ELITE 자동 캘리브레이션
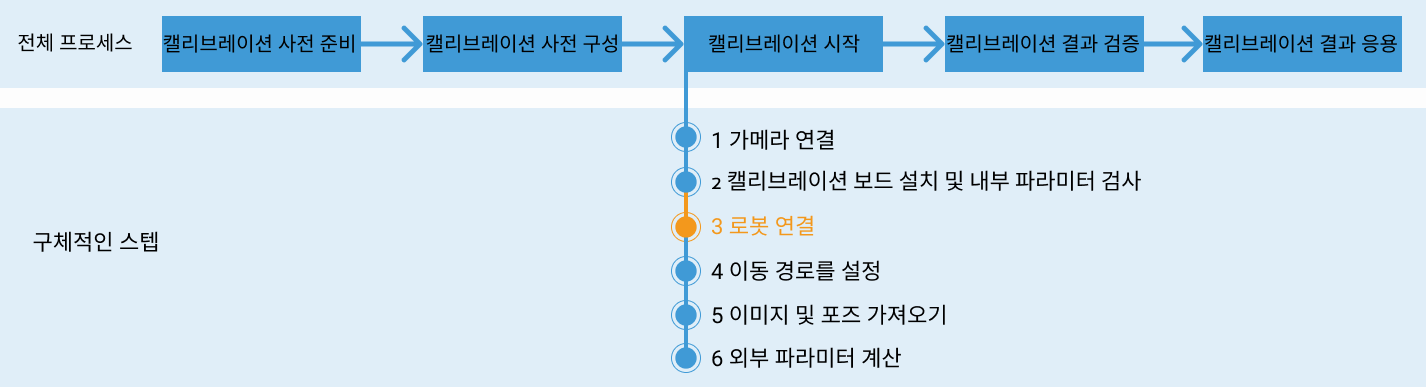
표준 인터페이스 통신을 설정한 후, 로봇을 연결하여 자동 캘리브레이션을 수행할 수 있습니다. 자동 캘리브레이션의 전체적인 프로세스는 아래 그림과 같습니다.
특별 참고 사항
캘리브레이션을 실행할 때 Mech-Vision 소프트웨어 화면의 "로봇을 연결하기" 스텝에서 로봇이 연결되기를 기다리는 중... 버튼이 나타나면 사용자는 아래 스텝에 따라 로봇 측에서 작업을 수행해야 하며, 작업 완료 후 Mech-Vision 소프트웨어에서 나머지 단계를 진행하십시오.
|
|
이 부분 내용을 시작하기 전에 다음을 확인하십시오.
|
1. 변수 열기
캘리브레이션 포인트에 툴의 센터 포인트 포즈는 (TCP) V099 변수에서 저장되며, 해당 관절 각도 데이터는 P099 변수에 저장됩니다. 캘리브레이션 시작하기 전에 아래 단계에 따라 V099 변수와 P099 변수를 열립니다.
-
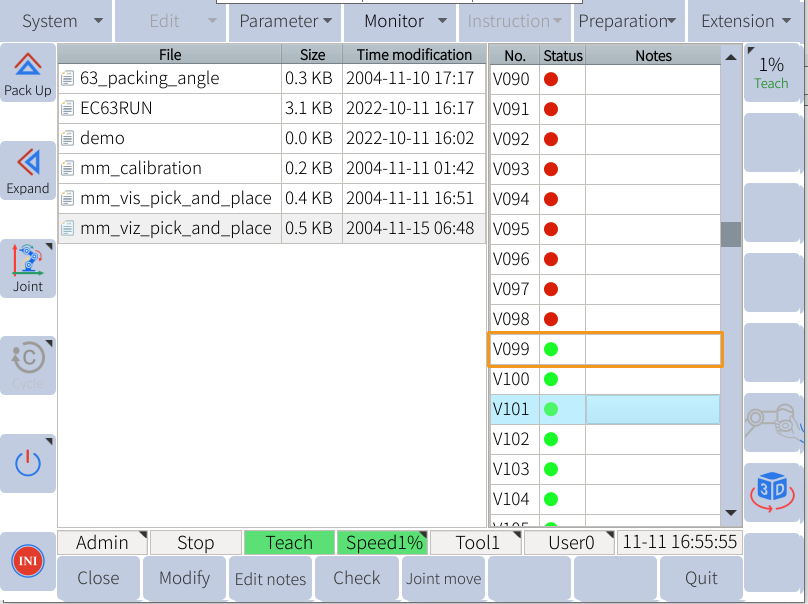
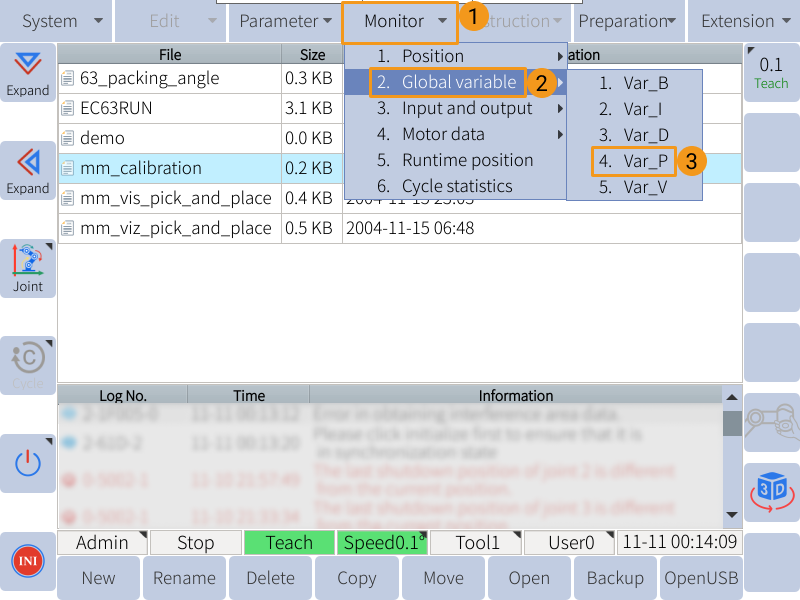
차례로 티치 펜던트에서 를 클릭하여 V099 변수 켜있는지 확인합니다. 메시지 표시줄 아이콘이 녹색으로 표시되면 켜짐을 나타내고 빨간색은 켜지지 않았음을 나타냅니다.
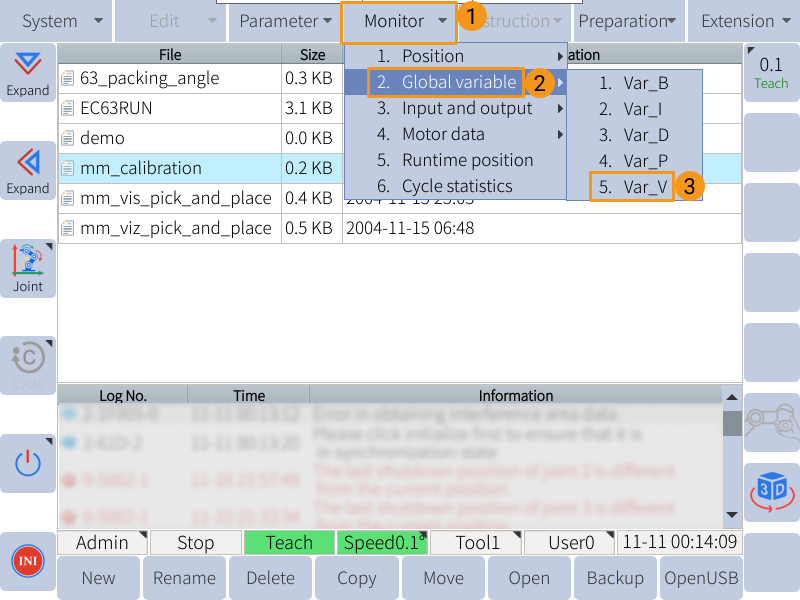
변수가 열리지 않으면 변수를 선택하고 화면 왼쪽 하단의 Open 버튼을 클릭합니다.
-
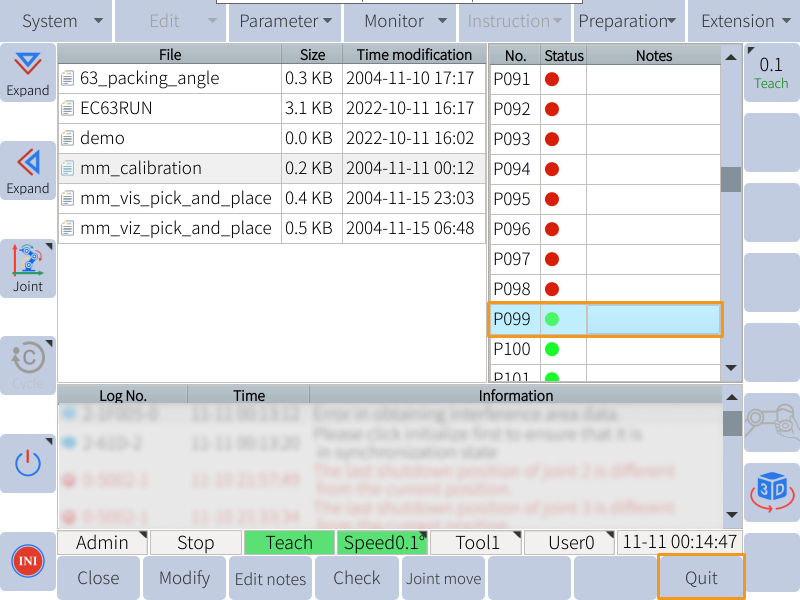
마찬가지로, 차례로 티치 펜던트에서 를 클릭하고 P099변수를 연 다음 Quit를 클릭하여 홈 페이지로 돌아갑니다.
2. 티치 펜던트를 통해 캘리브레이션 시작점 설정
-
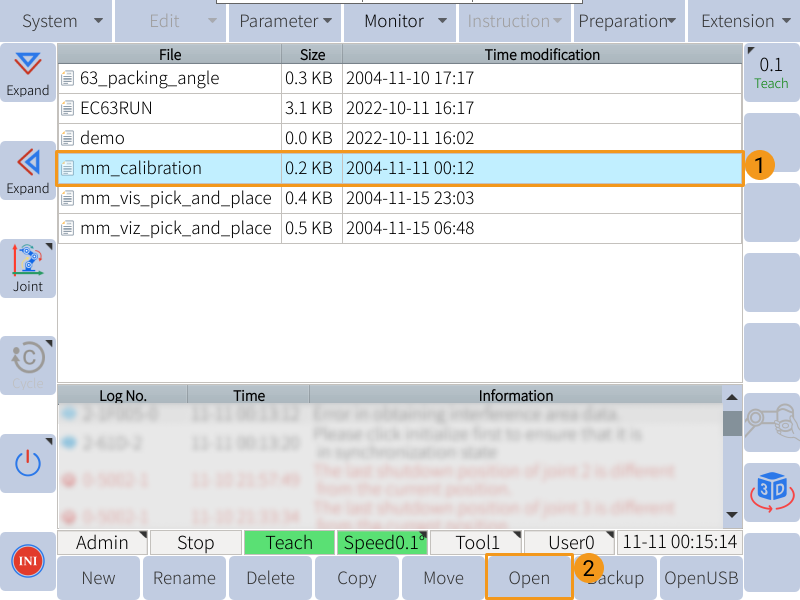
mm_calibration 을 선택한 후 Open버튼을 클릭하십시오.
-
수동으로 로봇을 캘리브레이션의 시작점으로 이동합니다.
시작점 위치는 캘리브레이션 보드의 포인트 클라우드 품질을 확인할 때 로봇이 있는 위치로 설정할 수 있습니다.
-
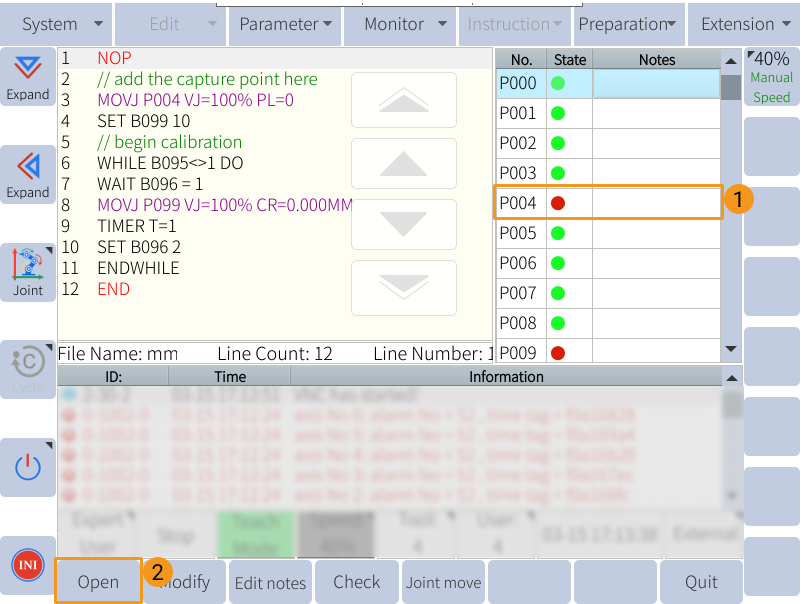
차례로 티치 펜던트에서 를 클릭하여, 티치 펜던트로 저장하고 싶은 변수를 선택합니다.(이 예에서 캘리브레이션 시작점은 P004 변수에 저장됩니다).
-
변수가 닫힌 상태이면 Open를 클릭하여 티치 펜던트 포인트에 저장합니다.
-
변수가 연 상태이면 먼저Off를 클릭한 다음 다시 Open 클릭하고 티치 펜던트 포인트에 저장합니다.
-
-
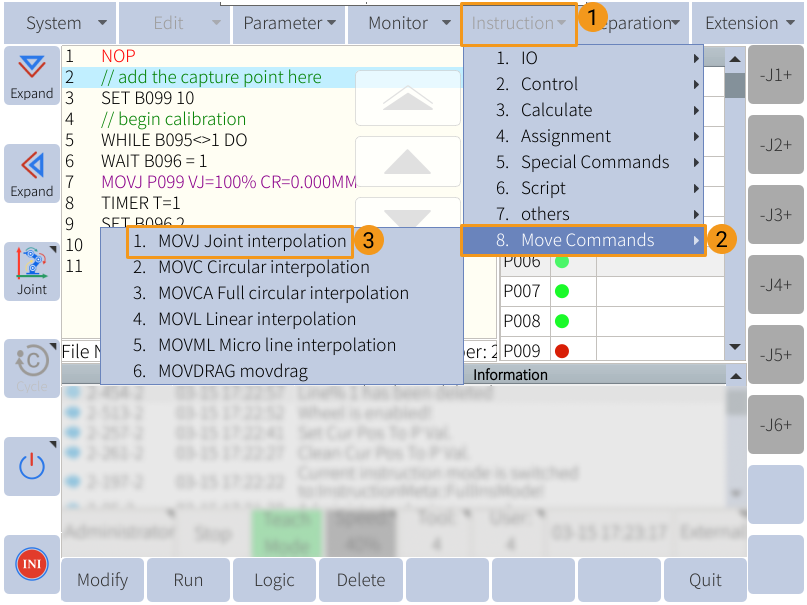
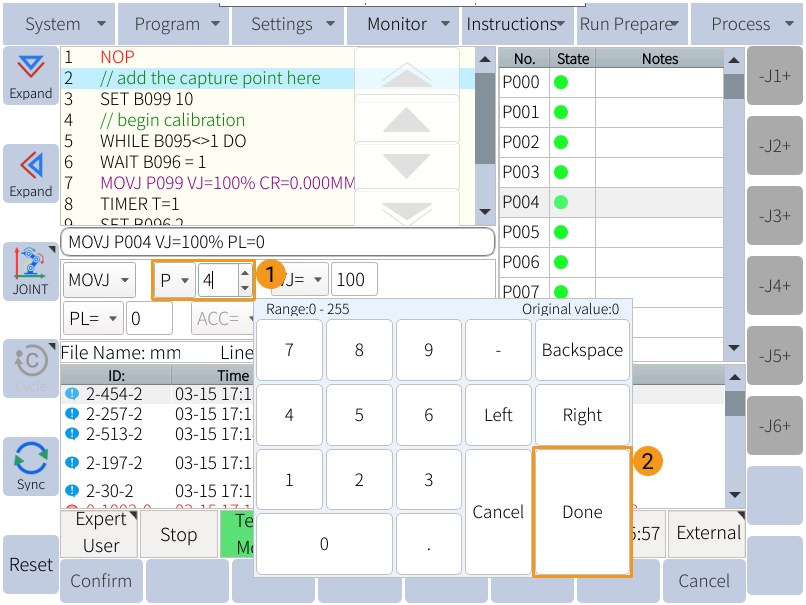
프로그램 2번째 줄 선택하고 차례로 을 클릭합니다.
-
캘리브레이션 시작점이 있는 P 변수를 선택하고 Done를 클릭합니다. 티치 펜던트 뒤면의 있는 노란색 서브 안전 버튼을 누르고 Confirm을 클릭하여 이동 명령어를 삽입합니다.

-
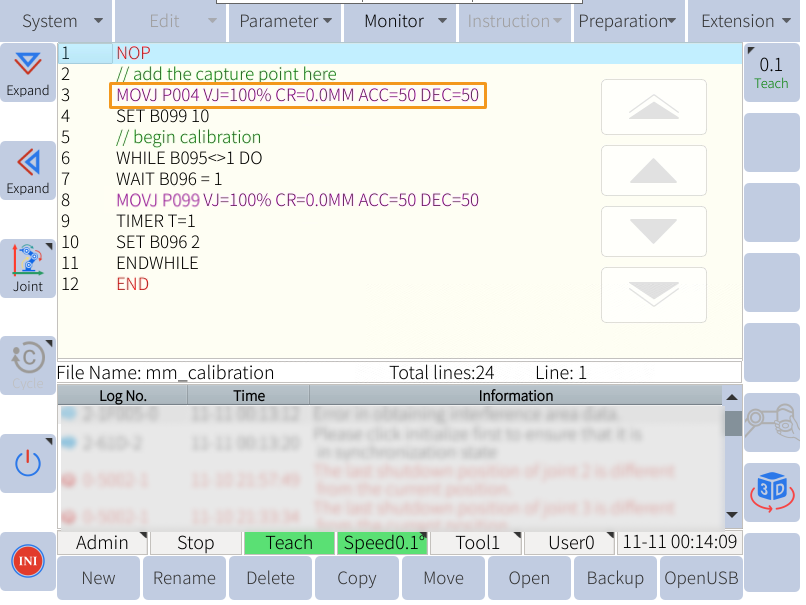
명령어 MOVJ 성공적으로 추가되면 아래 그림 프로그램의 3번째 줄에 표시된 명령어를 볼 수 있습니다.
|
이동 유형은 실제 상황 따라 MOVJ 또는 MOVL을 선택할 수 있습니다. 관절 보간*MOVJ* 선택할 때 캘리브레이션 포인트는 해당 P 변수 를 사용하여 관절 각도(JPs) 형태로 저장하여; 직선 보간 MOVL 선택할 때 캘리브레이션 포인트는 해당 V 변수 를 사용하여 툴의 센터 포인트(TCP) 형태로 저장합니다. |
3. 캘리브레이션 프로그램 실행
-
커서를 프로그램의 첫 번째 줄로 이동하고 티치 펜던트의 키를 PLAY 모드로 돌립니다.
-
티치 펜던트 오른쪽 하단의 노란색 버튼을 클릭하여 서브를 활성화한 후 녹색 버튼을 눌러 프로그램을 자동으로 실행합니다.

-
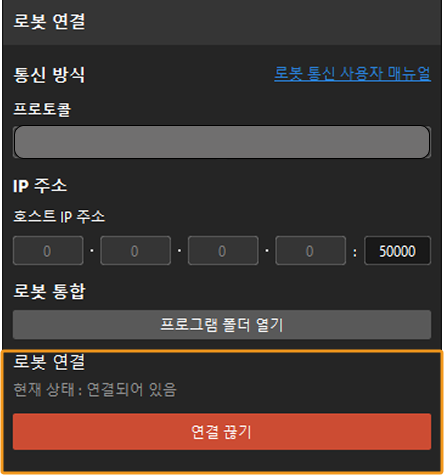
Mech-Vision의 캘리브레이션 창을 확인하고 로봇 연결 영역에 "연결됨" 상태 정보가 표시된 후, 버튼이 로봇이 연결되기를 기다리는 중...에서 연결 끊기로 변경되면 하단 바에서 다음 버튼을 클릭합니다.
-
아래 링크를 각각 참고하여 캘리브레이션 시작 중 네 번째 스텝(이동 경로 설정)과 후속 워크플로를 실행하십시오.