Kawasaki 로봇의 경우 표준 인터페이스 프로그램이 백그라운드에서 실행하는 방법
Kawasaki 로봇의 경우 메인 프로그램이 서브 프로그램을 호출할 때 메인 프로그램은 포그라운드 프로그램에 속하고 서브 프로그램은 백그라운드 프로그램에 속하며 로봇 시스템이 부팅된 후 자동으로 실행되어야 합니다. 다음에서는 Kawasaki 로봇에서 표준 인터페이스 백그라운드 프로그램을 생성하고 백그라운드 실행을 구현하는 방법을 설명합니다.
| 시작하기 전에 Kawasaki 표준 인터페이스 통신 구성을 완료했는지 확인하십시오. |
-
컴퓨터에서 새 텍스트 문서를 만들고, 파일 이름을 loadme로 변경하고, 파일 확장명을 as로 변경한 다음 메모장으로 엽니다.
-
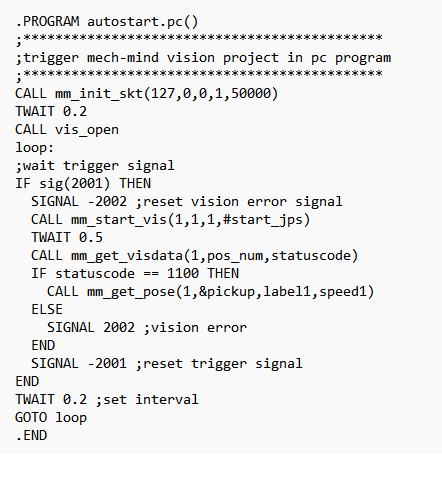
loadme.as 파일에서 다음과 같이 autostart.pc 서브 프로그램(백그라운드 프로그램)을 입력합니다. 이 프로그램은 내부 신호 2001이 감지되면 프로그램이 Mech-Vision 프로젝트를 실행하여 비전 결과를 얻도록 트리거한다는 것을 나타냅니다.
-
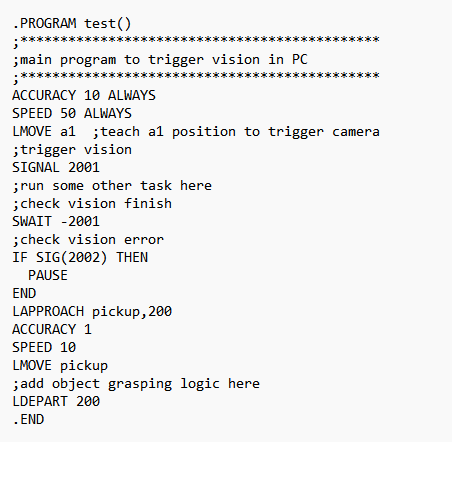
loadme.as 파일에서 다음과 같이 test 메인 프로그램(포그라운드 프로그램)을 추가합니다. 이 프로그램은 카메라 이미지 캡처 위치에서 2001 신호를 트리거함을 의미합니다. 성공적으로 비전 결과를 획득하면 로봇을 비전 포인트로 이동하여 피킹을 실행합니다.
-
loadme.as 파일을 로봇에 로드합니다. 자세한 내용은 Kawasaki 표준 인터페이스 통신 설정을 참조하십시오.
-
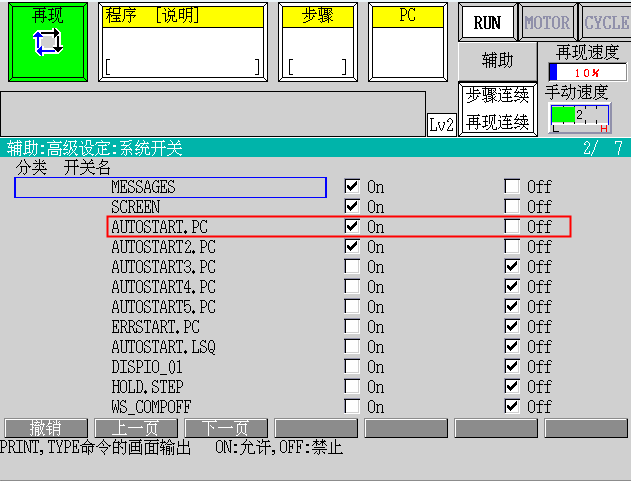
순서대로 를 클릭합니다. AUTOSTART.PC를 ON으로 설정하면 해당 프로그램이 부팅 시 자동으로 실행되도록 설정됩니다. 이후 login을 눌러 설정을 확인합니다.
-
프로그램 선택 창에서 포그라운드 프로그램 test를 선택합니다.
-
백그라운드 프로그램을 실행하려면 컨트롤러를 다시 시작하십시오.
-
포그라운드 프로그램 test를 실행합니다. 구체적인 실행 방법은 캘리브레이션 프로그램 실행을 참조하십시오.