로봇 통신 구성에서 IP 주소와 포트를 설정하는 방법
많은 사용자들이 로봇 통신 설정에서 IP 주소와 포트에 대해 잘 알지 못하고, 어떤 장치의 IP 주소를 입력해야 할지, 그리고 어떤 포트를 사용해야 할지 모르는 경우가 많습니다. 아래 그림을 참조하여 어떤 IP 주소와 포트를 사용해야 하는지 확인할 수 있습니다. 이 문서에서는 해당 IP 주소와 포트의 의미를 설명드립니다. 구체적인 내용은 아래 표와 같습니다.
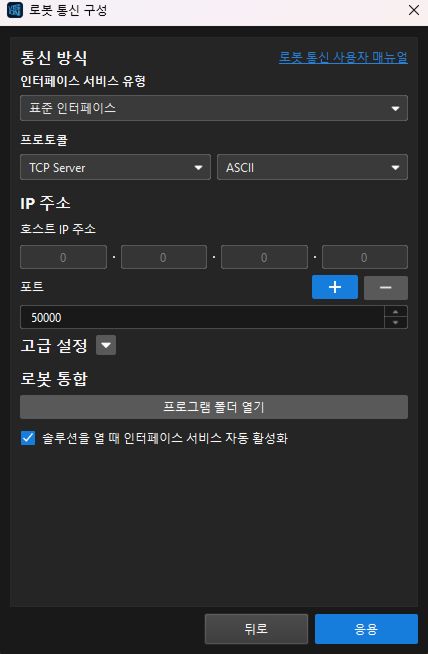
| 프로토콜 | 비전 시스템 역할 | IP 주소 | 포트 |
|---|---|---|---|
TCP Server |
서버 |
0.0.0.0 |
외부 장치(로봇이나 PLC)가 연결하는 데 사용되는 사용자 정의 숫자입니다. 외부 장치의 표준 인터페이스 프로그램에는 비전 시스템이 설치된 IPC의 IP 주소와 설정된 포트 번호를 입력해야 합니다. |
Siemens PLC Client |
클라이언트 |
PLC의 IP 주소 |
없음 |
ETHERNET IP |
서버 |
없음 |
없음 |
MODBUS TCP Slave |
서버 |
0.0.0.0 |
외부 장치(로봇이나 PLC)가 연결하는 데 사용되는 사용자 정의 숫자입니다. 외부 장치의 표준 인터페이스 프로그램에는 비전 시스템이 설치된 IPC의 IP 주소와 설정된 포트 번호를 입력해야 합니다. |
UDP Server |
서버와 클라이언트 구분 없음 |
0.0.0.0 |
외부 장치(로봇이나 PLC)가 연결하는 데 사용되는 사용자 정의 숫자입니다. 외부 장치의 표준 인터페이스 프로그램에는 비전 시스템이 설치된 IPC의 IP 주소와 설정된 포트 번호를 입력해야 합니다. |
Mitsubishi MC Client |
클라이언트 |
PLC의 IP 주소 |
PLC의 포트 번호 |