FANUC CRX 인터페이스 명령어 설명
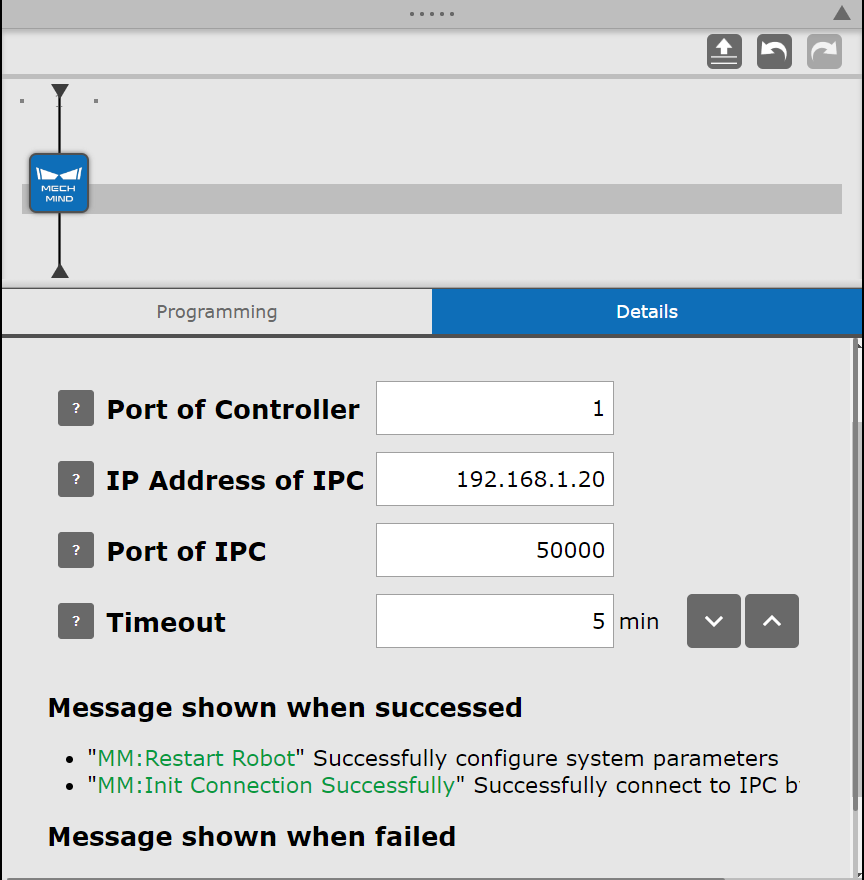
Mech-System 통신 초기화
이 명령어는 IPC 통신 주소와 포트를 설정하는 데 사용됩니다.
파라미터 설명
| 파라미터 | 설명 |
|---|---|
컨트롤러 네트워크 포트 번호 |
컨트롤러와 IPC 간의 통신에 사용된 네트워크 포트 번호 |
IPC의 IP 주소 |
IPC의 IP 주소 |
IPC 포트 |
Mech-Vision에서 구성된 포트 번호 |
타임아웃 제한 |
타임아웃 대기 시간 (단위는 min) |
| 설정을 변경할 필요가 없는 경우 사용자는 CRX 플러그인을 설치한 후 통신을 한 번만 구성하면 됩니다. 후속 캘리브레이션 및 정상적인 사용 중에는 통신 구성을 다시 수행할 필요가 없습니다. |
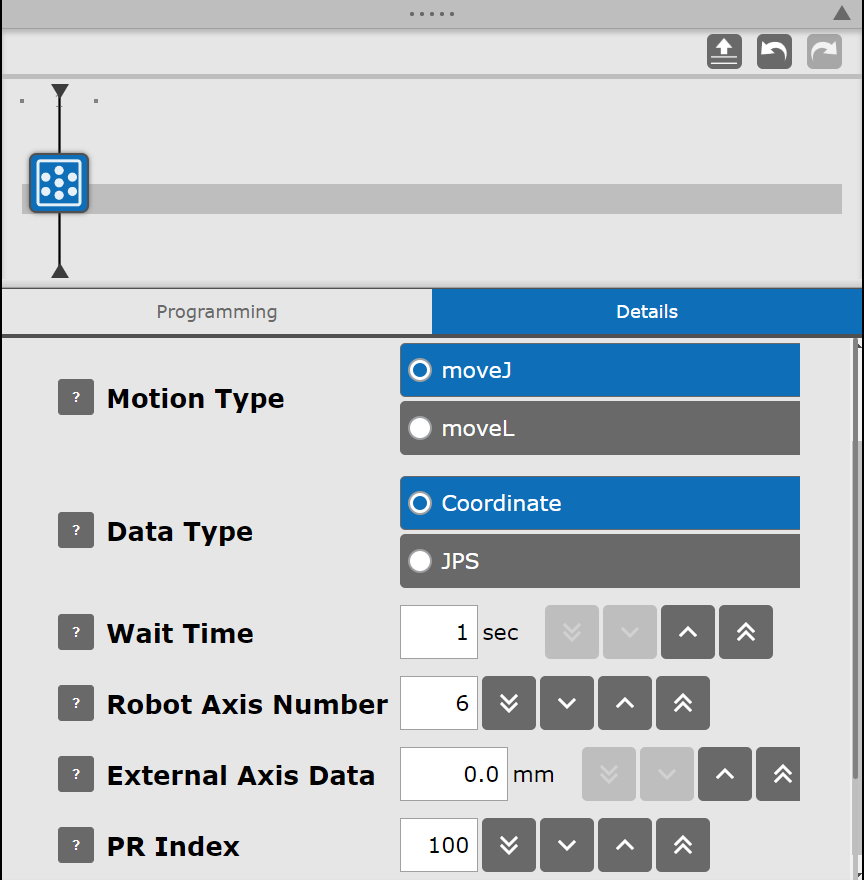
Mech-Eye 카메라 캘리브레이션
이 명령어는 카메라 외부 파라미터의 자동 캘리브레이션을 수행하는 데 사용됩니다. Mech-Vision 소프트웨어의 카메라 캘리브레이션 기능과 함께 사용하면 완전 자동 캘리브레이션을 구현할 수 있습니다.
파라미터 설명
| 파라미터 | 설명 |
|---|---|
이동 방식 |
자동 캘리브레이션 프로세스에서 로봇의 이동 방식을 지정합니다. 사용자는 직선 운동이나 관절 각도 운동을 선택할 수 있습니다. |
데이터 유형 |
로봇이 전송한 포즈 유형입니다(관절 각도 데이터 또는 좌표 데이터). |
대기 시간 |
로봇이 캘리브레이션 포인트 위치로 이동한 후 흔들림을 피하기 위해 기다리는 시간입니다. 일반적으로 1~5s로 설정합니다. |
로봇 축 수 |
기본 축 수는 6이고 로봇에 7번째 축이 있는 경우 7로 설정해야 합니다. |
외부 축 데이터 |
7축이 있는 로봇을 지원하기 위해, 이 값은 캘리브레이션 시 7축이 고정된 위치 데이터로 설정됩니다. |
PR 레지스터 번호 |
이 값은 캘리브레이션 시작점 위치를 저장하는 레지스터의 번호로 설정해야 합니다. |
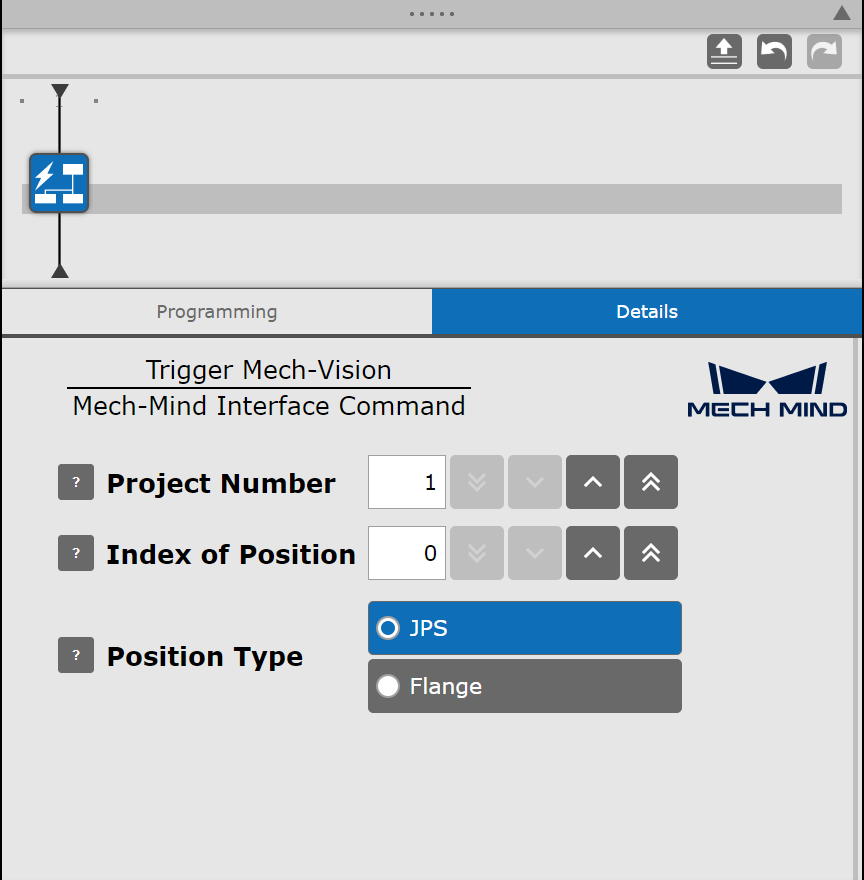
Mech-Vision 트리거하기
이 명령어는 Mech-Vision 프로젝트 실행을 트리거하는 데 사용됩니다.
파라미터 설명
| 파라미터 | 설명 | ||
|---|---|---|---|
프로젝트 번호 |
Mech-Vision 프로젝트 번호(프로젝트 이름 앞의 숫자)는 Mech-Vision 프로젝트 리스트 창에서 확인할 수 있습니다. |
||
포즈 번호 |
Mech-Vision가 출력할 기대하는 비전 포인트 수입니다. 0으로 설정하면 감지된 모든 비전 포인트를 출력하되 최대 20개를 초과하지 않습니다. 1에서 20 사이의 정수로 설정하면 감지된 비전 포인트의 총 개수가 설정된 기대값보다 많을 경우, Mech-Vision는 고정된 개수의 비전 포인트를 반환하도록 시도합니다.
|
||
포즈 유형 |
JPS: 로봇의 현재 관절 각도 값을 Mech-Vision에 전송합니다.
|
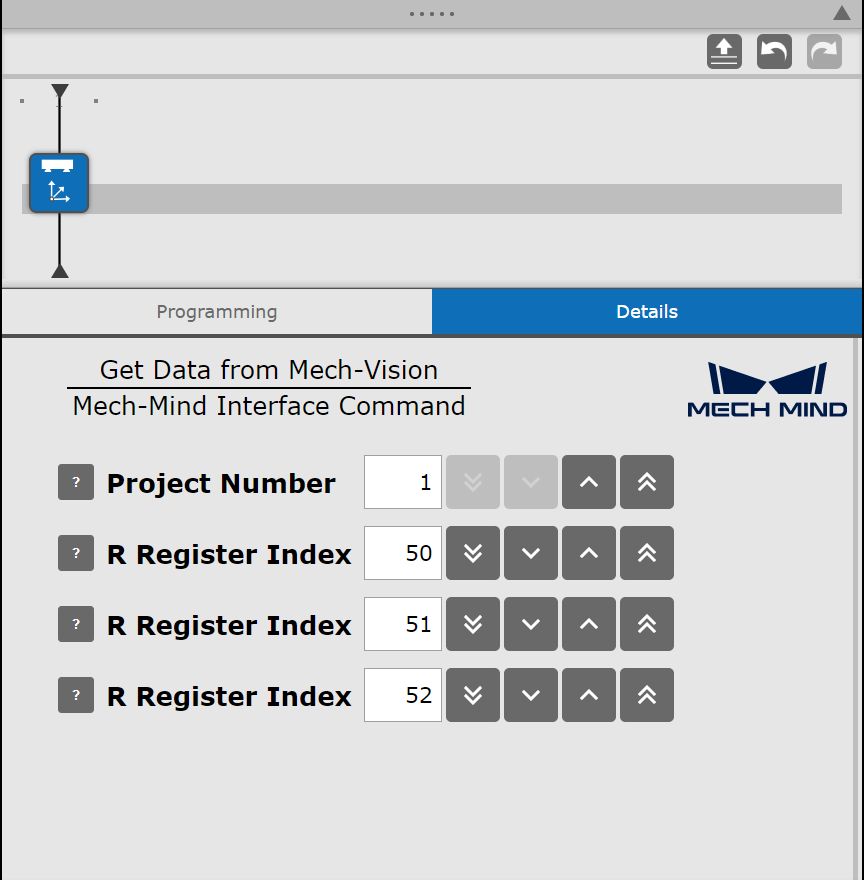
Mech-Vision 데이터 획득
이 명령어는 Mech-Vision 프로젝트의 결과를 수신하는 데 사용됩니다. Mech-Vision 트리거하기 후에 연결해야 합니다.
파라미터 설명
| 파라미터 | 설명 |
|---|---|
프로젝트 번호 |
Mech-Vision 프로젝트 번호(프로젝트 이름 앞의 숫자)는 Mech-Vision 프로젝트 리스트 창에서 확인할 수 있습니다. |
R 레지스터 1 |
1: Mech-Vision 데이터가 전송 완료됩니다.
|
R 레지스터 2 |
수신된 비전 포인트 수 |
R 레지스터 3 |
수신된 상태 코드 |
Mech-Vision 비전 레시피 전환
이 명령어는 Mech-Vision 프로젝트의 파라미터 레시피를 전환하는 데 사용됩니다. Mech-Vision에서 파라미터 레시피를 사전 구성하고 저장해야 합니다. Mech-Vision 트리거하기 전에 연결합니다.
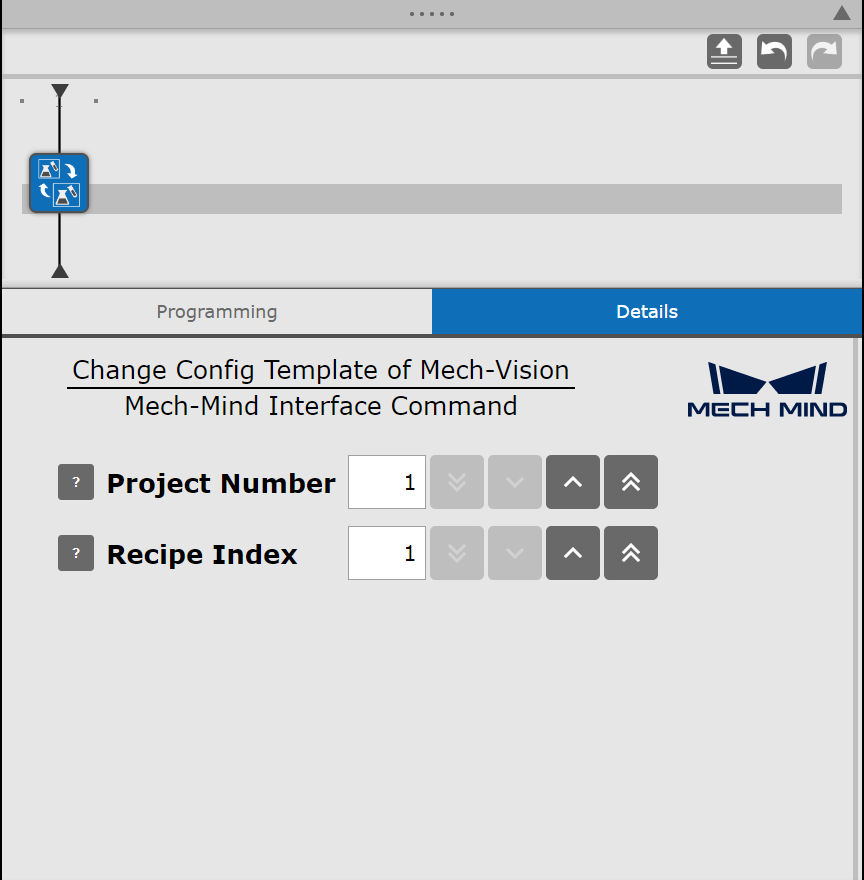
파라미터 설명
| 파라미터 | 설명 |
|---|---|
프로젝트 번호 |
Mech-Vision 프로젝트 번호(프로젝트 이름 앞의 숫자)는 Mech-Vision 프로젝트 리스트 창에서 확인할 수 있습니다. |
레시피 번호 |
Mech-Vision 프로젝트의 레시피 번호 |
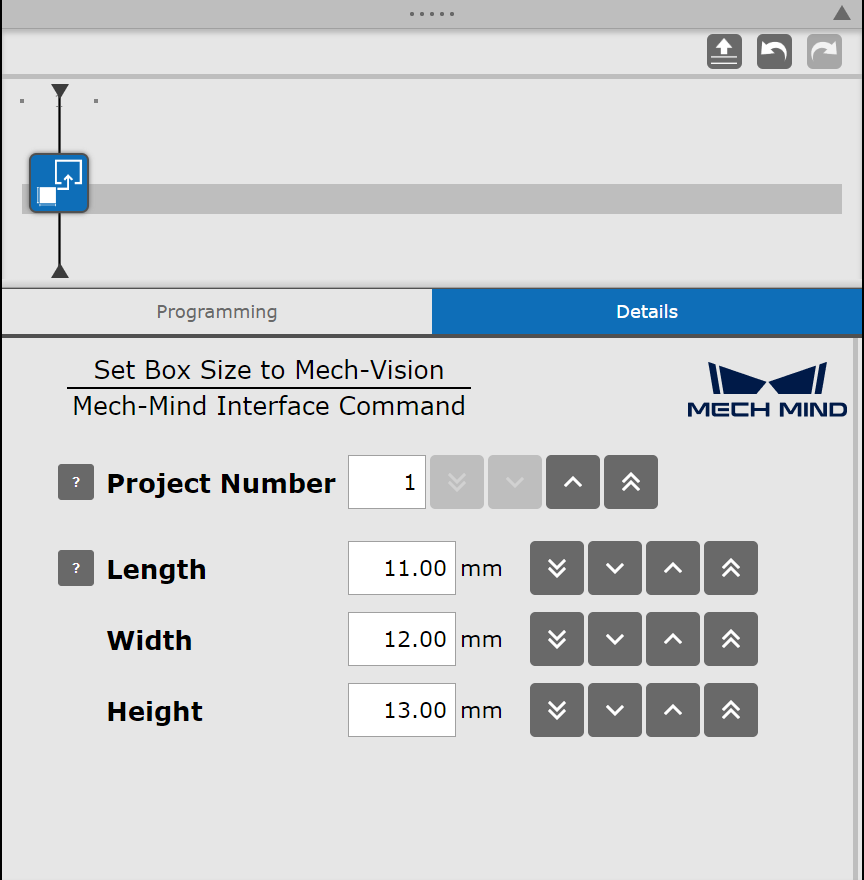
Mech-Vision 외부에서 치수를 입력하기
이 명령어는 Mech-Vision 프로젝트의 “물체 치수 읽기” 스텝에 물체의 치수를 입력하는 데 사용됩니다.
파라미터 설명
| 파라미터 | 설명 |
|---|---|
프로젝트 번호 |
Mech-Vision 프로젝트 번호(프로젝트 이름 앞의 숫자)는 Mech-Vision 프로젝트 리스트 창에서 확인할 수 있습니다. |
상자의 길이 |
물체 치수의 길이를 설정합니다. |
상자의 너비 |
물체 치수의 너비를 설정합니다. |
상자의 높이 |
물체 치수의 높이를 설정합니다. |
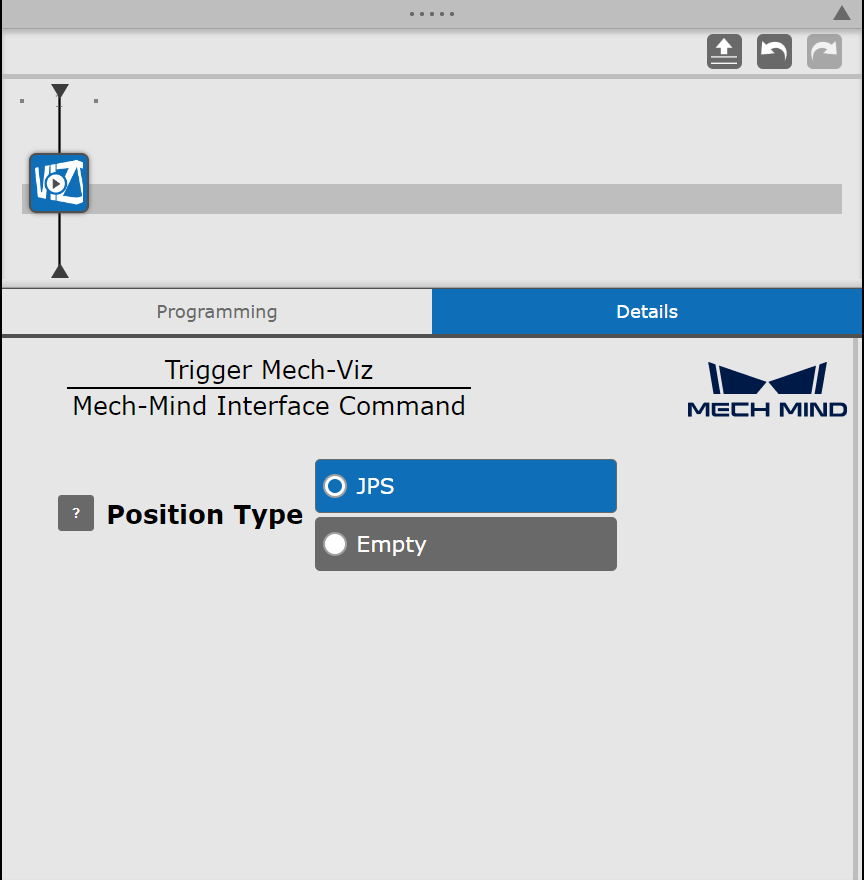
Mech-Viz 트리거하기
이 명령어는 Mech-Viz 프로젝트 실행을 트리거하는 데 사용됩니다.
파라미터 설명
| 파라미터 | 설명 |
|---|---|
포즈 유형 |
JPS: 현재 로봇의 관절 각도를 Mech-Viz에 송신하여 로봇 이동을 동기화하고 시작 위치를 계획합니다.
|
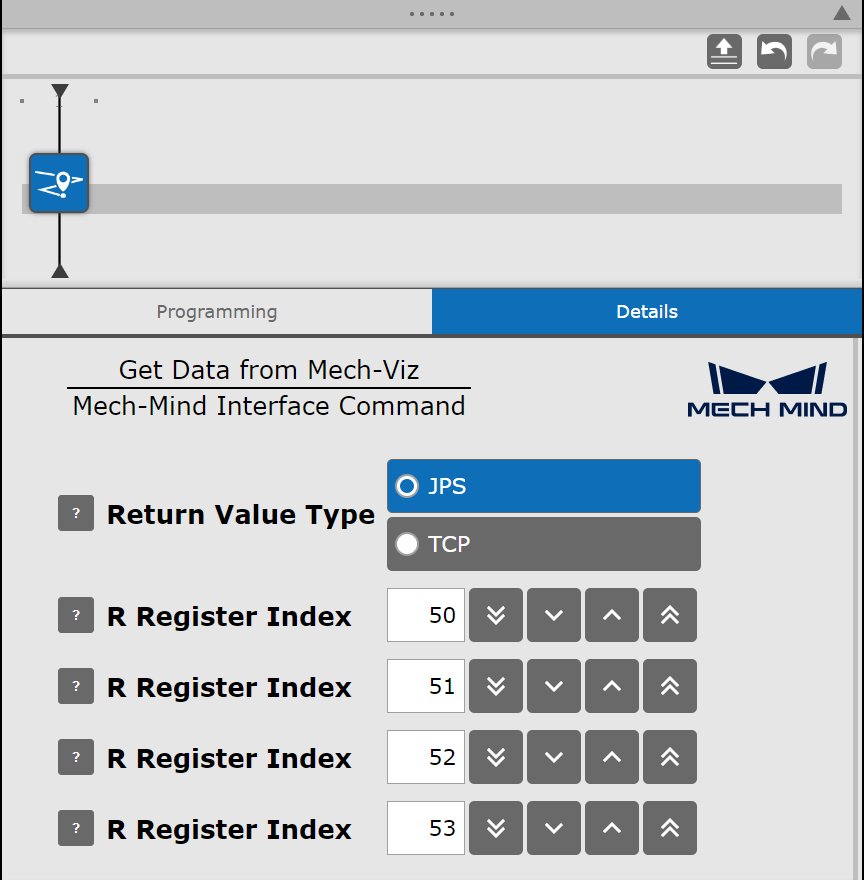
Mech-Viz 데이터 획득
이 명령어는 Mech-Viz 프로젝트의 결과를 수신하는 데 사용됩니다. Mech-Viz 트리거하기 후에 연결해야 합니다.
파라미터 설명
| 파라미터 | 설명 | ||
|---|---|---|---|
반환값 유형 |
1: 웨이 포인트의 관절 각도 값
|
||
R 레지스터 1 |
1: Mech-Viz 데이터가 전송 완료됩니다.
|
||
R 레지스터 2 |
수신된 웨이 포인트 수
|
||
R 레지스터 3 |
경로에서의 픽 포인트 위치 번호 |
||
R 레지스터 4 |
수신된 상태 코드 |
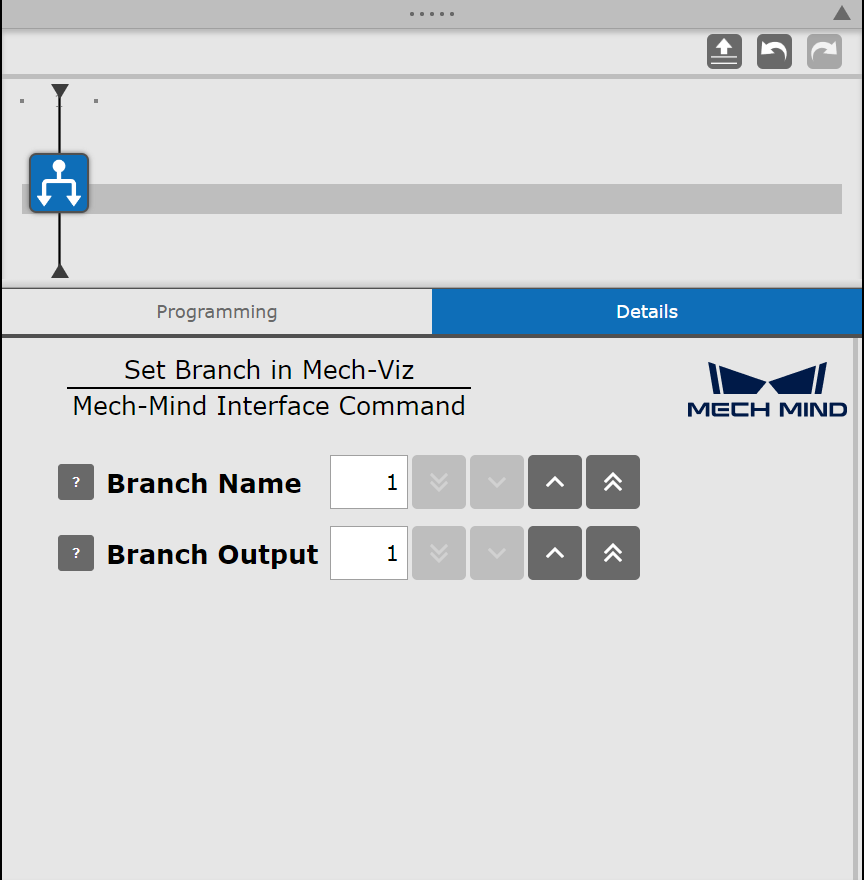
Mech-Viz 분기 설정하기
이 명령어는 Mech-Viz 프로젝트의 "메시지 분기" 스텝의 아웃 포트 번호를 설정하는 데 사용됩니다.
파라미터 설명
| 파라미터 | 설명 |
|---|---|
분기 명칭 |
"메시지 분기" 스텝 번호에 해당하는 값입니다. |
분기 아웃 포트 |
분기의 아웃 포트 번호를 지정하면 Mech-Viz 프로그램은 이 포트를 통해 계속 실행됩니다. 파라미터 범위는 [1~99]입니다. |
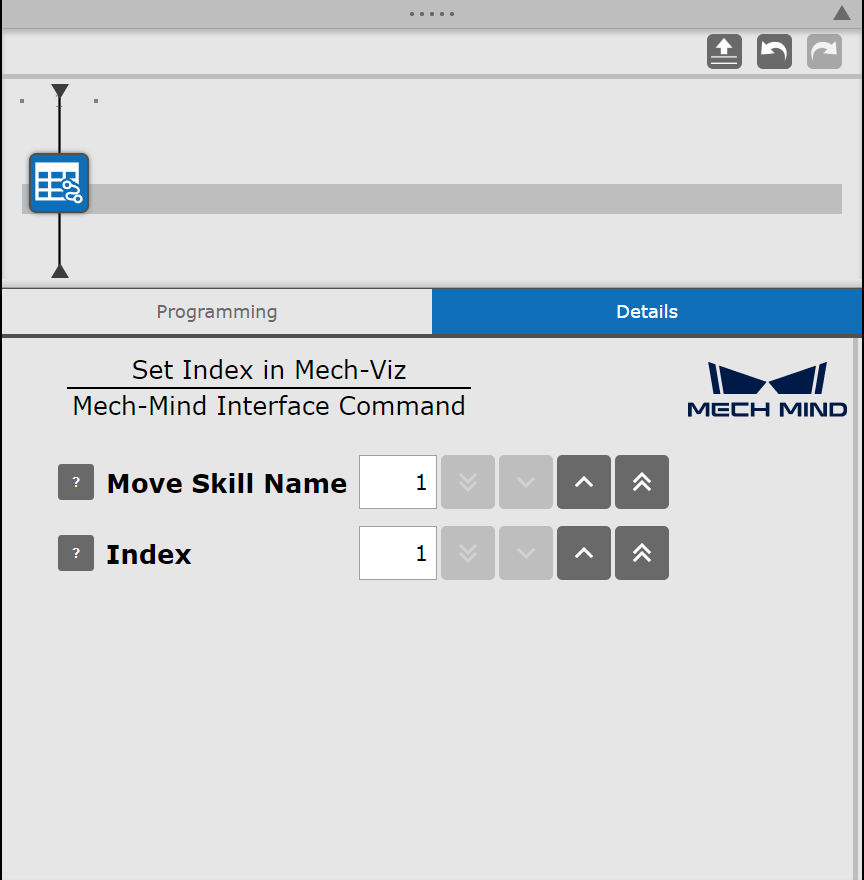
Mech-Viz 인덱스 설정하기
인덱스를 포함하는 이동 유형 스텝(예: 순서대로 이동, 배열대로 이동, 사용자 정의 파렛트 패턴, 미리 설정된 파렛트 패턴 등)의 경우, 해당 명령어를 호출하면 속성의 현재 인덱스 값을 설정할 수 있습니다.
파라미터 설명
| 파라미터 | 설명 |
|---|---|
이동 스텝 번호 |
이 스텝 번호에 해당하는 값입니다. |
인덱스 값 |
인덱스 값을 설정합니다. 해당 값은 Mech-Viz에서 표시된 현재 인덱스 값에 1을 더한 값으로 설정됩니다. |
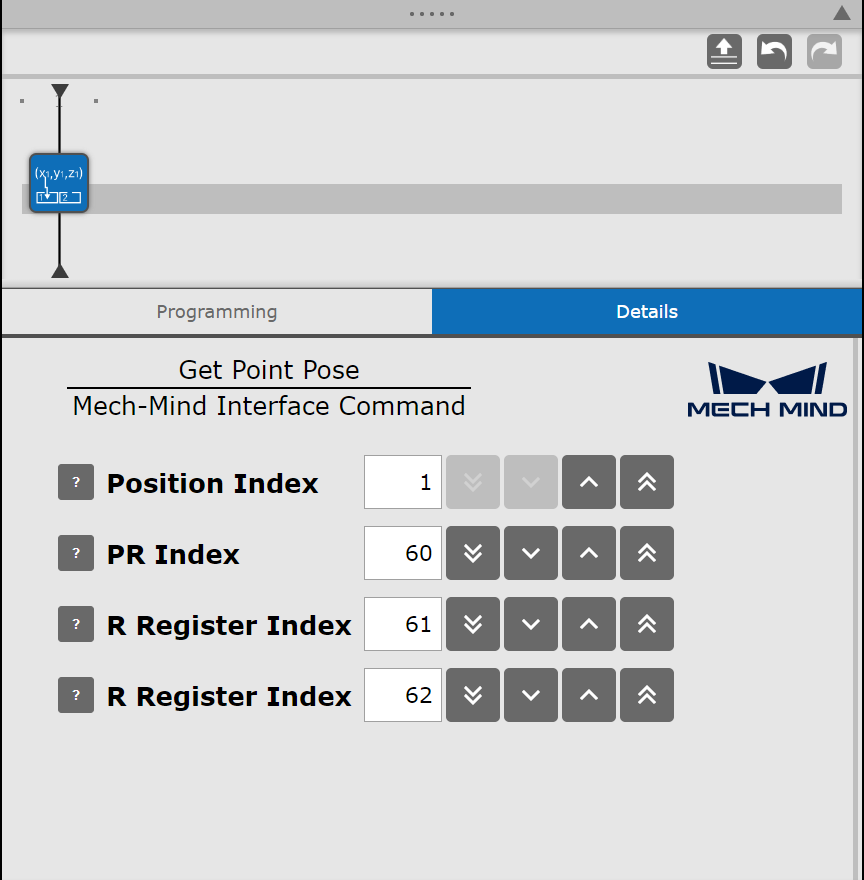
Mech-System 포즈 획득하기
이 명령어는 Mech-Vision가 반환한 비전 결과에서 특정 비전 포인트 또는 Mech-Viz가 반환한 이동 경로에서 특정 웨이 포인트를 지정된 포즈 변수에 저장하는 데 사용됩니다. 여러 개의 비전 포인트 또는 웨이 포인트를 얻으려면 해당 명령어를 여러 번 사용하고 R 레지스터를 수정하면 됩니다.
파라미터 설명
| 파라미터 | 설명 |
|---|---|
R 레지스터 |
사용자가 지정한 R 레지스터의 양의 정수값을 "위치 번호"로 사용하며, 해당 번호에 따라 몇 번째 비전 취득 포인트로 전송할지를 결정합니다 |
PR 레지스터 |
사용자가 지정한 픽 포인트 좌표 값은 이 지정된 PR 레지스터에 저장됩니다. |
R 레지스터 1 |
사용자가 지정한 픽 포인트 레이블을 이 지정된 R 레지스터 1에 저장합니다. |
R 레지스터 2 |
사용자가 지정한 픽 포인트 이동 속도 값은 이 지정된 R 레지스터 2에 저장됩니다. 이 값은 항상 0입니다. |
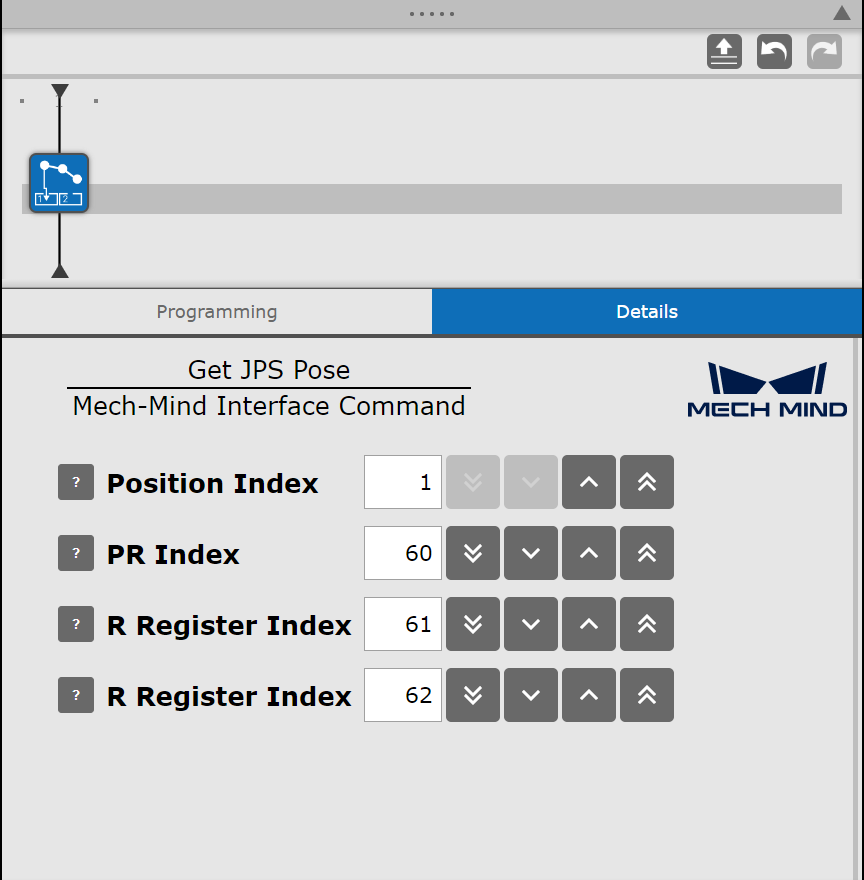
Mech-System 관절 각도 획득하기
이 명령어는 Mech-Viz 소프트웨어에서 반환된 이동 경로 중 특정 웨이 포인트의 관절 각도 데이터를 지정한 포즈 변수에 전송하는 데 사용됩니다. 여러 개의 웨이 포인트의 관절 각도 데이터를 얻으려면 해당 명령어를 여러 번 사용하고 포즈 번호를 수정하면 됩니다.
파라미터 설명
| 파라미터 | 설명 |
|---|---|
R 레지스터 |
사용자가 지정한 R 레지스터의 양의 정수값을 "위치 번호"로 사용하며, 해당 번호에 따라 몇 번째 비전 취득 포인트로 전송할지를 결정합니다 |
PR 레지스터 |
사용자가 지정한 웨이 포인트 관절 각도 값은 이 지정된 PR 레지스터에 저장됩니다. |
R 레지스터 1 |
사용자가 지정한 웨이 포인트 레이블을 이 지정된 R 레지스터 1에 저장합니다. |
R 레지스터 2 |
사용자가 지정한 웨이 포인트 이동 속도 값은 이 지정된 R 레지스터 2에 저장됩니다. |