
MM_GET_VMD (0,2,4,MM_Status,MM_VisionPt_Num,MM_VPos_Num,MM_Result,MM_VisionInfo)
If MM_Status <> 2100 Then
Hlt
EndIf
MM_GET_VMP(MM_Result,MM_VisionInfo,1,PPick,MM_MotionType,MM_ToolID,MM_Velocity,MM_VisionData)
MM_DROP_COM()
PPick_pre=PPick
PPick_pre.Z=PPick_pre.Z+100
Mov PPick_pre
Fine 0,P
Mvs PPick
Hlt
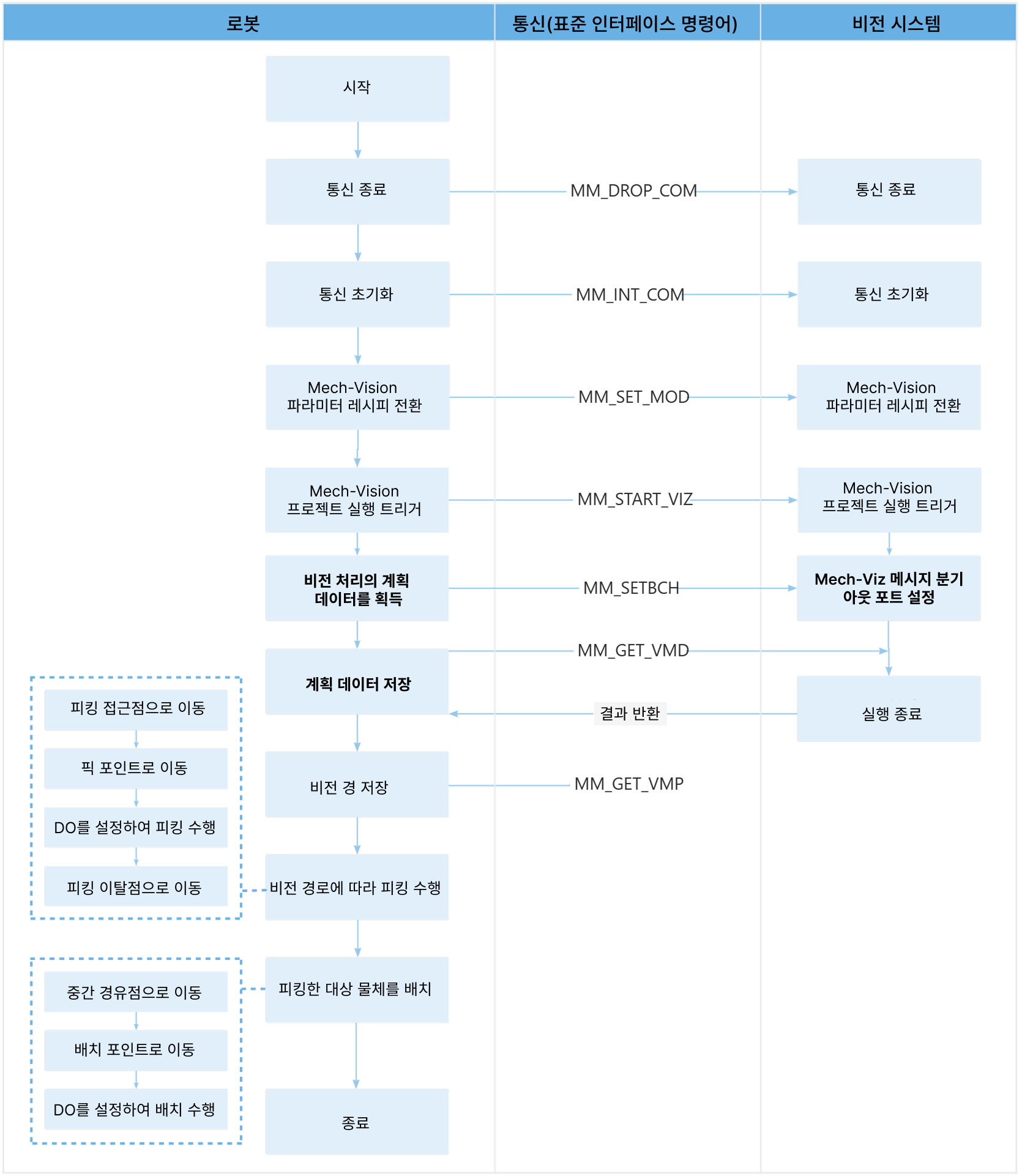
Mvs PPick_pre위 샘플 프로그램 코드에 해당하는 워크플로는 아래 그림에 표시되어 있습니다.
아래 표는 위 프로그램에 대한 설명입니다. 명령어 이름의 링크를 클릭하면 해당 명령의 상세 설명을 확인할 수 있습니다.
| 워크플로 | 코드와 설명 | ||
|---|---|---|---|
MM_Module 헤더 파일 가져오기 |
|
||
초기화 및 통신 구축하기 |
먼저 통신을 종료한 후 다시 연결하여 연결 중인 프로젝트가 없는지 확인합니다. |
||
제어점을 초기값으로 되돌리고 도구 변수를 선언하기 |
|
||
Mech-Vision 파라미터 레시피를 전환하고 상태 코드를 확인하기 |
|
||
Mech-Viz 프로젝트 실행을 트리거하기 |
이 명령어는 로봇이 비전 시스템을 트리거하여 Mech-Viz 프로젝트를 실행한 후, Mech-Vision가 출력한 비전 결과를 기반으로 Mech-Viz는 로봇의 피킹 경로를 계획한다는 것을 나타냅니다.
|
||
Mech-Viz 메시지 분기 아웃 포트를 설정하기 |
|
||
저장 컨테이너 정의 및 선언하기 |
|
||
계획 경로를 획득하기 |
이 전체 명령어는 Mech-Vision 항목 0에서 계획 경로와 비전 처리를 통해 이동한 계획 결과를 가져오는 것을 의미합니다.
|
||
계획 경로를 저장하기 |
이 명령어는 첫 번째 비전 포인트의 말단장치 포즈, 라벨 및 말단장치 번호를 각각 지정된 변수에 저장합니다. |
||
통신을 끊기 |
|
||
접근점과 이탈점을 설정하기 |
PPick의 값을 PPick_pre에 대입하고, PPick_pre의 z축 높이에 200을 더하여 접근점과 이탈점으로 사용합니다. |
||
피킹 접근 웨이 포인트로 이동하기 |
피킹 접근점으로 이동하고, 절대 위치 도달을 설정합니다. |
||
피킹 웨이 포인트로 이동하기 |
로봇은 직선 이동 방식으로 피킹 접근 웨이 포인트에서 피킹 웨이 포인트로 이동합니다.
|
||
피킹 이탈 웨이 포인트로 이동하기 |
로봇이 피킹 웨이 포인트 상단으로 이동하며, 피킹 이탈 웨이 포인트에 도달합니다.
|