YASKAWA 자동 캘리브레이션
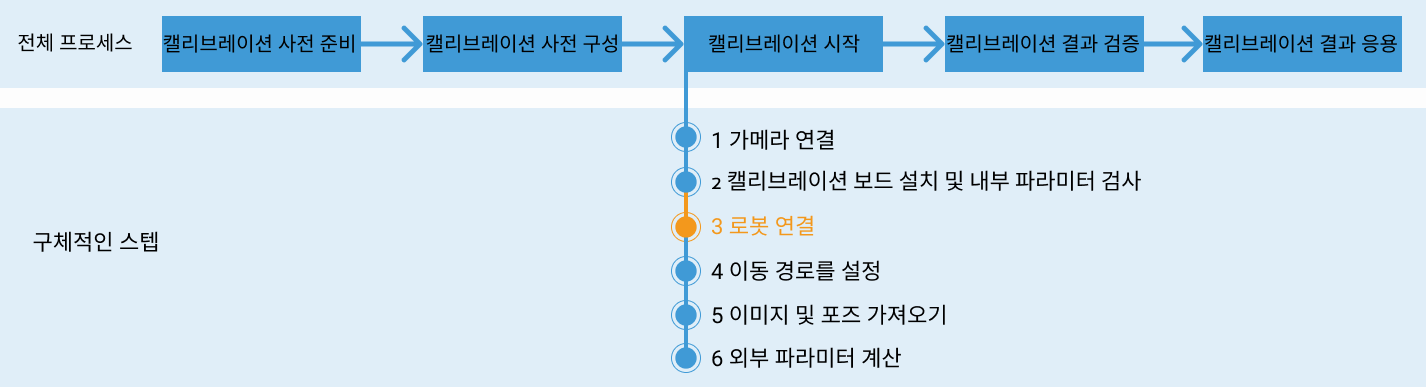
표준 인터페이스 통신을 설정한 후, 로봇을 연결하여 자동 캘리브레이션을 수행할 수 있습니다. 자동 캘리브레이션의 전체적인 프로세스는 아래 그림과 같습니다.
특별 참고 사항
캘리브레이션을 실행할 때 Mech-Vision 소프트웨어 화면의 "로봇을 연결하기" 스텝에서 로봇이 연결되기를 기다리는 중... 버튼이 나타나면 사용자는 아래 스텝에 따라 로봇 측에서 작업을 수행해야 하며, 작업 완료 후 Mech-Vision 소프트웨어에서 나머지 단계를 진행하십시오.
|
1. 캘리브레이션 프로그램 선택 및 수정
-
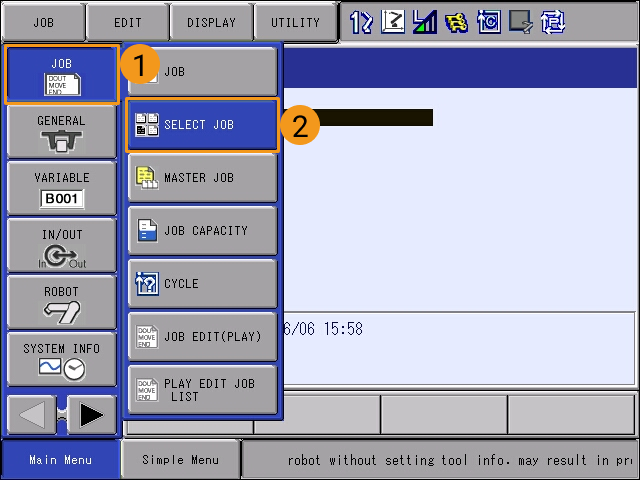
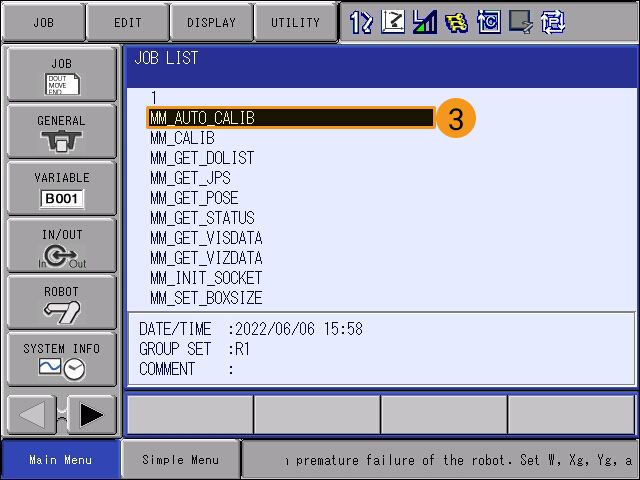
로봇이 티치 모드일 경우 티치 펜던트 스크린의 을 클릭하고, 캘리브레이션 프로그램 MM_AUTO_CALIB에 커서를 이동하십시오.
-
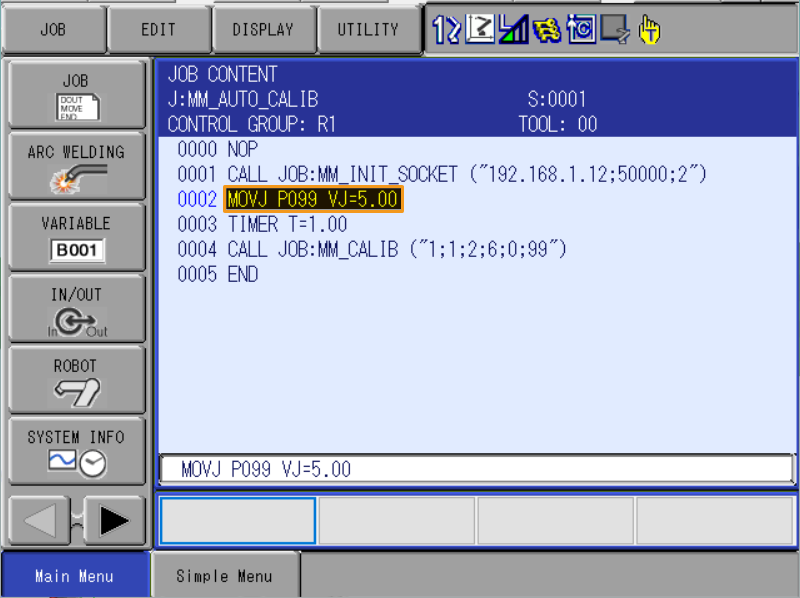
이 프로그램 파일을 선택하고 티치 펜던트의 SELECT 키를 누르면 다음과 같은 화면으로 들어갑니다.
-
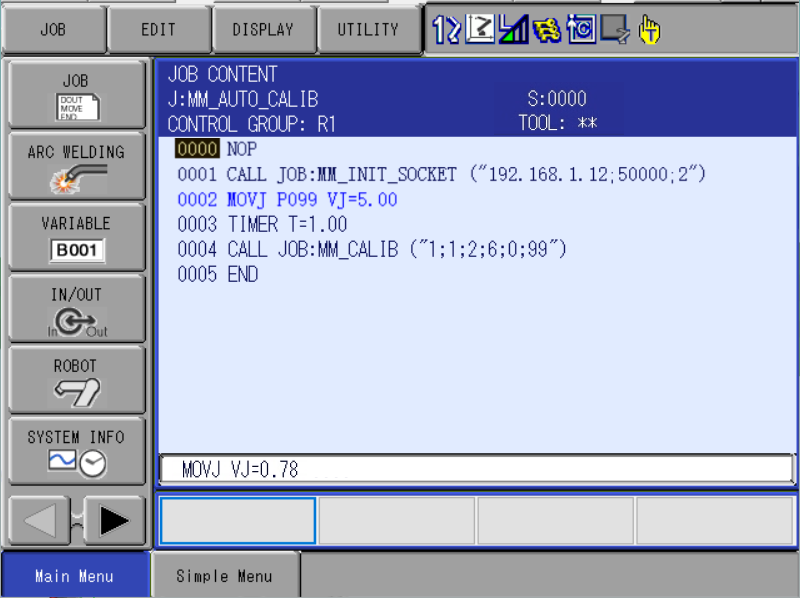
0001 줄의 내용을 선택하고 오른쪽 하단에 나타나는 내용에서 IP 주소와 포트 번호를 선택한 후, ENTER 키를 눌러 변경 인터페이스로 들어갑니다.
-
IP 주소를 IPC의 IP 주소로 수정합니다. 만약 Mech-Vision에서 설정한 호스트 포트 번호가 변경되었다면, 여기서의 포트 번호 50000도 Mech-Vision에서 설정된 호스트 포트 번호와 일치하도록 수정해야 합니다. 수정이 완료되면, 티치 펜던트의 오른쪽 하단의 ENTER 키를 두 번 누르면 프로그램 내용 화면으로 돌아갈 수 있습니다.
2. 티치 펜던트를 통해 캘리브레이션 시작점 설정
-
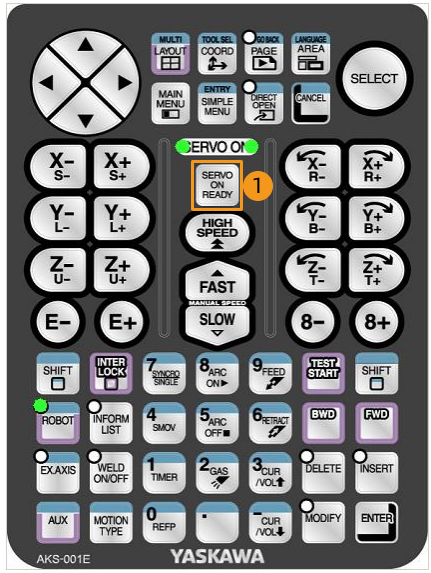
티치 펜던트의 SERVO ON READY 키를 누른 후, 티치 펜던트 뒷부분에 있는 서보 활성화 스위치를 잡고, 수동으로 로봇을 캘리브레이션의 시작점으로 이동합니다.
시작점 위치는 캘리브레이션 보드의 포인트 클라우드 품질을 확인할 때 로봇이 있는 위치로 설정할 수 있습니다.

-
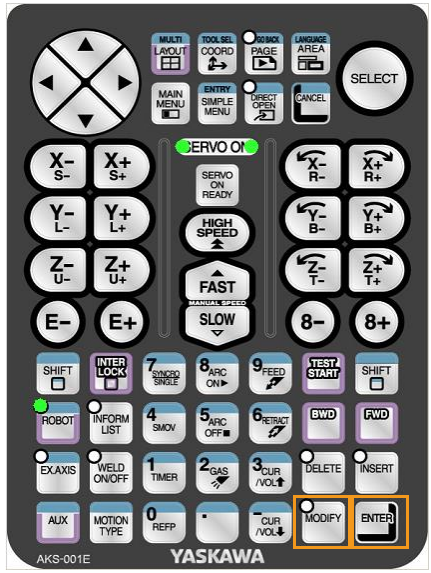
커서를 MOVJ P099 VJ=5로 이동하고, 티치 펜던트의 DIRECT OPEN 키를 누릅니다.
-
티치 펜던트에서 SERVO ON READY 버튼을 눌러 한 손으로는 티치 펜던트 뒤쪽의 서보 활성화 스위치 키를 눌러(다른 손의 작업이 완료될 때까지 계속 누르고 있어야 함) 다른 손으로는 MODIFY 키와 ENTER 키를 차례로 눌러 위치형 변수 P099를 현재 위치로 수정합니다. 그리고 P099 변수의 데이터 형식이 로봇이고 말단장치가 00임을 확인하십시오.
-
위치 변수 P099가 플랜지 포즈나 TCP를 저장하는 경우, 위치 변수 P099의 데이터 형식은 로봇으로 설정해야 합니다.
-
위치 변수 P099가 관절 각도(JPs)를 저장하는 경우, 위치 변수 P099의 데이터 형식은 관절이나 펄스로 설정해야 합니다.
-
00호 툴의 X, Y, Z, Rx, Ry, Rz 값은 미리 0으로 설정해야 합니다.

-
-
티치 펜던트 Direct open 키를 다시 누르고 프로그램 콘텐츠 인터페이스로 돌아갑니다.
3. 캘리브레이션 프로그램 실행
-
먼저 캘리브레이션 프로그램의 첫 번째 줄로 커서를 이동하고 티치 펜던트 키를 중간 기어로 돌리고 로봇을 재생 모드로 전환한 다음 티치 펜던트의 SERVO ON READY 키를 누릅니다.


저속 운전을 위해 속도를 조정하려면 아래 작업을 수행하십시오.
-
티치 펜던트의 화면에서 을 클릭하고, 캘리브레이션 프로그램 MM_AUTO_CALIB에 커서를 옮긴 후 티치 펜던트의 SELECT 키를 누릅니다.
-
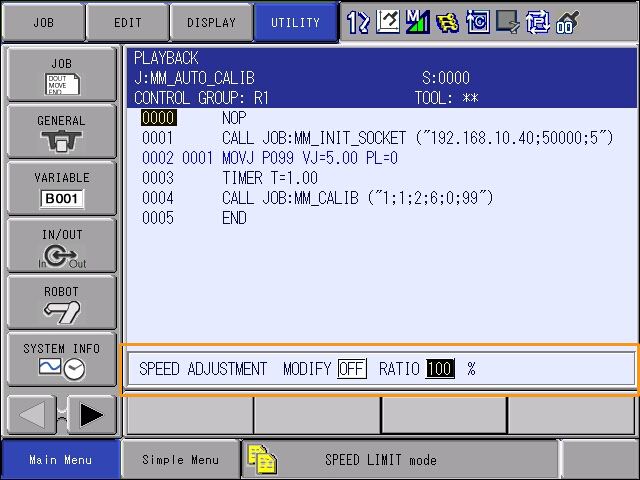
를 순서대로 선택하고, 아래에 있는SPEED ADJUSTMENT를 선택합니다.
SPEED ADJUSTMENT을 선택하지 않으면 속도 조절 표시줄에서 파라미터를 설정할 수 없습니다. 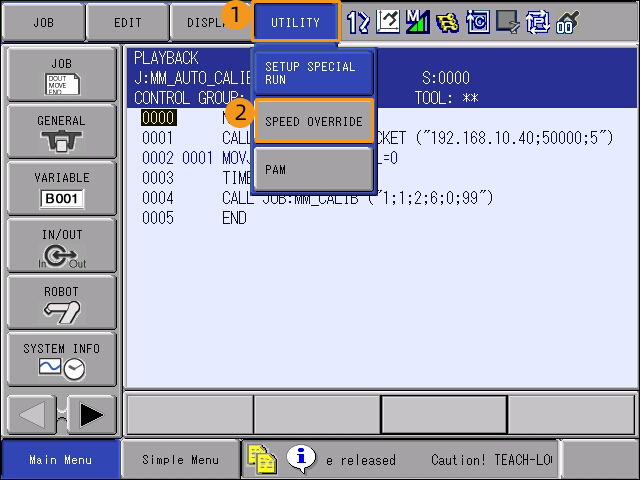
-
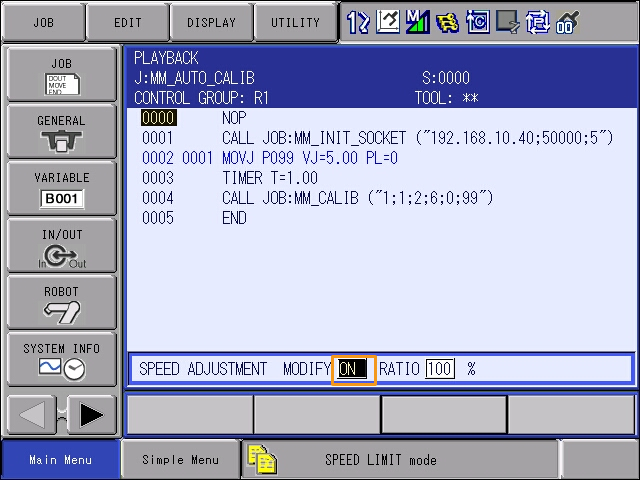
SPEED ADJUSTMENT에서 OFF를 선택한 뒤 티치 펜던트의 SELECT 키를 누르면 OFF가 ON으로 변경됩니다.
-
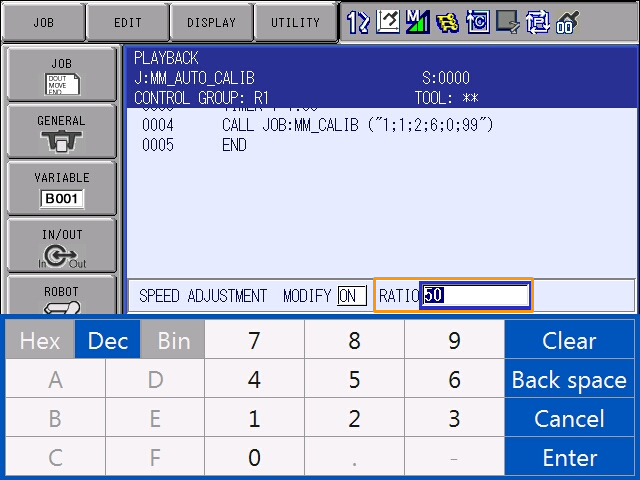
다음에는 비율을 조정하겠습니다. 비율 값을 선택하고 티치 펜던트의 SELECT 키를 눌러 속도 값 수정 인터페이스로 들어갑니다. 값을 입력한 후 티치 펜던트의 ENTER 키를 누르면 속도 수정이 완료됩니다.
-
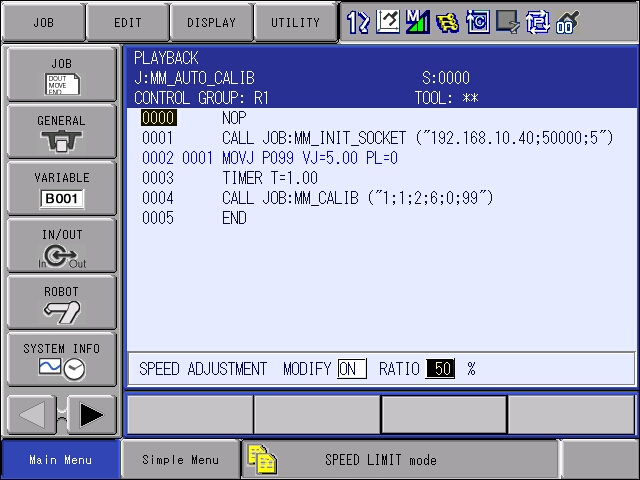
마지막으로 속도가 수정된 후의 화면은 아래 그림과 같습니다.
-
-
다음 티치 펜던트 위의 녹색 START 버튼을 누릅니다. 시작 버튼 표시등이 켜지면 로봇이 실행을 시작한다는 의미입니다.
작동 중 이상이 있는 경우에는 즉시 PAUSE 또는 EMERGENCY STOP 키를 누르십시오. 
-
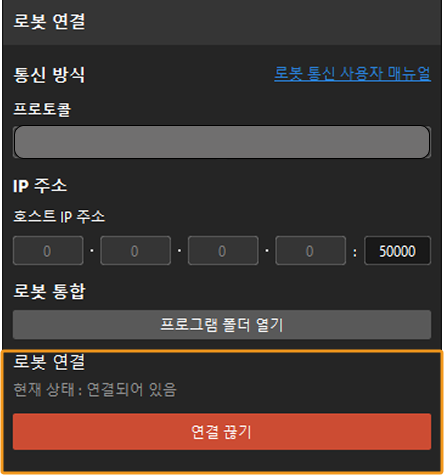
Mech-Vision의 캘리브레이션 창을 확인하고 로봇 연결 영역에 "연결됨" 상태 정보가 표시된 후, 버튼이 로봇이 연결되기를 기다리는 중...에서 연결 끊기로 변경되면 하단 바에서 다음 버튼을 클릭합니다.
-
아래 링크를 각각 참고하여 캘리브레이션 시작 중 네 번째 스텝(이동 경로 설정)과 후속 워크플로를 실행하십시오.