통신 구성 및 샘플 프로그램 사용
오므론 NX/NJ 시리즈 PLC와 Mech-Mind 비전 시스템 간 EtherNet/IP 통신 설정 방법은 다음과 같습니다.
|
하드웨어 및 소프트웨어 요구 사항
|
아래에 나열된 버전 및 모델은 테스트를 거쳐 사용할 수 있습니다. 다른 모델 및 버전은 본 문서를 참고하여 작업할 수 있으며, 문제가 발생하면 Mech-Mind 기술 지원팀에 문의하십시오. |
하드웨어
소프트웨어로 EtherNet/IP 통신을 구현하려면 이 행을 클릭하여 필요한 하드웨어 및 하드웨어 연결도를 확인하십시오.
-
PLC: 오므론 NX1P2-1040DT1.
-
IPC.
-
스위치(또는 라우터) 및 네트워크 케이블.
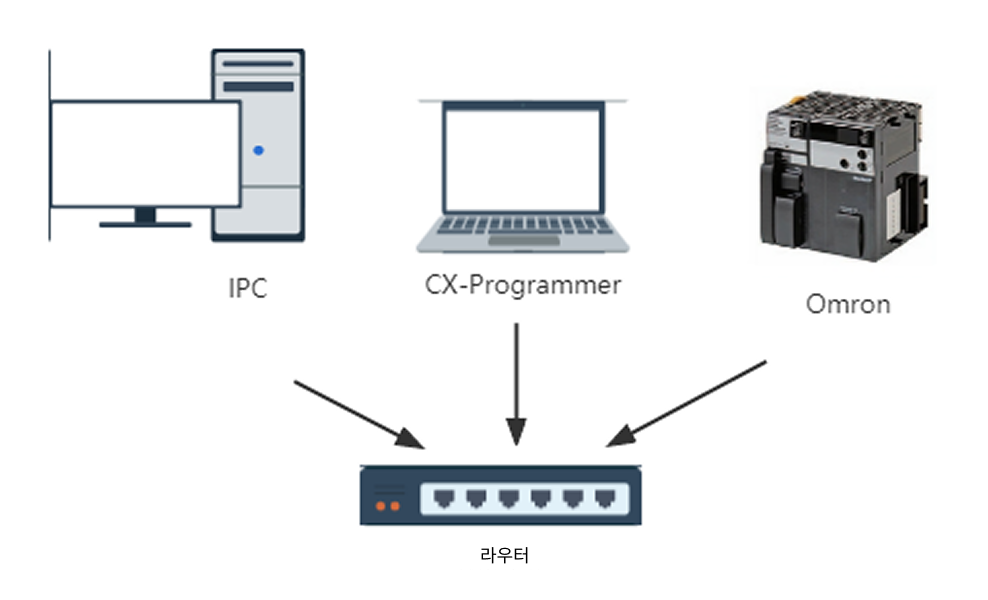
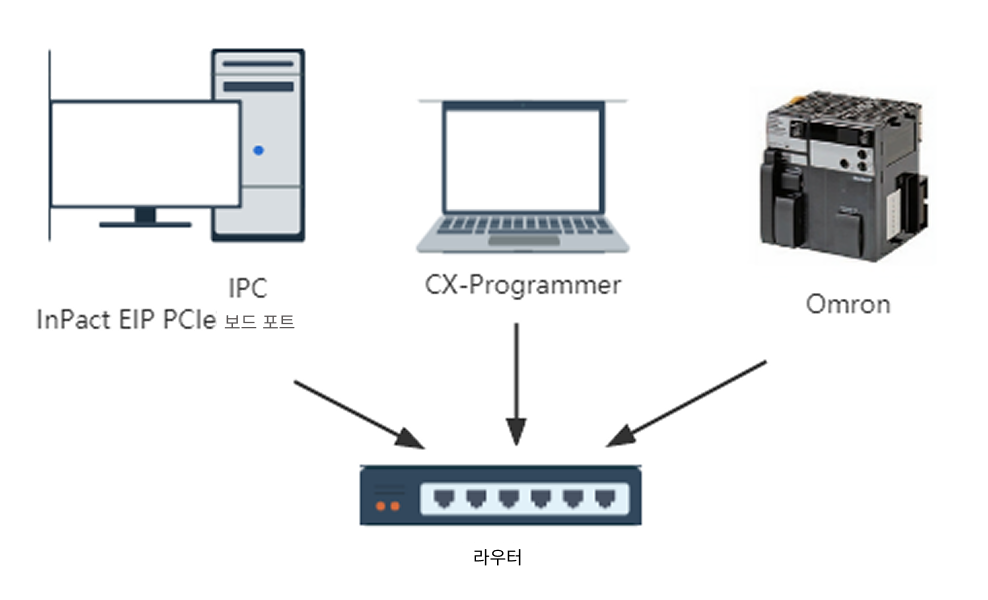
하드웨어 연결 관계는 아래 그림과 같습니다. 각 장비의 IP 주소는 서로 달라야 하며, 동일한 네트워크 세그먼트에 속하고 다른 장비에서 사용되지 않아야 합니다. PLC의 IP 주소 설정은 아래 내용을 참조하십시오.
하드웨어 PCI-e 통신 보드로 EtherNet/IP 통신을 구현하려면 이 행을 클릭하여 필요한 하드웨어 및 하드웨어 연결도를 확인하십시오.
-
PLC: 오므론 NX1P2-1040DT1.
-
IPC 또는 호스트에 표준 PCI-e 통신 보드가 설치되어야 합니다(사용자가 직접 구매하거나 준비해야 함): HMS Ixxat INpact EIP Slave PCIe (INpact EIP 슬레이브 PCIe).
-
스위치(또는 라우터) 및 네트워크 케이블.
하드웨어 연결 관계는 아래 그림과 같습니다. 각 장비의 IP 주소는 서로 달라야 하며, 동일한 네트워크 세그먼트에 속하고 다른 장비에서 사용되지 않아야 합니다. PLC와 통신 보드의 IP 주소 설정은 아래 내용을 참조하십시오.
소프트웨어
소프트웨어로 EtherNet/IP 통신을 구현하려면 이 행을 클릭하여 필요한 소프트웨어를 확인하십시오.
| 소프트웨어 | 설명 | 설치 위치 |
|---|---|---|
Sysmac Studio 표준 버전 1.54 |
오므론 PLC 프로그래밍 소프트웨어 |
오므론 PLC 프로그래밍용 컴퓨터 |
Mech-Vision 및 Mech-Viz 소프트웨어 (버전은 1.5.0 및 이상) |
Mech-Mind 비전 시스템을 제공하는 소프트웨어 |
IPC |
이와 별도로 아래 파일도 준비하여 IPC에서 Sysmac Studio가 설치된 컴퓨터로 복사해야 합니다.
-
비전 시스템 EDS 파일:
005A002B003A0100.EDS.EDS 파일은 Mech-Vision 및 Mech-Viz 소프트웨어 설치 디렉토리의 Communication Component/Robot_Interface/EthernetIP/EDS폴더에 있습니다. -
PLC 샘플 파일:
-
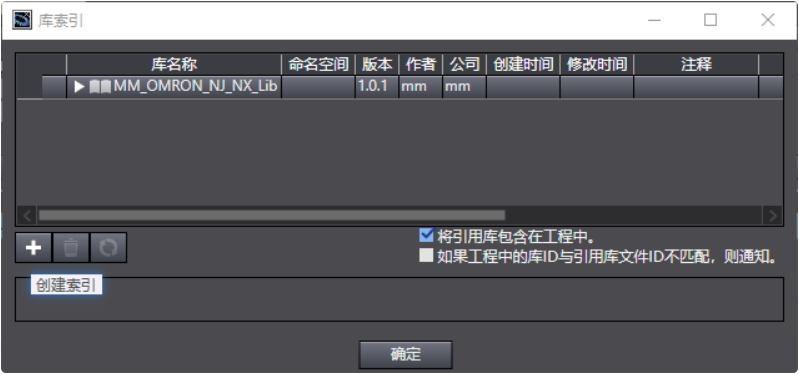
MM_OMRON_NJ_NX_Lib.slr(MM_XXX_XXX 기능을 포함하며, 각종 인터페이스 명령어를 구현하는 데 사용됨); -
MM_OMRON_NJ_NX_Lib_Project.smc2(비전 시스템 수동/자동 모드 샘플 프로젝트).샘플 파일은 IPC의 Communication Component 설치 경로 아래 Robot_Interface/EthernetIP/Programming Samples/Omron Sysmac Studio NXNJ PLC EtherNetIP폴더에 있습니다.
-
하드웨어 PCI-e 통신 보드로 EtherNet/IP 통신을 구현하려면 이 행을 클릭하여 필요한 소프트웨어를 확인하십시오.
| 소프트웨어 | 설명 | 설치 위치 |
|---|---|---|
Sysmac Studio 표준 버전 1.54 |
오므론 PLC 프로그래밍 소프트웨어 |
오므론 PLC 프로그래밍용 컴퓨터 |
통신 보드 및 드라이버 소프트웨어 |
IPC |
|
Mech-Vision 및 Mech-Viz 소프트웨어 (버전은 1.5.0 및 이상) |
Mech-Mind 비전 시스템을 제공하는 소프트웨어 |
IPC |
통신 보드의 IP 주소 설정 |
IPC |
이와 별도로 아래 파일도 준비하여 IPC에서 Sysmac Studio가 설치된 컴퓨터로 복사해야 합니다.
-
비전 시스템 EDS 파일:
005A002B003A0100.EDS.EDS 파일은 Mech-Vision 및 Mech-Viz 소프트웨어 설치 디렉토리의 Communication Component/Robot_Interface/EthernetIP/EDS폴더에 있습니다. -
PLC 샘플 파일:
-
MM_OMRON_NJ_NX_Lib.slr(MM_XXX_XXX 기능을 포함하며, 각종 인터페이스 명령어를 구현하는 데 사용됨); -
MM_OMRON_NJ_NX_Lib_Project.smc2(비전 시스템 수동/자동 모드 샘플 프로젝트).샘플 파일은 IPC의 Communication Component 설치 경로 아래 Robot_Interface/EthernetIP/Programming Samples/Omron Sysmac Studio NXNJ PLC EtherNetIP폴더에 있습니다.
-
IPC 설정 및 통신 시작
비전 IPC 통신 보드 및 드라이버 확인
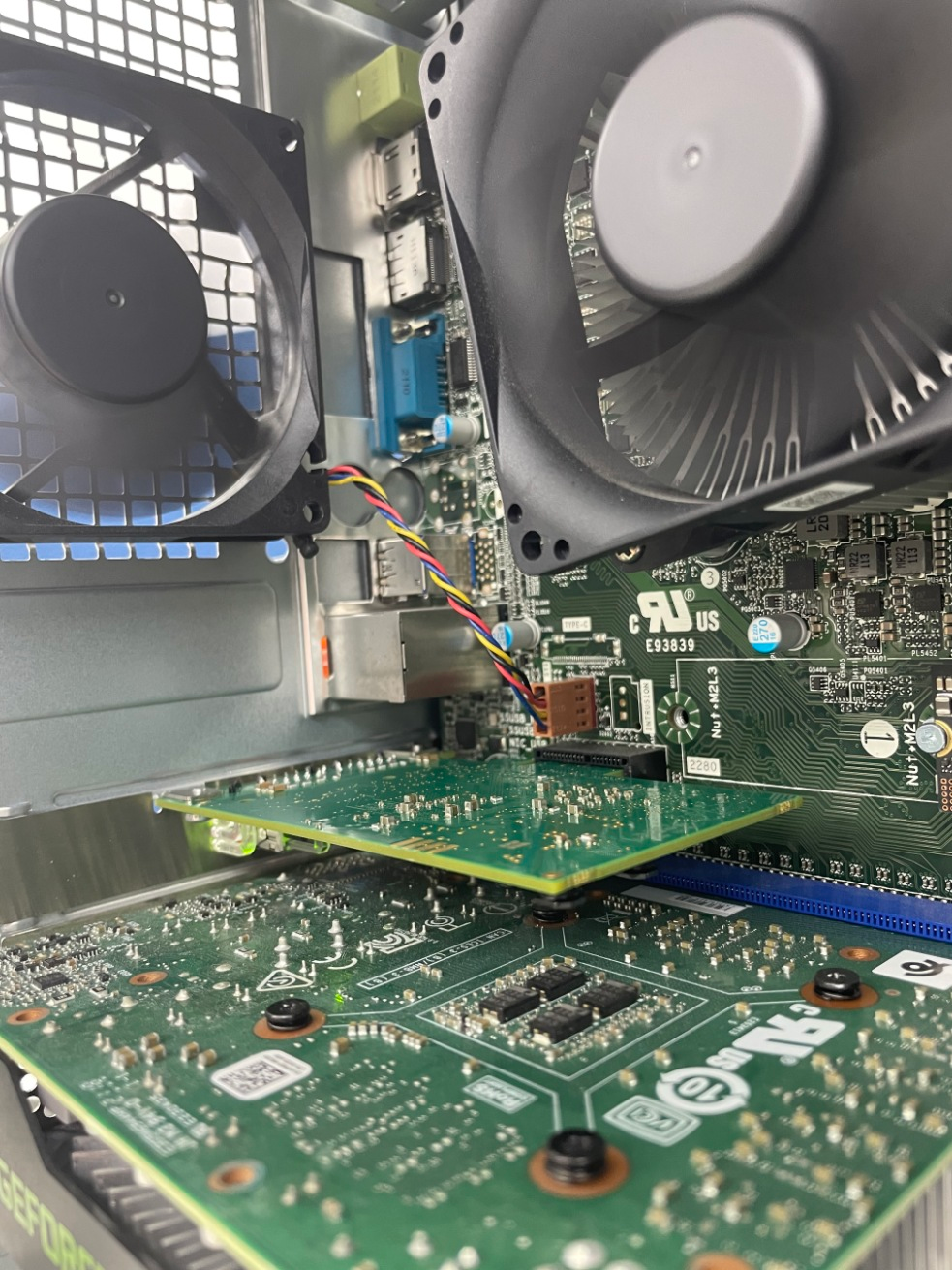
-
비전 IPC의 PCI-e 슬롯에 INpact EIP 슬레이브 PCIe 보드가 설치되어 있는지 확인합니다.
-
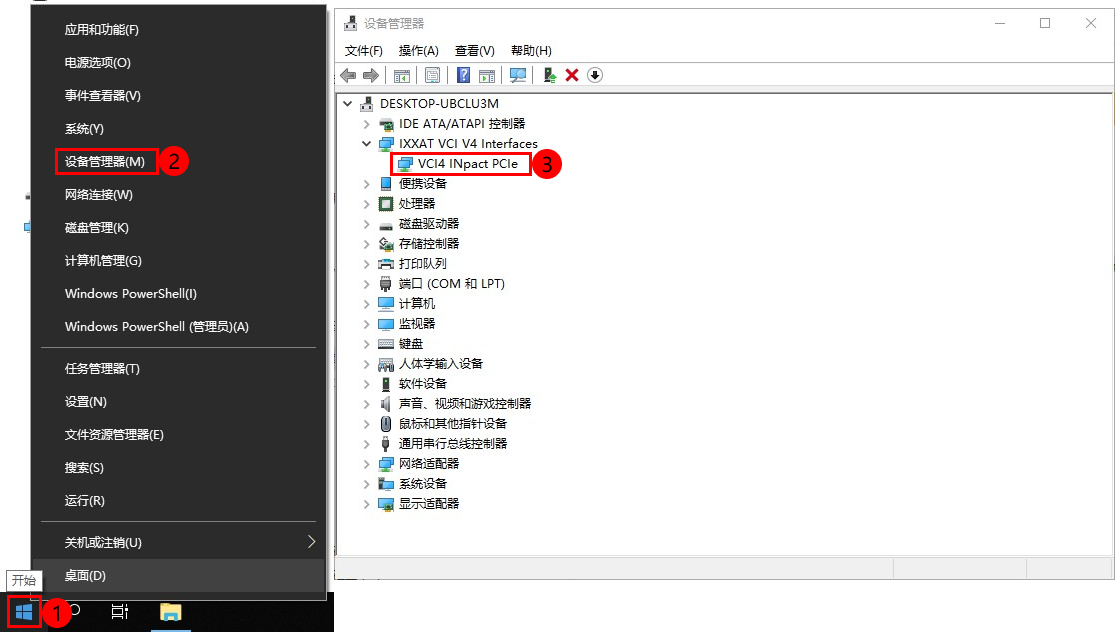
IPC에서 Windows 아이콘을 마우스 오른쪽 버튼으로 클릭하고 장치 관리자를 열어 보드 드라이버 소프트웨어 VCI4 INpact PCIe가 설치되었는지 확인합니다.
Mech-Vision 측 설정 및 통신 시작
-
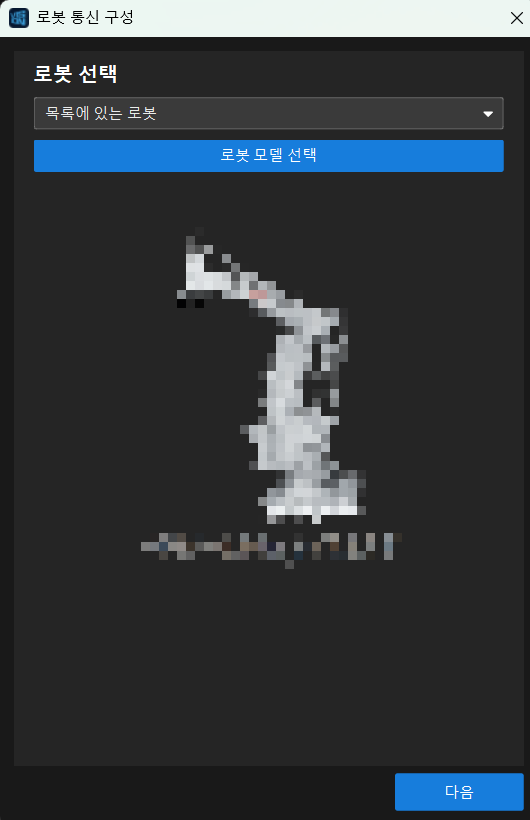
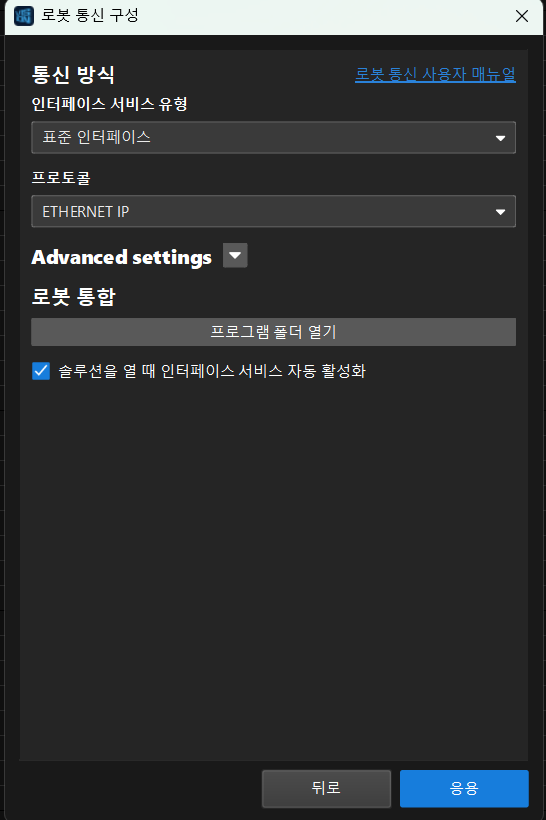
Mech-Vision을 실행하고 "로봇 통신 구성"을 엽니다.
-
필요한 로봇 브랜드와 모델을 선택한 후, 다음을 클릭합니다.
-
인터페이스 서비스 유형을 "표준 인터페이스"로 선택합니다.
-
프로토콜은 “ETHERNET IP”를 선택하고, 기본값으로 “솔루션 열기 시 인터페이스 서비스 자동 실행”을 확인한 다음 적용을 클릭합니다.
-
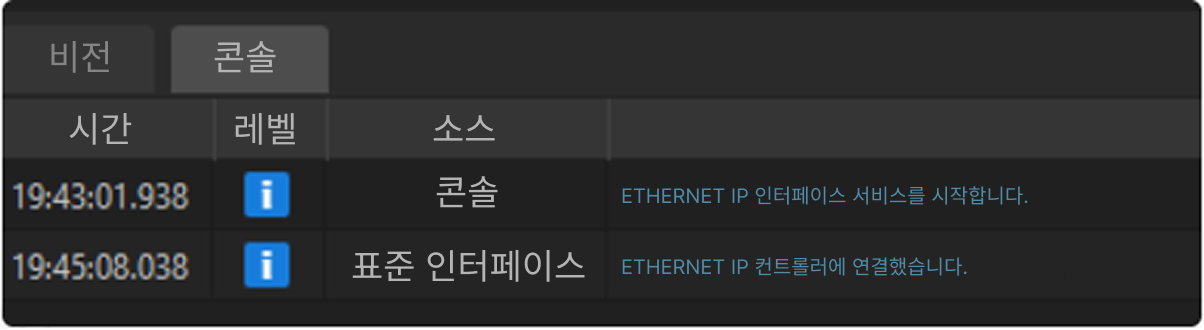
로그 창의 콘솔 탭에서 “ETHERNET IP 인터페이스 서비스” 관련 안내가 표시되는지 확인하고, EtherNet/IP 스캐너(마스터)가 연결될 때까지 기다립니다.

비전 시스템 IPC 통신 보드 IP 주소 설정
-
네트워크 케이블을 사용하여 HMS IPconfig가 설치된 IPC의 네트워크 포트와 IXXAT INpact 통신 보드의 네트워크 포트를 연결합니다.
통신 보드를 설정하고 통신에 성공한 후 여기에 사용된 네트워크 케이블을 제거할 수 있습니다. -
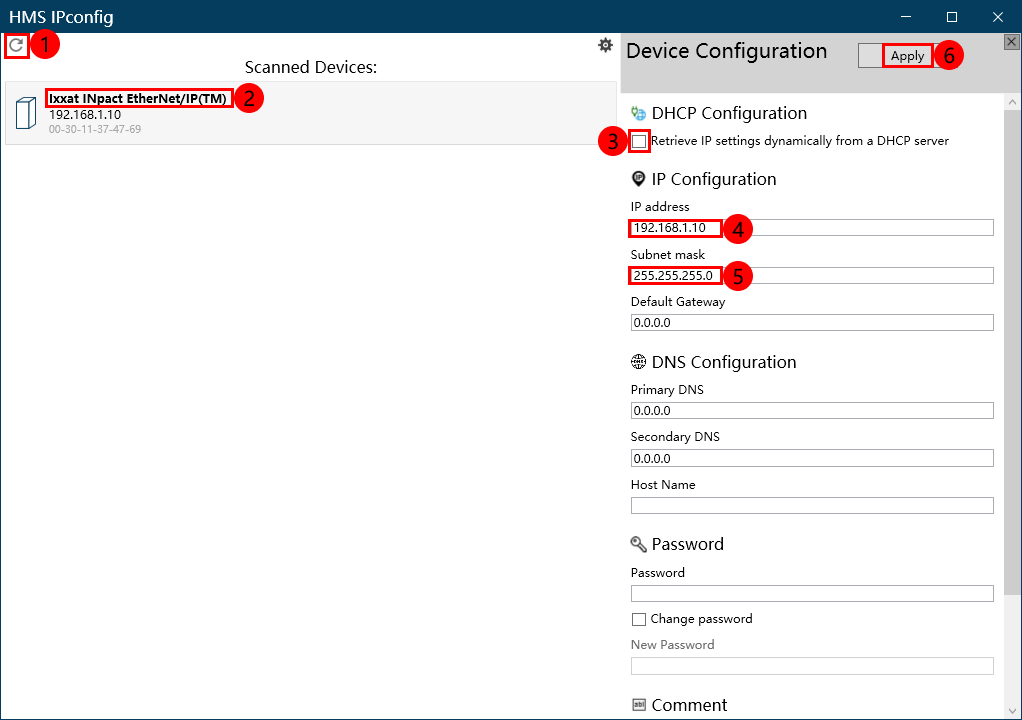
HMS IPconfig 소프트웨어를 열고 스캔을 클릭한 다음 DHCP 선택을 해제하고 보드 IP 주소와 서브넷 마스크를 설정합니다. 설정한 IP 주소는 PLC에 구성된 IP 주소와 일치해야 합니다. 설정을 완료한 후 Apply를 클릭하고 소프트웨어를 종료합니다.
PLC 프로젝트 생성 및 비전 라이브러리 파일 참조
PLC 프로젝트를 만들기
-
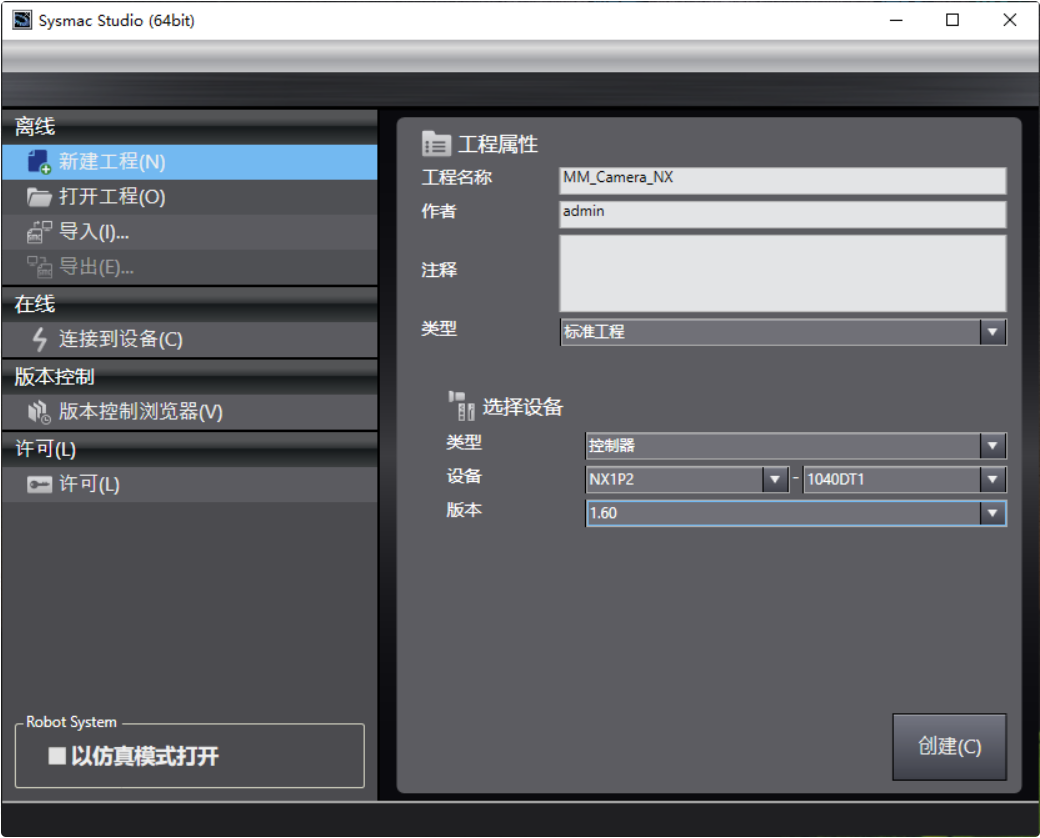
Sysmac Studio를 열고 “새 프로젝트”를 클릭한 다음, “프로젝트 속성” 창에서 프로젝트 이름을 입력하고 유형은 “표준 프로젝트”를 선택합니다.
-
실제 장치에 따라 장치 유형, 모델 및 버전을 선택한 후 “생성”을 클릭하여 소프트웨어 메인 화면으로 들어갑니다.
-
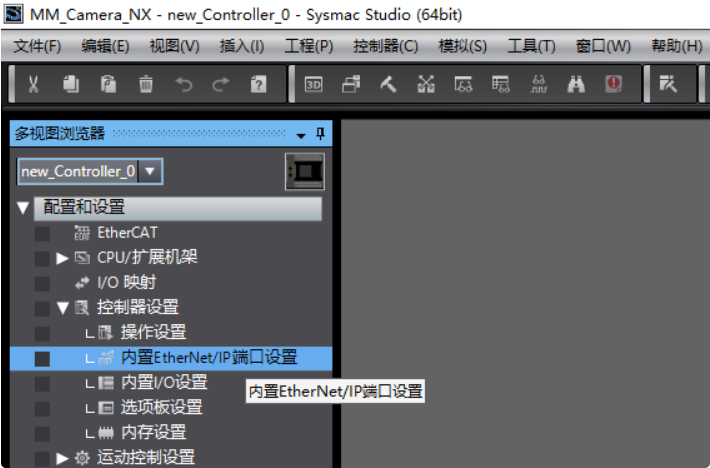
“멀티뷰 탐색기”에서 “구성 및 설정/컨트롤러 설정”을 차례로 펼치고, “내장 EtherNet/IP 포트 설정”을 더블클릭합니다.
-
“TCP/IP 설정” 탭에서 고정 IP를 선택하고, IP 주소와 서브넷 마스크를 설정합니다(예:
192.168.1.22/255.255.255.0).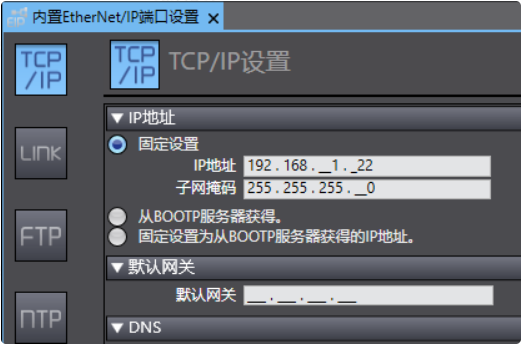
PLC, 비전 슬레이브 스테이션 및 Sysmac Studio가 설치된 컴퓨터의 네트워크 포트 IP 주소는 동일한 네트워크 대역에 있어야 합니다. -
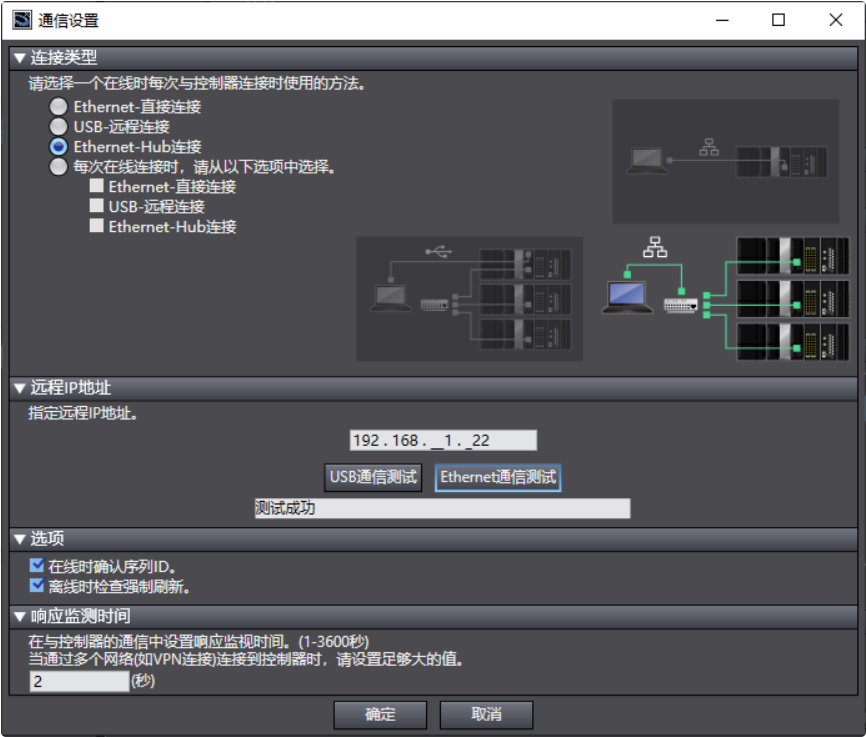
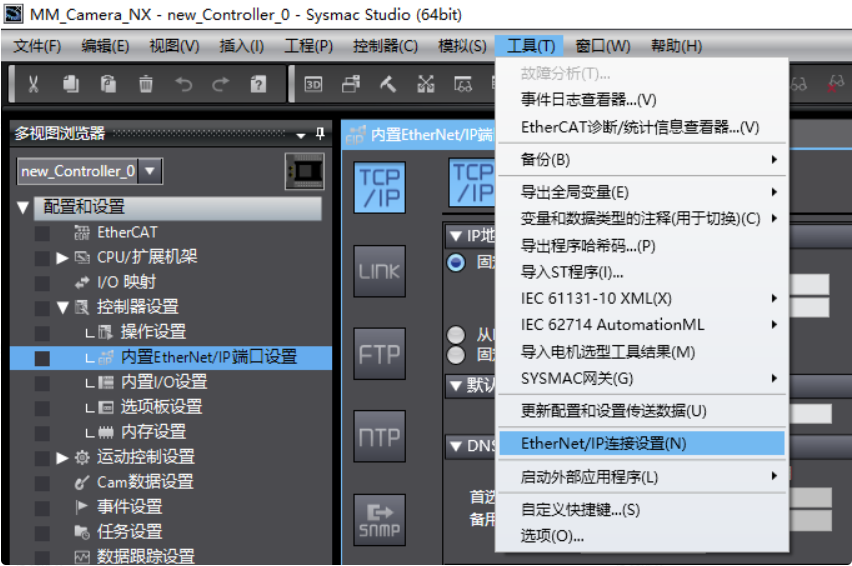
메뉴 바에서 차례로 을 클릭하고, 연결 유형은 “Ethernet-Hub 연결”을 선택합니다. 원격 IP에는 PLC 주소를 입력합니다(예:
192.168.1.22). 이후 “Ethernet 통신 테스트”를 실행하고, 테스트 성공을 확인합니다.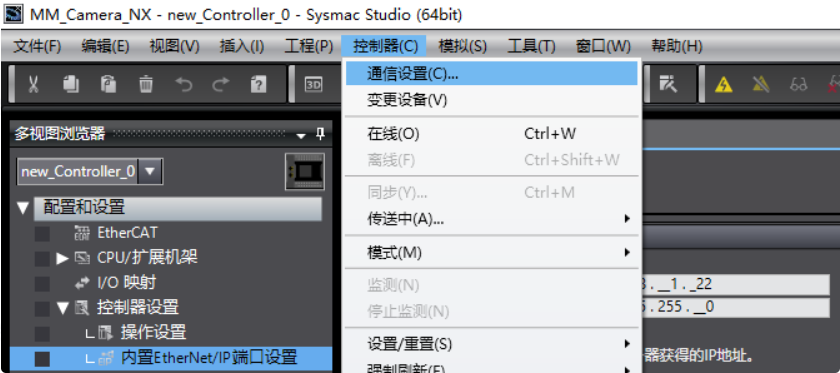



내장 EtherNet/IP 포트 설정 및 다운로드
태그 세트 등록
-
메뉴 바에서 차례로 을 클릭하여 “EtherNet/IP 장치 목록” 창을 엽니다.
-
PLC에 대응하는 장치(예:
192.168.1.22)를 더블클릭하여 “EtherNet/IP 연결 설정”을 엽니다.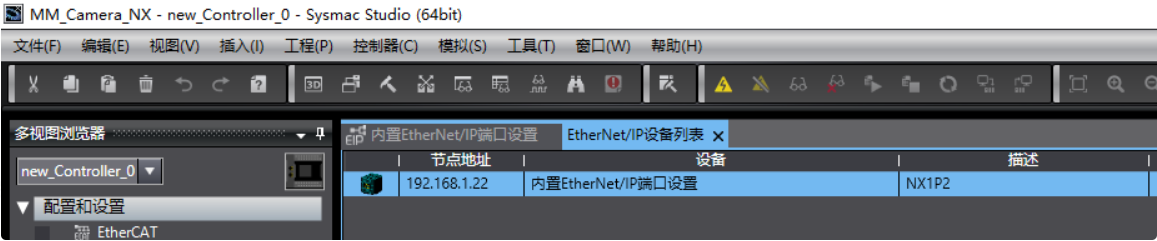
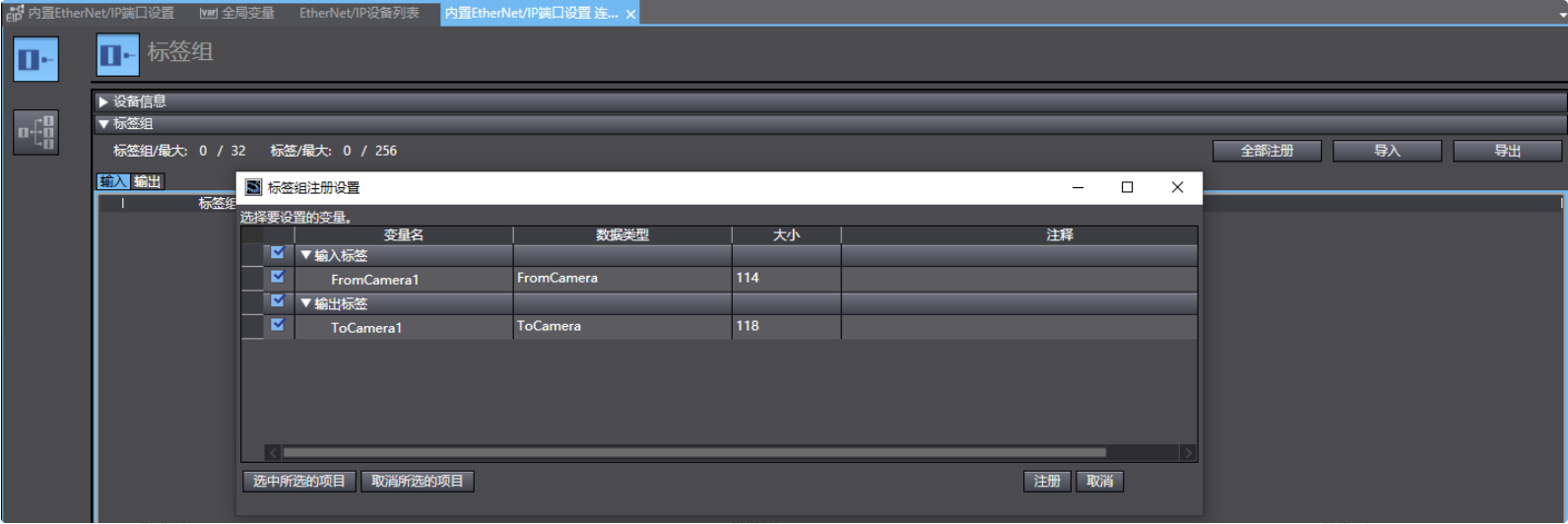
-
“태그 세트” 탭에서 “모두 등록”을 클릭하고, “태그 세트 등록 설정” 창이 나타나면 “등록”을 클릭합니다.
EDS 파일 설치 및 설정 다운로드
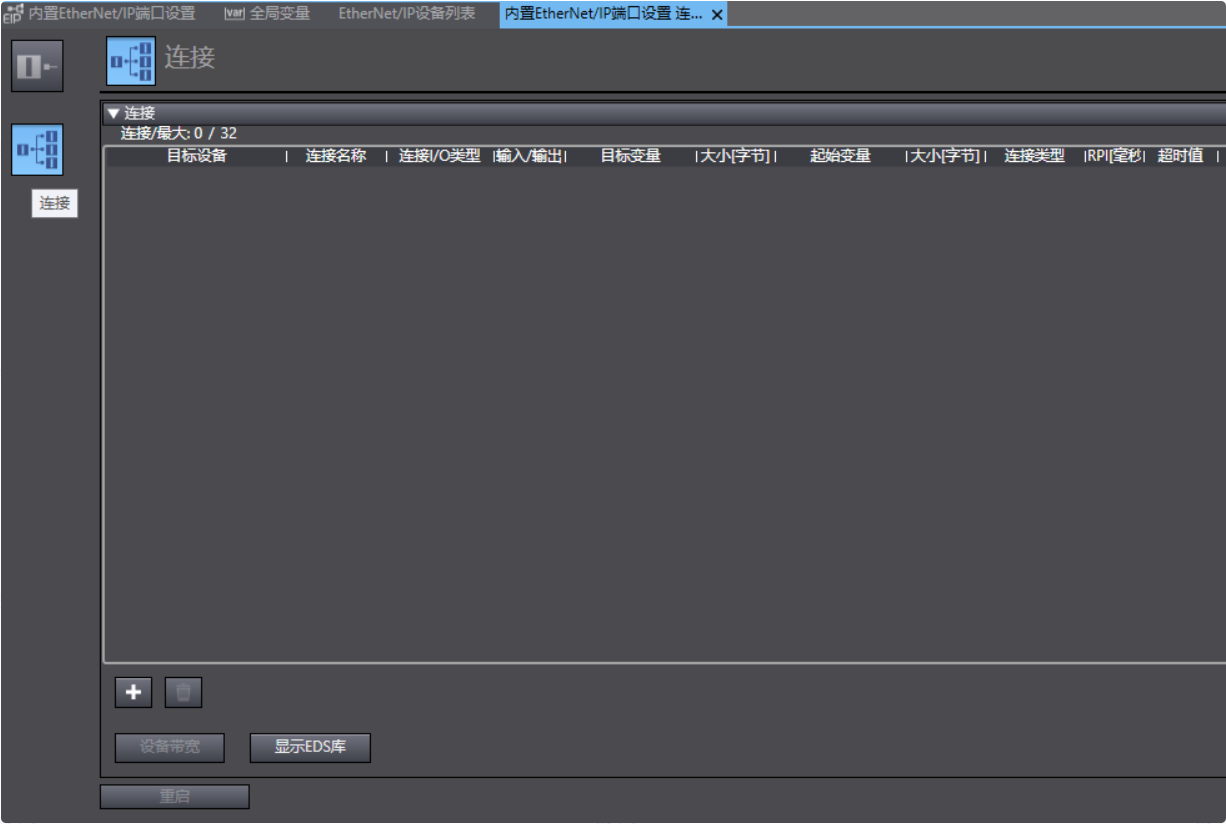
-
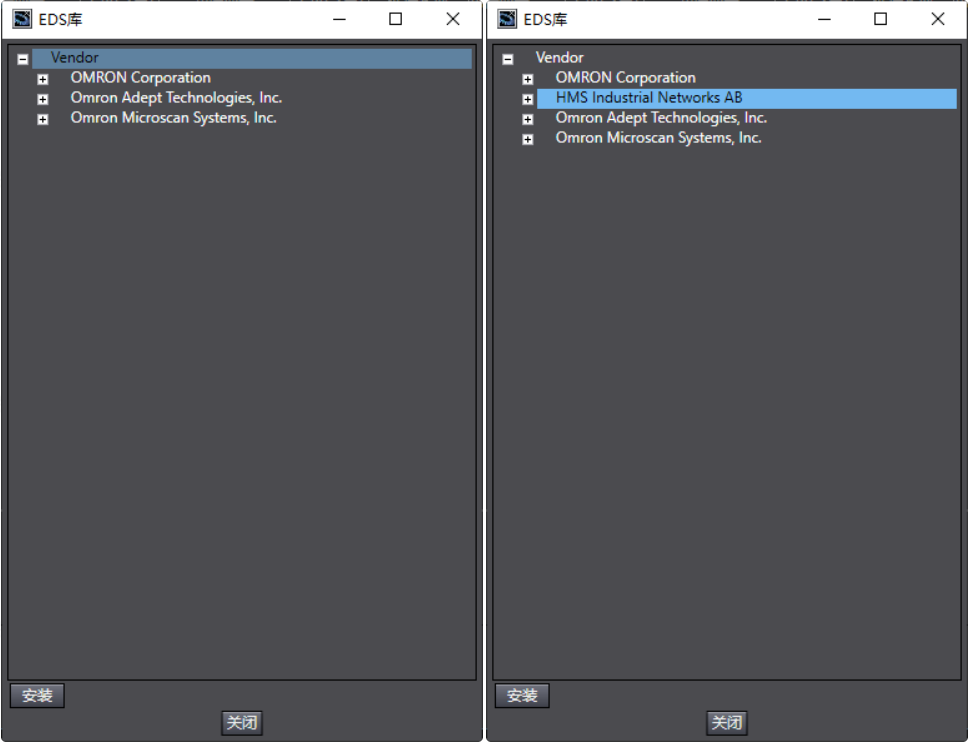
“EtherNet/IP 연결 설정” 창에서 왼쪽의 “연결” 아이콘을 클릭한 후, 연결 옵션 탭에서 “EDS 라이브러리 표시”를 클릭합니다.
-
“EDS 라이브러리” 창에서 “설치”를 클릭하고, `005A002B003A0100.EDS`를 선택하여 설치를 완료합니다.
-
“EtherNet/IP 연결 설정” 창으로 돌아가 오른쪽 도구 상자에서 “대상 장치 추가”를 클릭합니다.

-
노드 주소는 HMS IPconfig와 일치하는 주소를 입력합니다(예:
192.168.1.10). 유형은 `Ixxat INpact EtherNet/IP™`를 선택하고, 리비전은 `1`을 선택한 후 “추가”를 클릭합니다.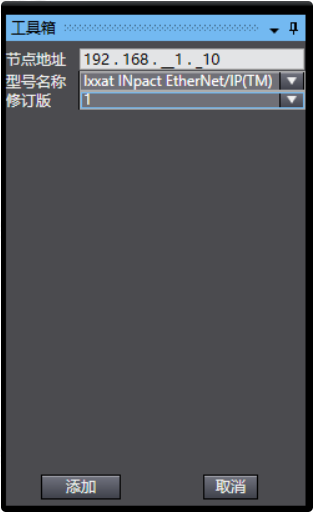
-
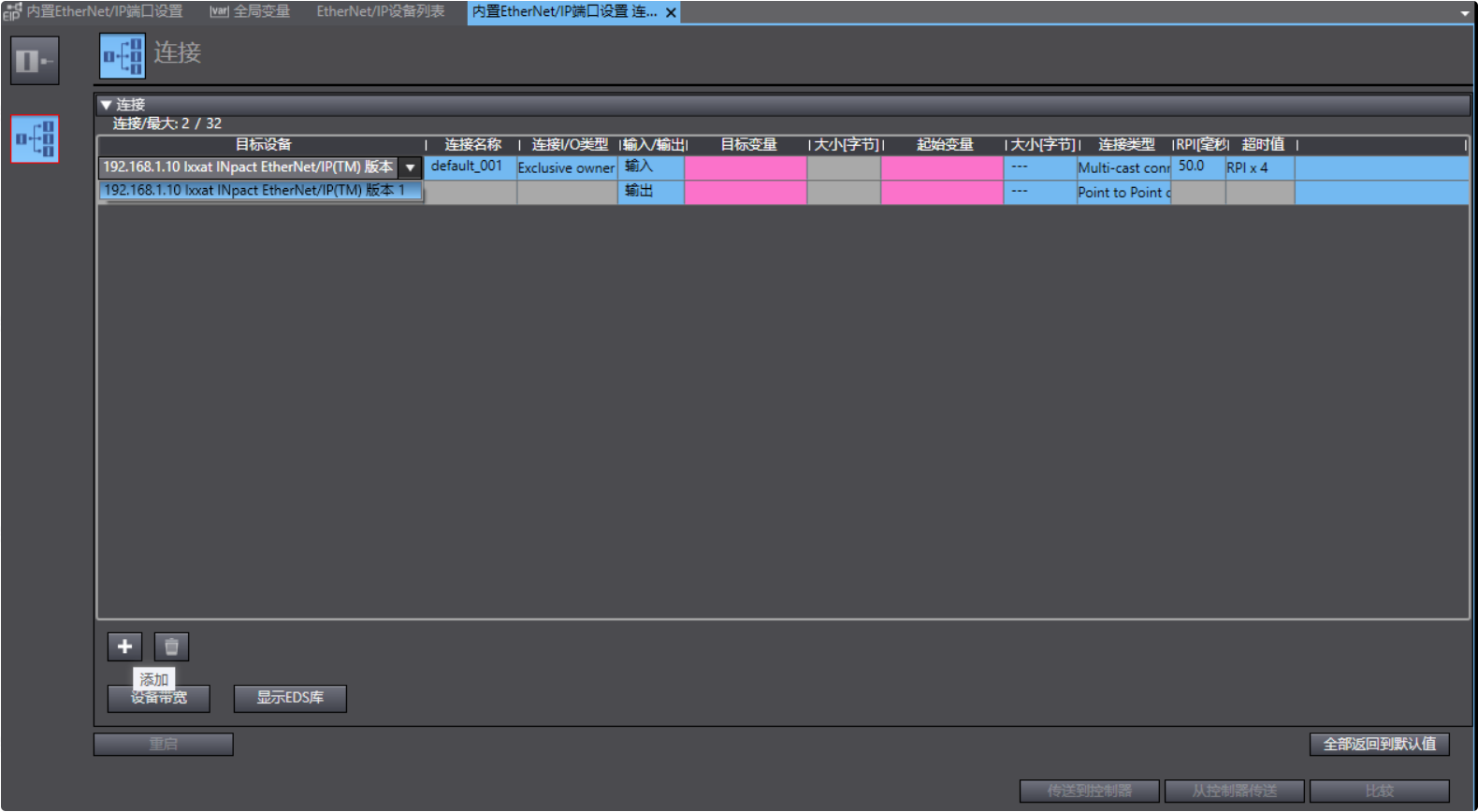
연결 목록 아래에서 “추가”를 클릭하고, 대상 장치로 방금 추가한 `192.168.1.10 Ixxat INpact EtherNet/IP ™ Rev. 1`을 선택합니다.
-
설정 화면에 따라 통신 파라미터를 입력하고, “분홍색 경고” 안내가 없는지 확인합니다.

-
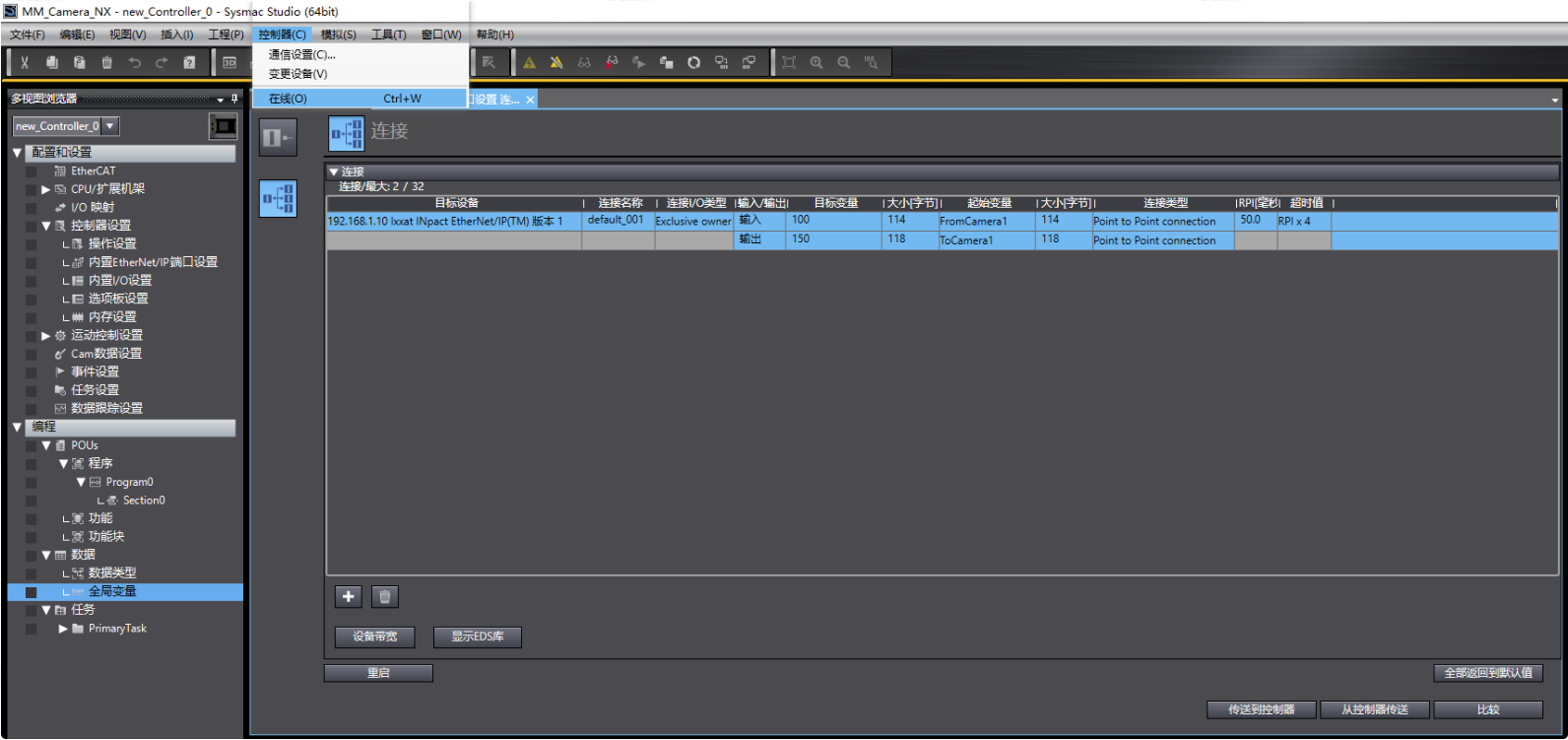
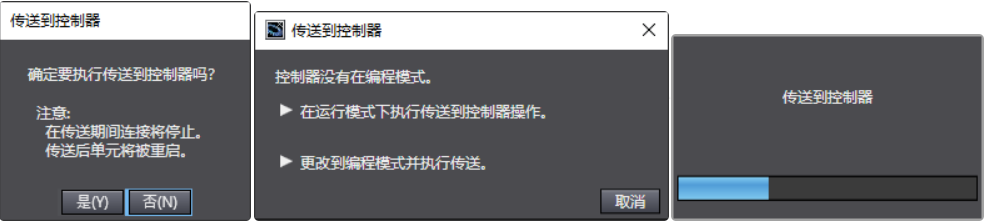
프로젝트를 온라인 상태로 전환한 후 “컨트롤러로 전송”을 클릭합니다.
-
외부 장치의 안전이 확보된 것을 확인한 상태에서, 안내에 따라 예를 클릭하고 “실행 모드에서 제어기 작업 다운로드”를 선택합니다.
PLC 프로젝트 다운로드
-
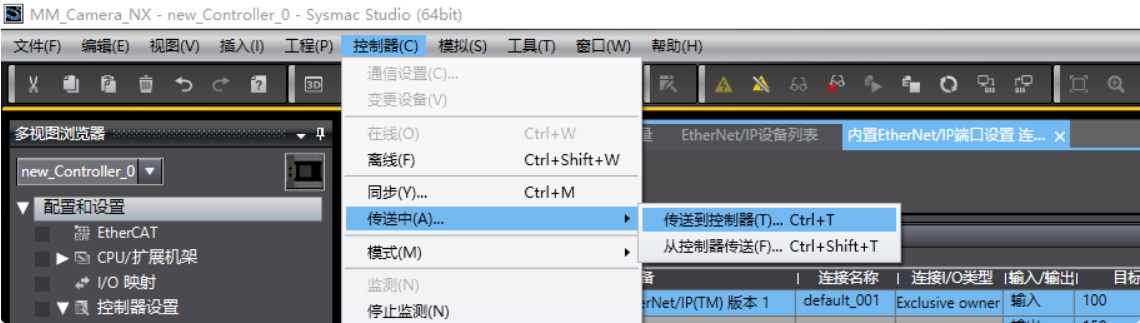
메뉴 바에서 차례로 을 클릭하여, 프로젝트가 온라인 상태로 전환되었는지 확인합니다.

-
메뉴 바에서 차례로 을 클릭하여 프로젝트를 PLC로 전송합니다.
-
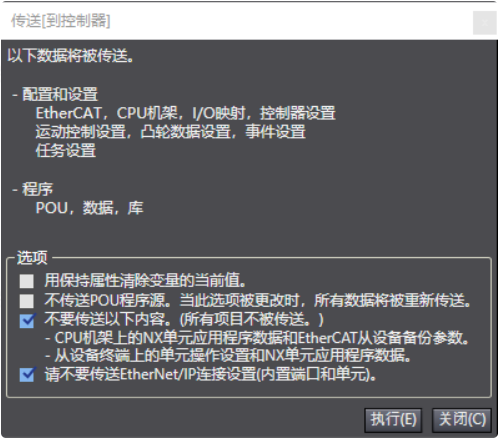
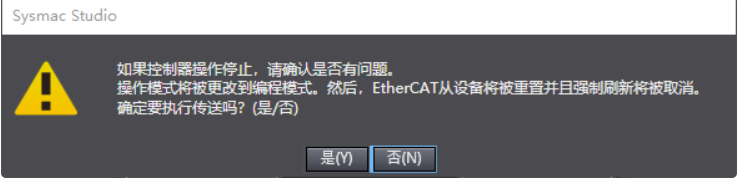
“컨트롤러로 전송” 팝업 창에서 실행을 클릭하고, 안전 확인 후 예를 클릭합니다.
-
프로젝트 전송이 완료되면, 외부 장치의 안전이 확보된 상태에서 안내에 따라 예와 확인을 클릭합니다.
통신 성공 여부 확인
-
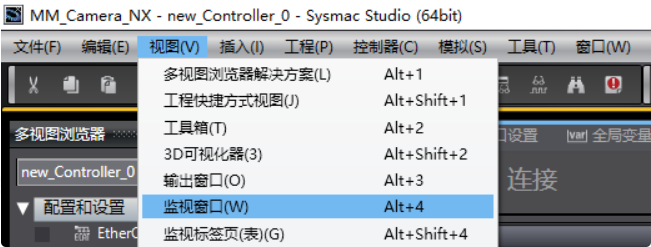
메뉴 바에서 차례로 을 클릭하여 “모니터(프로젝트)” 창을 엽니다.
-
모니터 창에 전역 변수
FromCamera1`을 추가합니다. 연결에 성공하면 `FromCamera1.HEARTBEAT하트비트 값이 계속 변하는 것을 확인할 수 있습니다.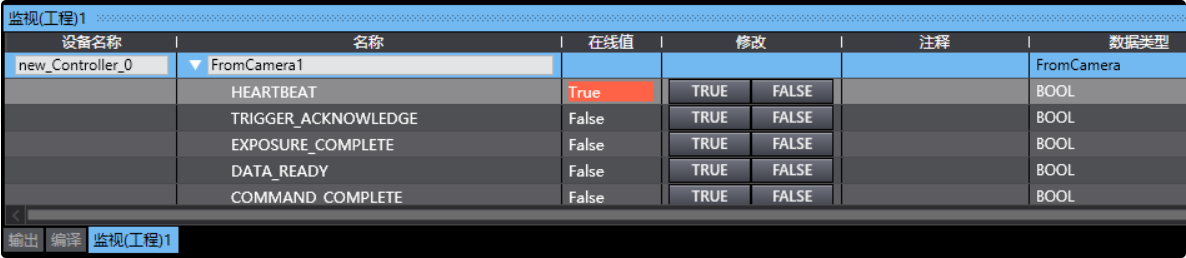
-
Mech-Vision 로그 창의 콘솔 탭에서 “ETHERNET IP 제어기에 연결 성공” 메시지가 표시되는지 확인합니다.
해당 로그가 없으면 아래 사항이 정상인지 확인합니다: .. 하드웨어 네트워크 연결 상태 .. Mech-Vision 인터페이스 서비스 실행 상태 .. PLC 측 EtherNet/IP 설정 상태
비전 프로젝트 테스트
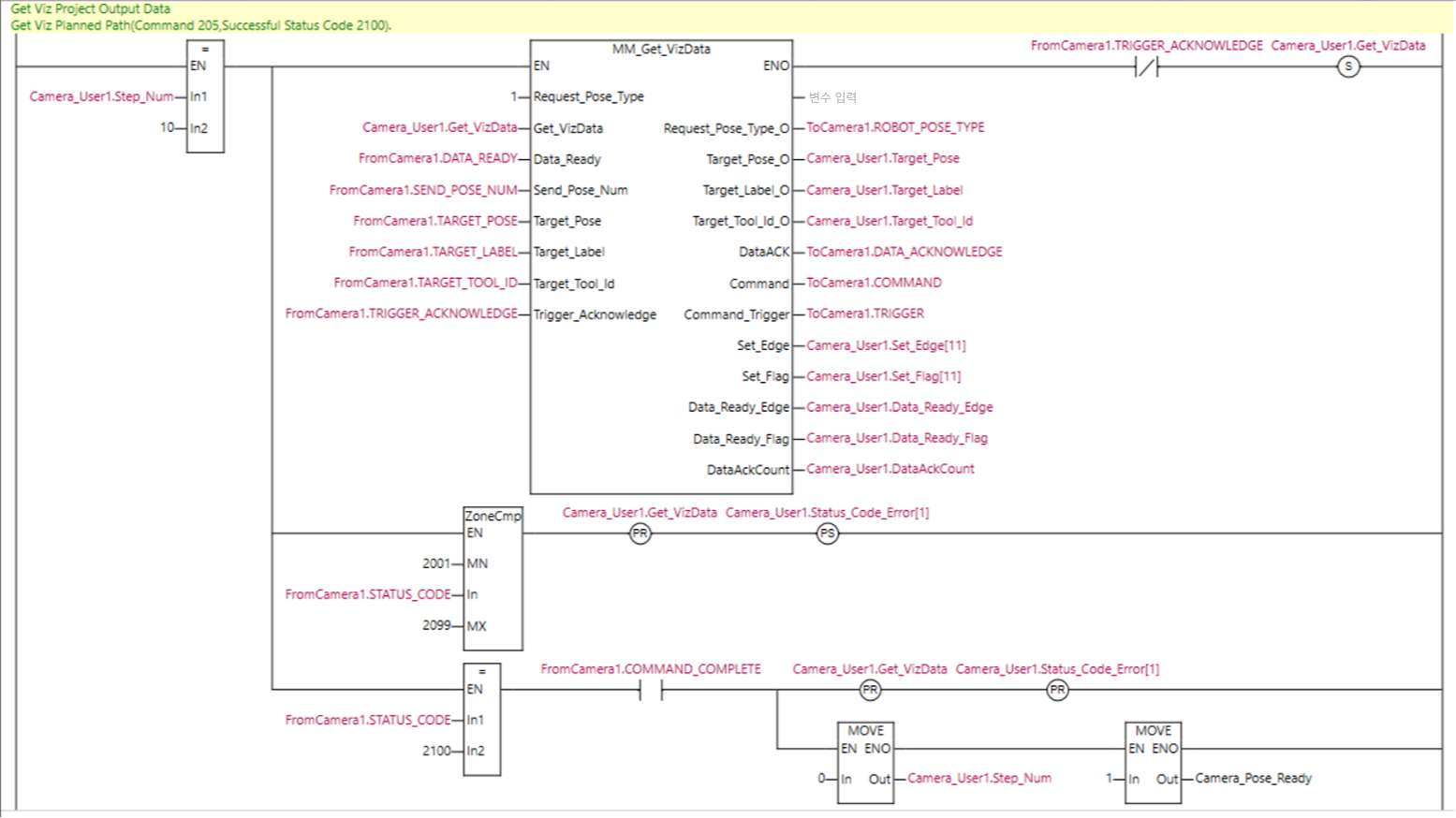
이 섹션에서는 샘플 프로그램 기능 블록으로 Mech-Vision 프로젝트를 트리거하여 비전 포인트를 획득하고 Mech-Viz 프로젝트를 트리거하여 계획 경로를 획득하는 방법을 소개합니다. IO 모듈 기능 설명은 오므론 NX/NJ PLC와 Mech-Mind 시스템 간 EtherNet/IP 통신 명령어 설명을 참조하십시오.
사전 준비
-
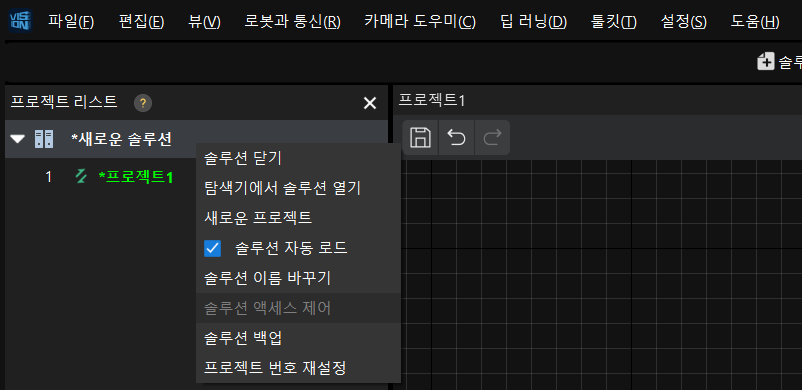
Mech-Vision 프로젝트를 생성하고, 현재 프로젝트가 자동 로드되도록 설정합니다.
-
Mech-Viz 프로젝트를 생성하고, 현재 프로젝트가 자동 로드되도록 설정합니다.

-
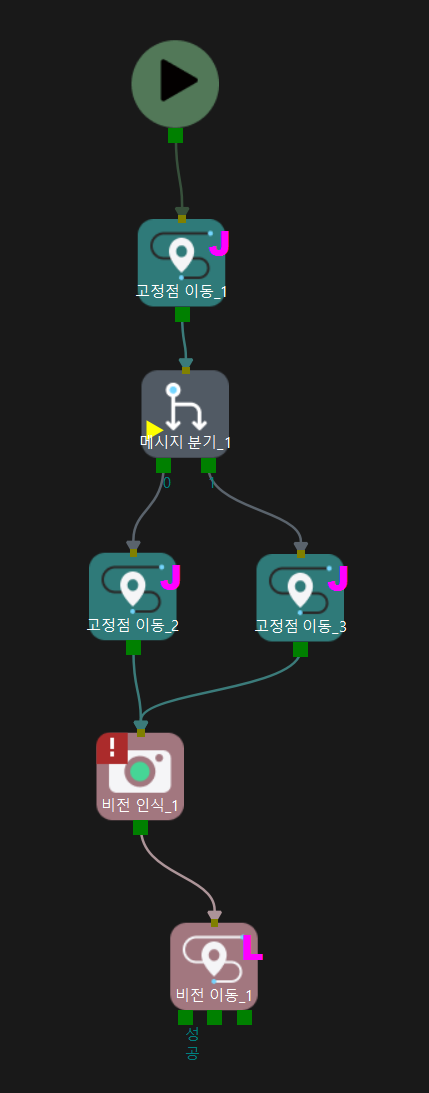
테스트에 사용하는 Mech-Viz 프로젝트에는 “작업 이름이 1인 하위 작업”이 포함되어 있어야 합니다.
Mech-Vision에서 비전 포인트를 획득하기
파라미터 설정
-
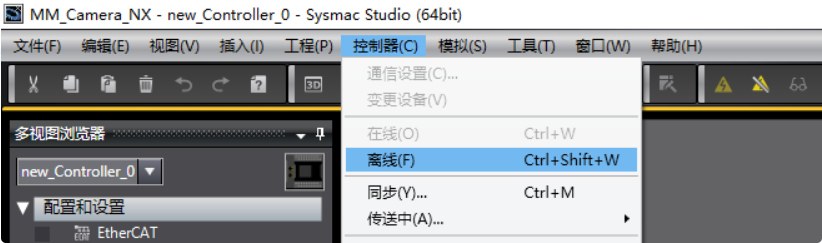
소프트웨어 메인 창에서 “컨트롤러” / “오프라인”을 클릭하여 PLC 프로젝트를 오프라인 상태로 전환합니다.
-
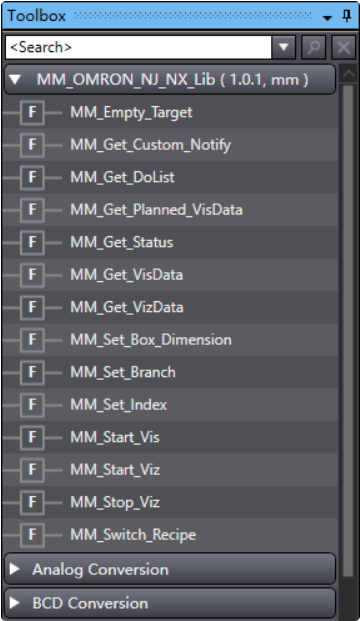
왼쪽 멀티뷰 탐색기에서 “편집” / “POUs” / “프로그램” / “Program0”을 차례로 펼친 뒤 “Section0”을 더블클릭합니다. 오른쪽 도구 상자에 PLC 연동용 비전 라이브러리 파일이 표시됩니다.
-
프로그램 세그먼트에서 PLC와 비전의 상호작용을 활성화합니다(예: 비트
ToCamera1.COMM_ENABLE설정).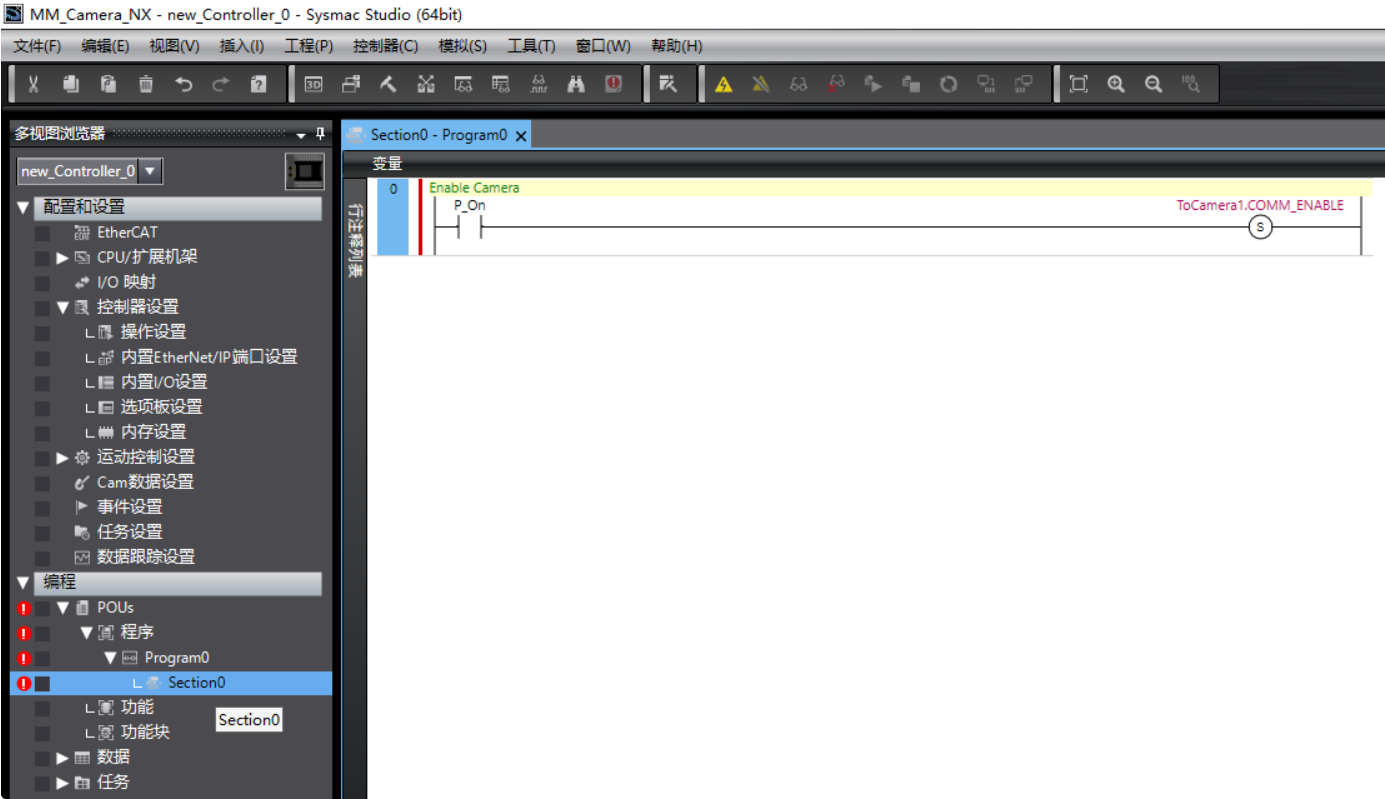
“Section0” 제목 표시줄에서 “변수”를 클릭하고, “외부” 옵션 아래에 그림과 같이 필요한 외부 변수 3개(예:
ToCamera1,FromCamera1,Camera_User1)를 추가한 후, 해당 데이터 유형이 라이브러리 파일에 정의된 구조체와 일치하는지 확인합니다.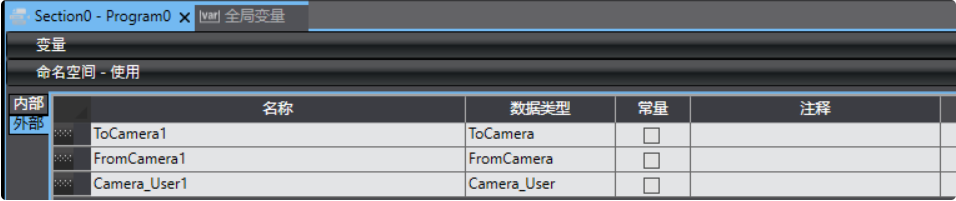
-
비전 프로젝트 번호를 설정합니다:
VISION_PROJ_NUM=1. 이는 배포 설정에서 ID가 1인 Mech-Vision 프로젝트를 실행한다는 의미입니다. -
반환할 포즈 개수를 설정합니다:
REQ_POSE_NUM=0, 이는 모든 포즈 결과를 반환함을 의미합니다.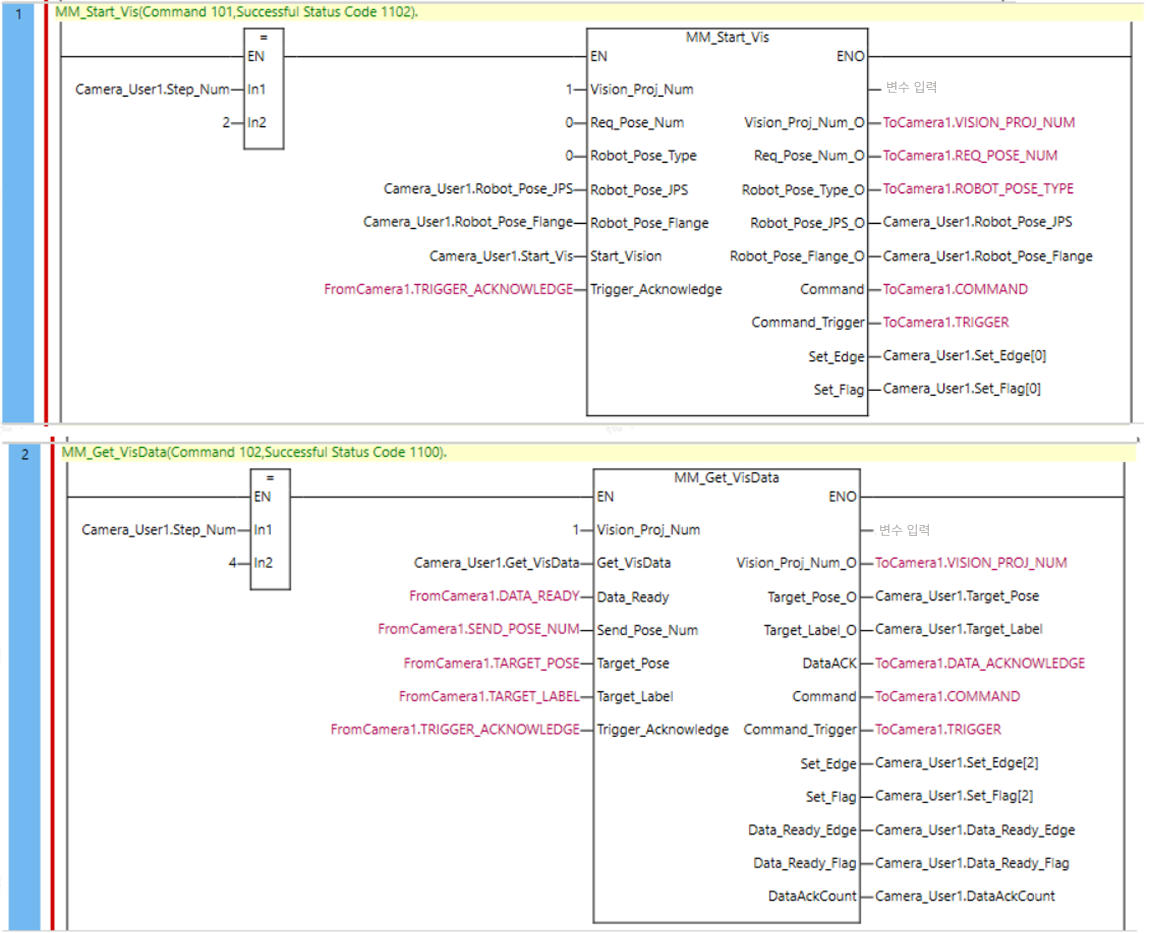
프로그램 작성은 `MM_OMRON_NJ_NX_Lib_Project.smc2`의 비전 시스템 수동 모드 샘플을 참조할 수 있습니다.
Mech-Vision 프로젝트 실행을 트리거하기
-
PLC 프로젝트를 다운로드하고 온라인으로 전환합니다.
-
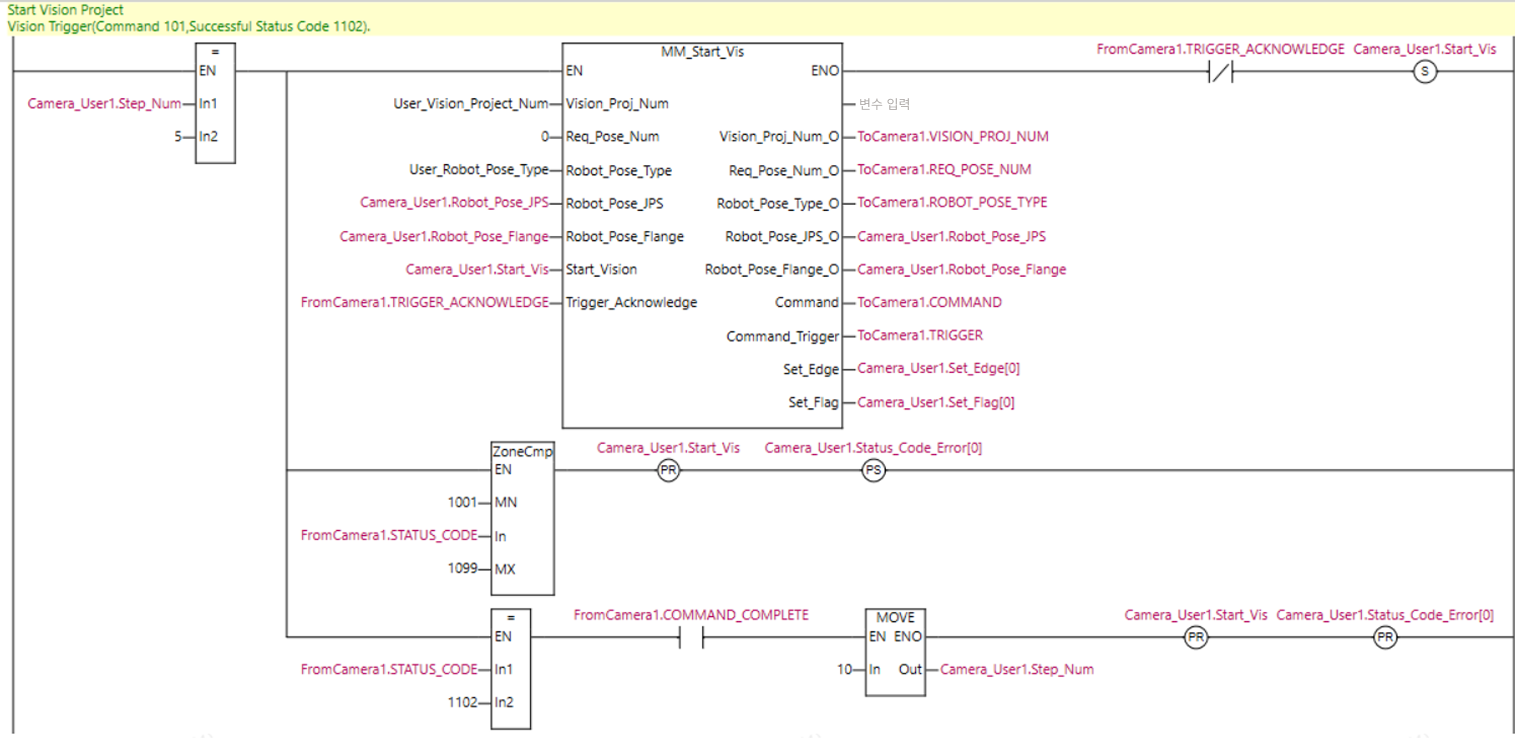
MM_Start_Vis입력 변수를 트리거합니다(예: `Camera_User1.Start_Vis`를 `True`로 설정한 후 다시 `False`로 복원).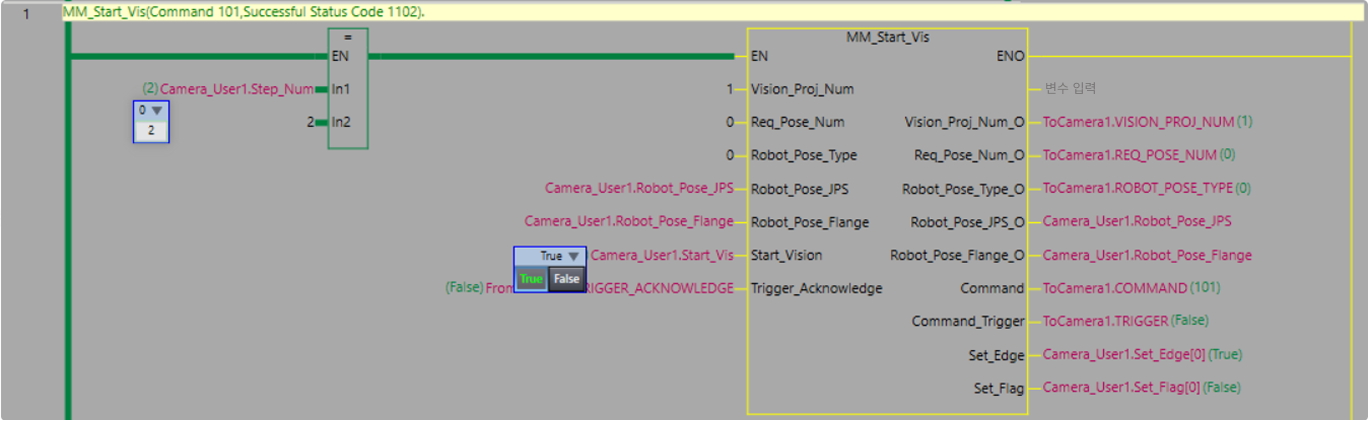
-
FromCamera1.STATUS_CODE반환값이 `1102`인지 확인합니다. `10XX`이면 표준 인터페이스 상태 코드 및 오류 분석를 참조하여 점검합니다.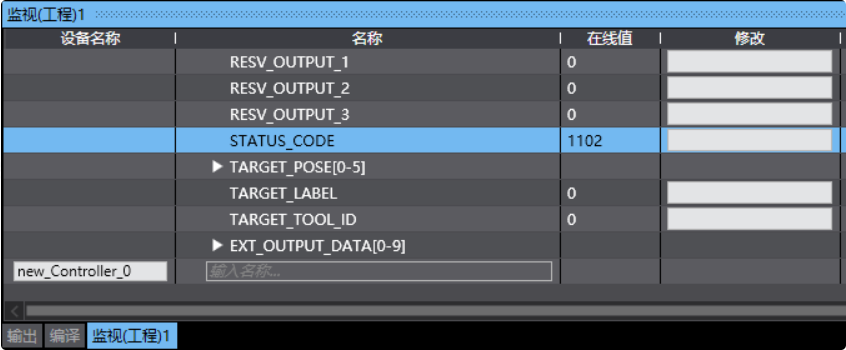
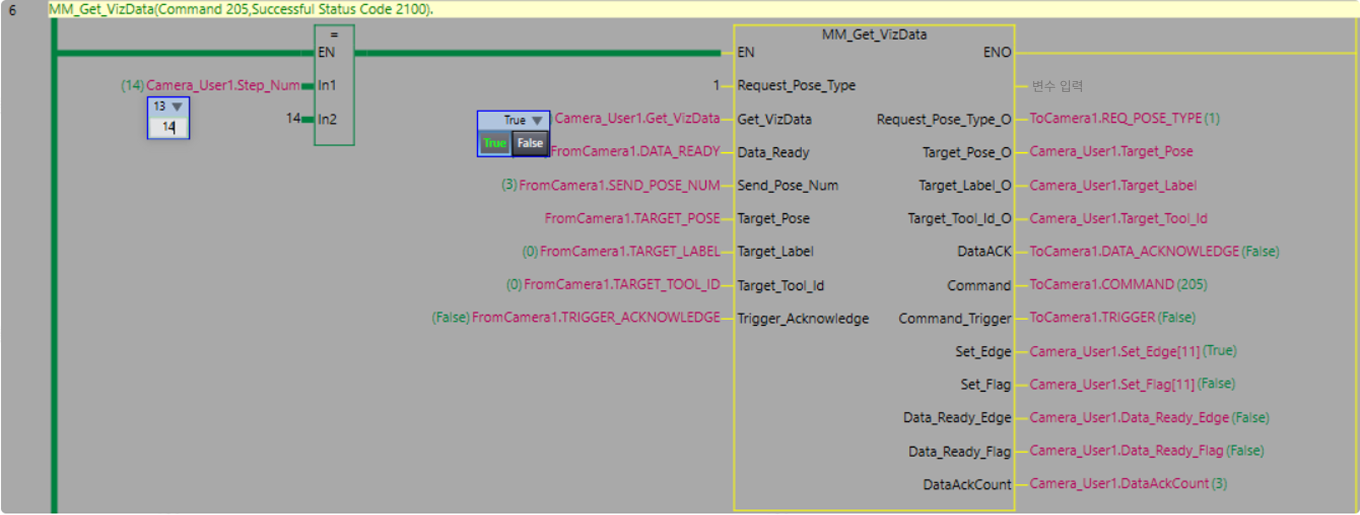
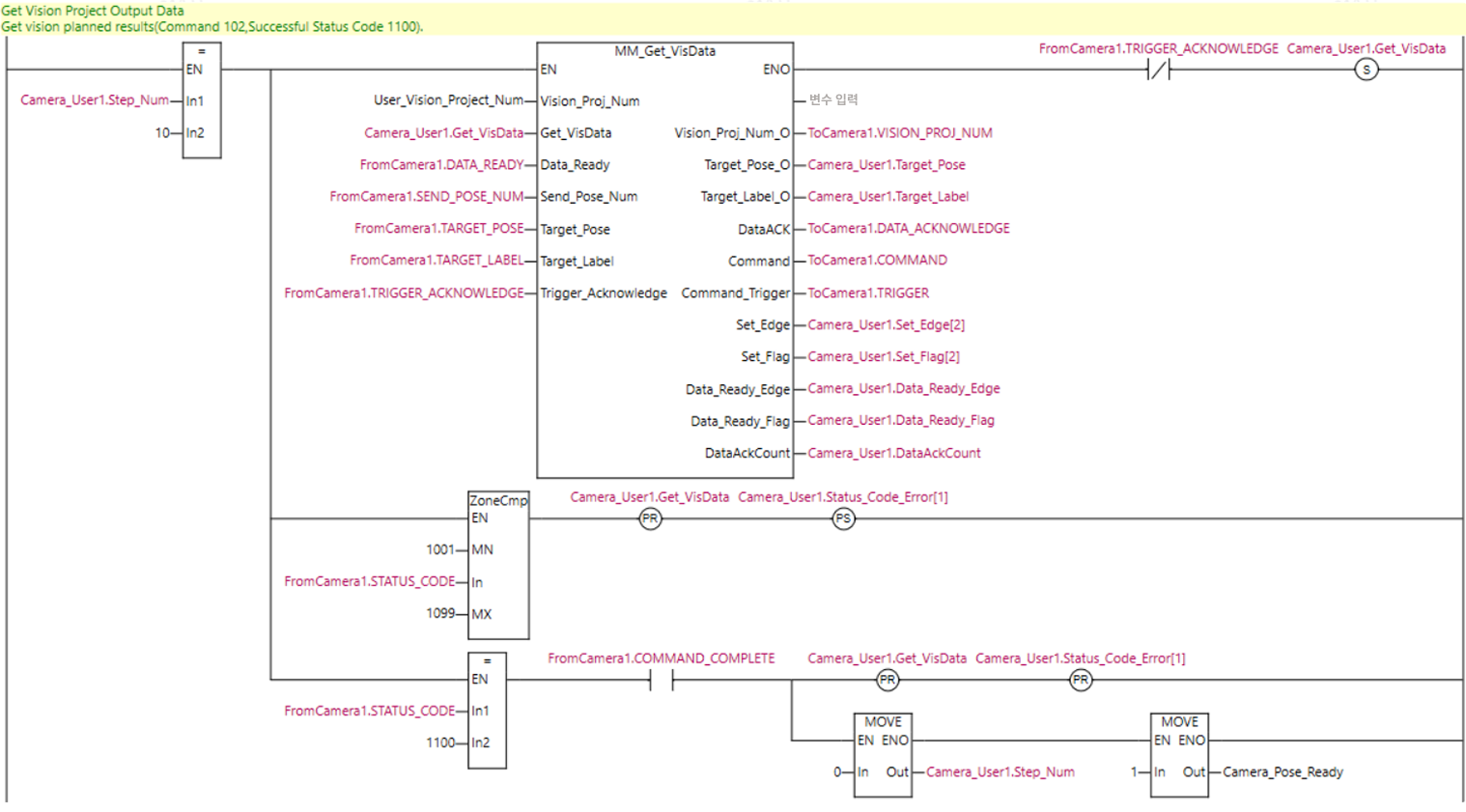
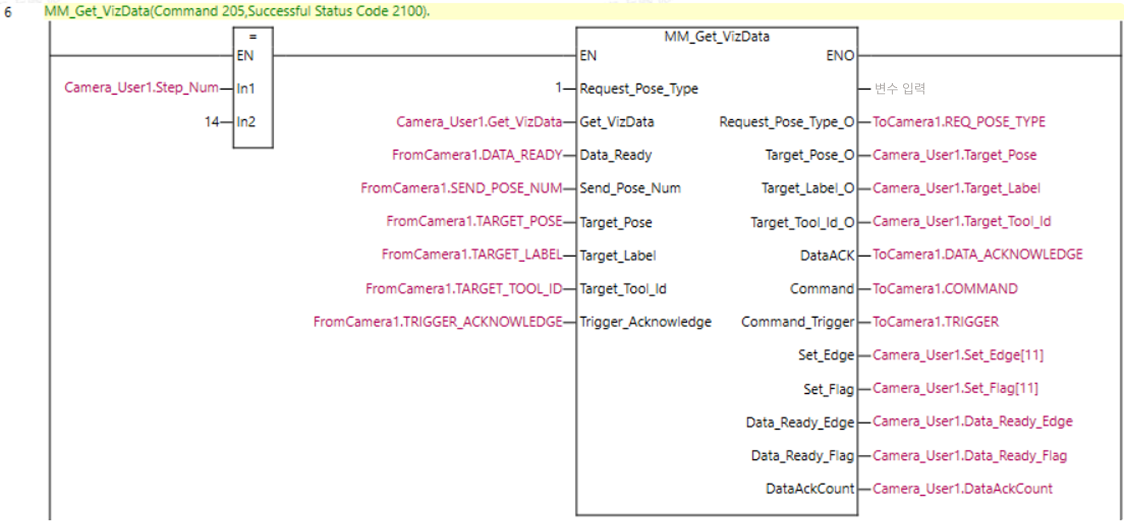
Mech-Vision에서 계산된 포즈 결과를 획득하기
-
STATUS_CODE=1102`가 된 후, `MM_Get_VisData입력 변수를 트리거합니다(예: `Camera_User1.Get_VisData`를 `True`로 설정한 후 다시 `False`로 복원).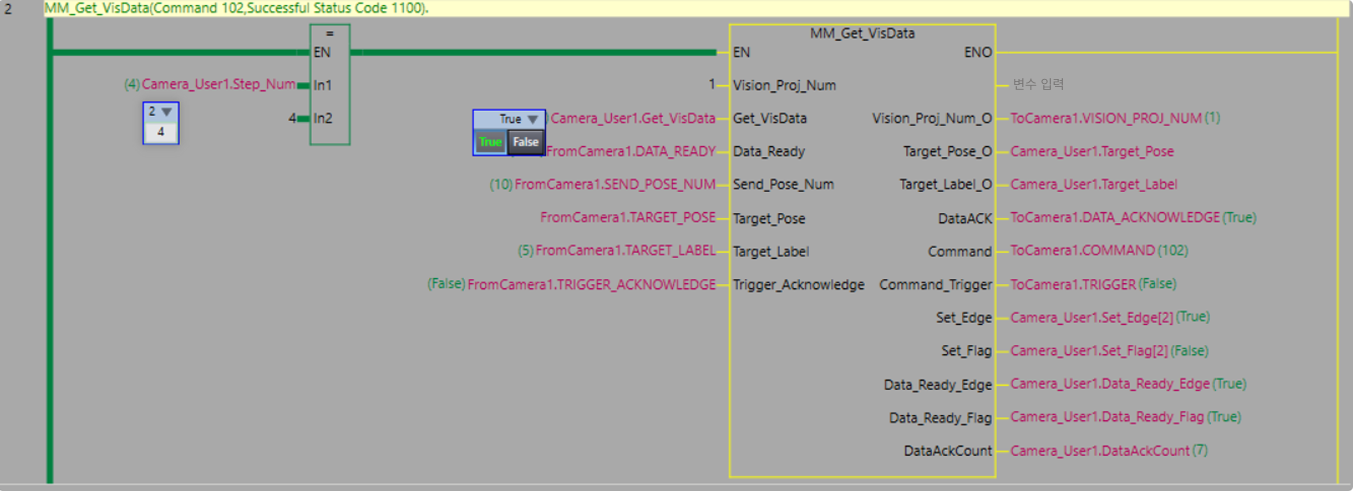
-
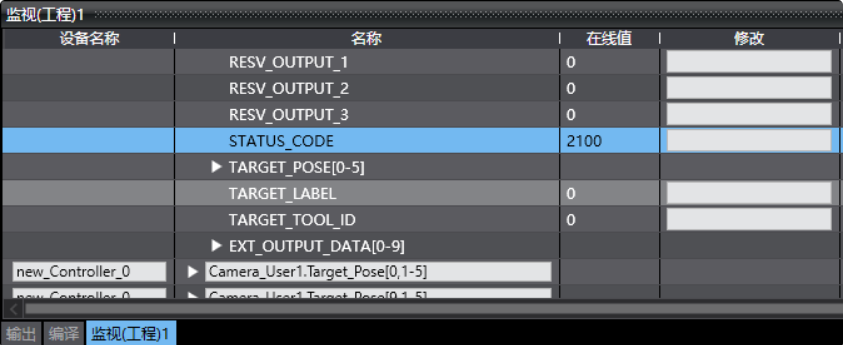
FromCamera1.STATUS_CODE반환값이 `1100`인지 확인합니다.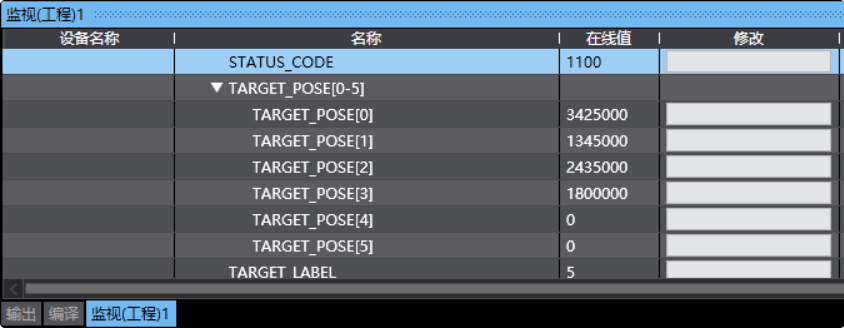
-
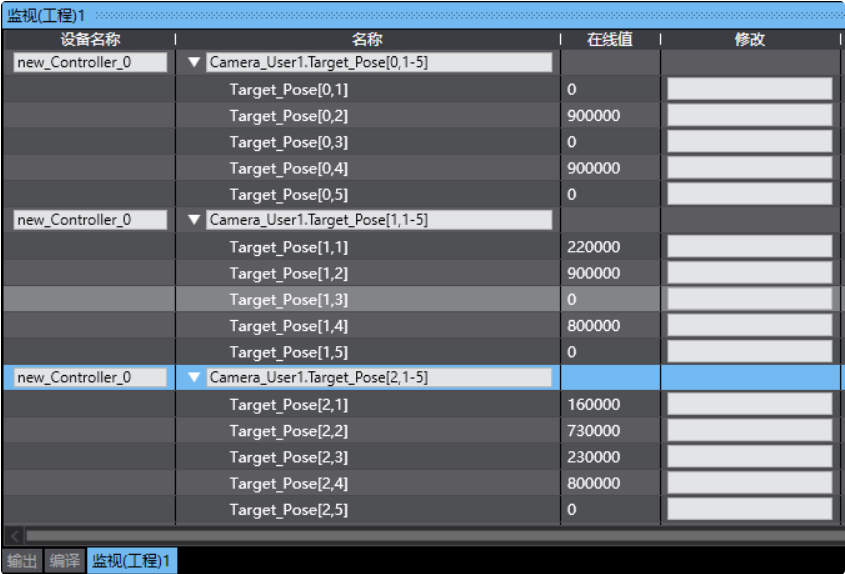
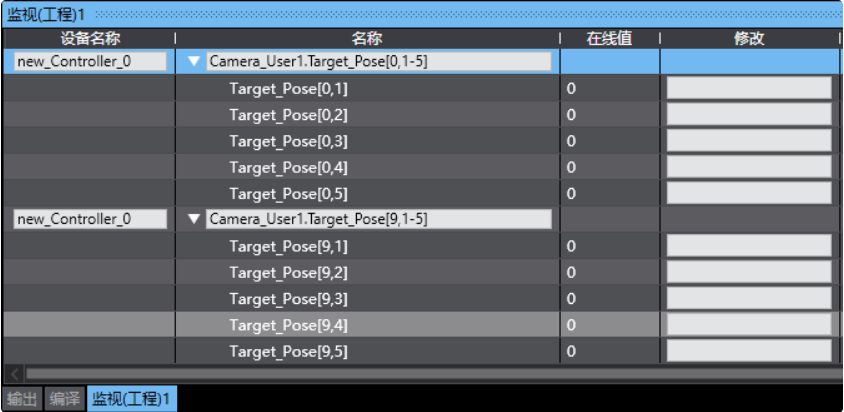
`SendPoseNum`은 반환된 포즈 개수를 나타내고, `Target_Pose`에 포즈 데이터가 저장됩니다(전달값은 실제값에 10000을 곱한 값).
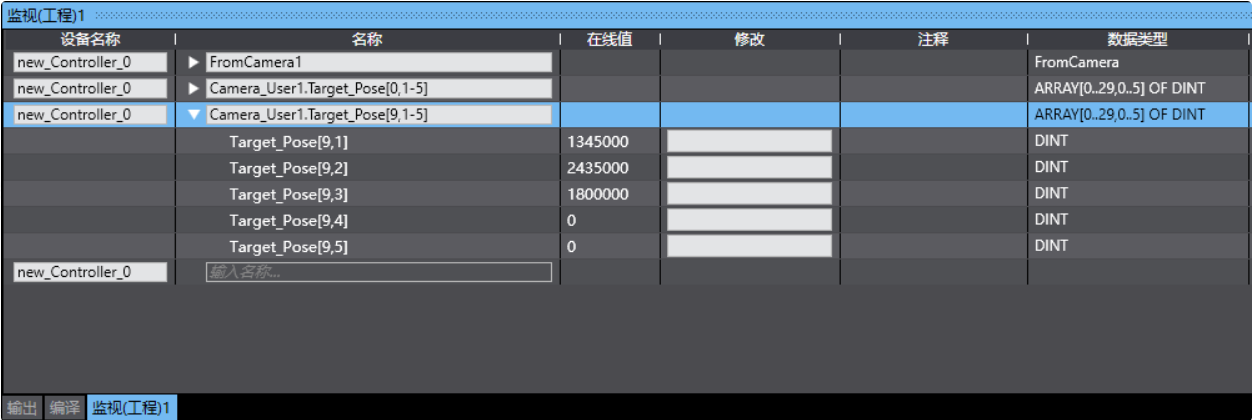
2차원 배열의 전체 데이터를 확인해야 하는 경우, 배열 인덱스 형식으로 모니터 창에 변수를 하나씩 추가할 수 있습니다.
Mech-Viz에서 계획 경로를 획득하기
파라미터 설정
-
소프트웨어 메인 창에서 “컨트롤러” / “오프라인”을 클릭하여 PLC 프로젝트를 오프라인 상태로 전환합니다.
-
이전 비전 결과를 비우도록 설정합니다(
MM_Empty_Target트리거).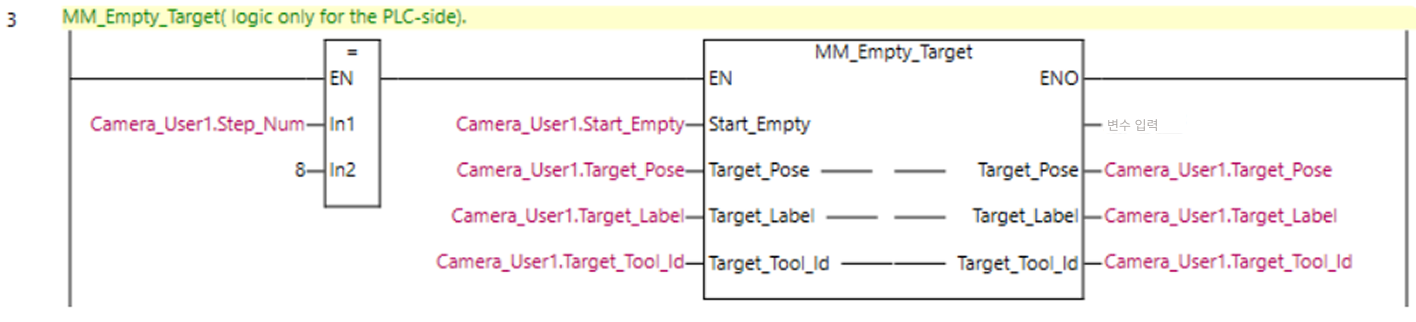
-
Viz 프로젝트 실행 관련 변수를 설정합니다.
-
분기 파라미터를 설정합니다:
BranchName=1,BranchPort=1.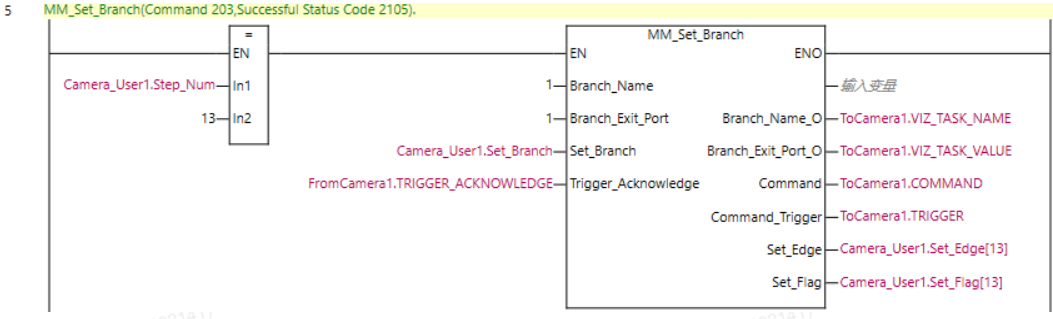
-
`REQ_POSE_TYPE=1`로 설정합니다. 이는 관절 각도 데이터를 반환함을 의미합니다.
프로그램 작성은 `MM_OMRON_NJ_NX_Lib_Project.smc2`의 비전 시스템 수동 모드 샘플을 참조할 수 있습니다.
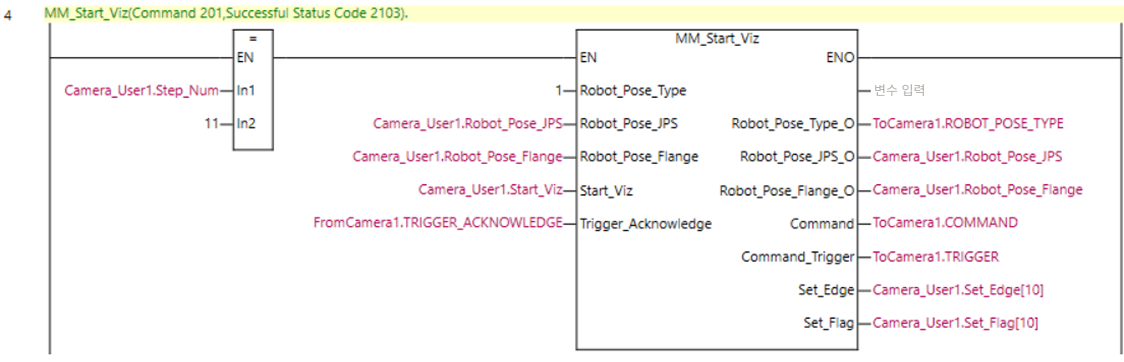
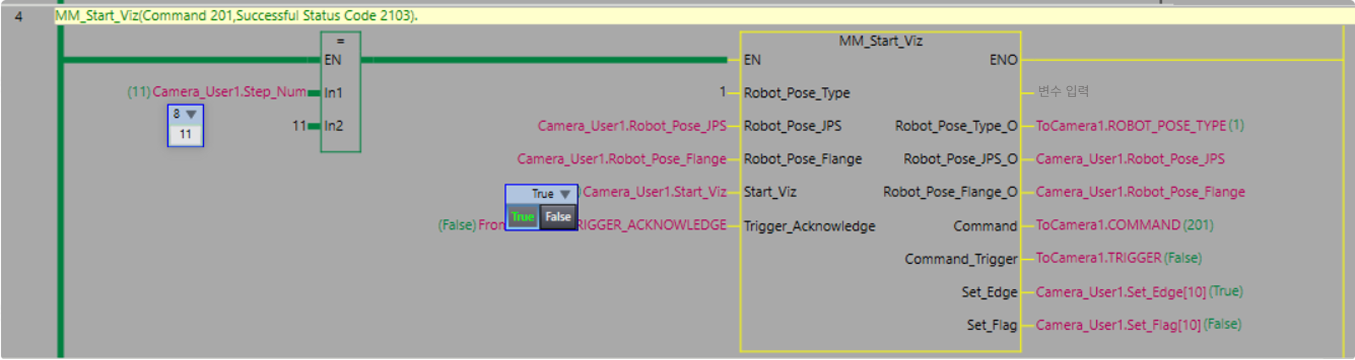
Mech-Viz 프로젝트 실행을 트리거하기
-
PLC 프로젝트를 다운로드하고 온라인으로 전환합니다.
-
`MM_Empty_Target`을 트리거하여 결과를 비웁니다.

-
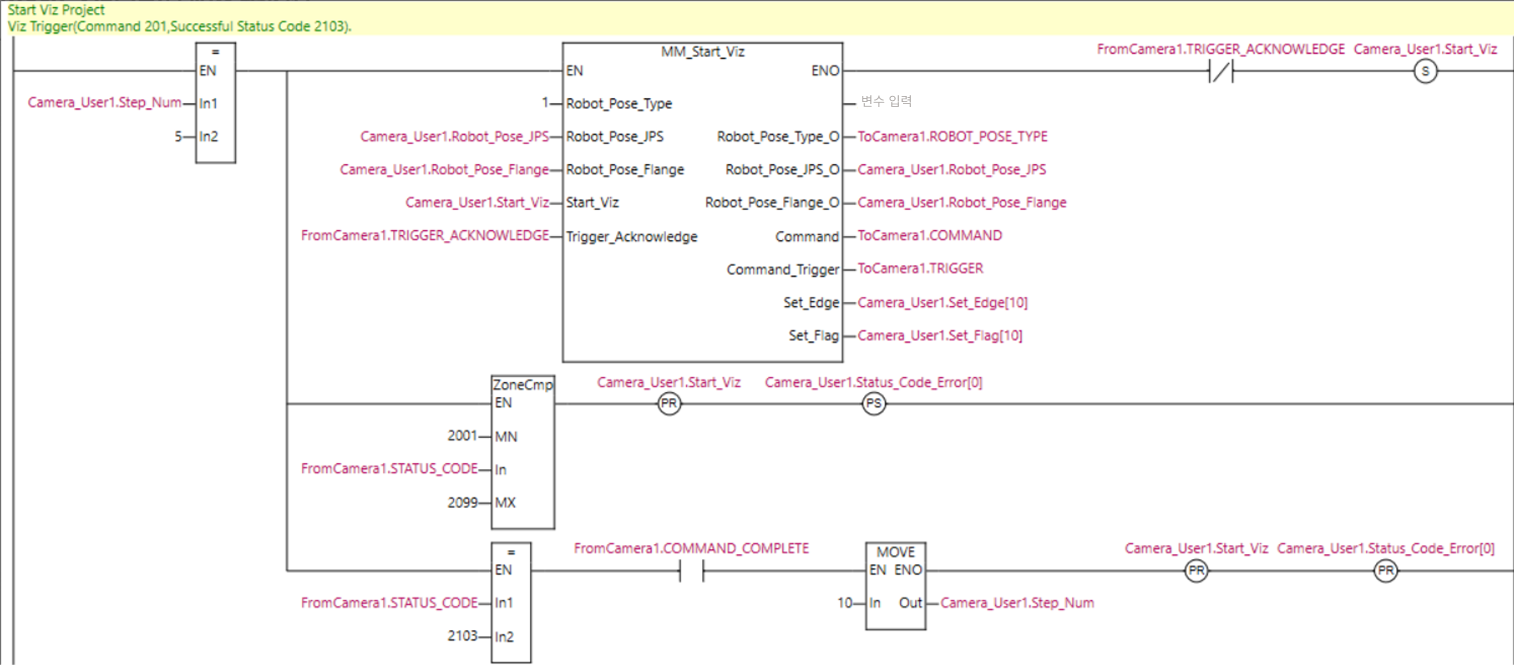
`MM_Start_Viz`를 트리거하여 Mech-Viz 프로젝트를 시작합니다.
-
FromCamera1.STATUS_CODE반환값이 `2103`인지 확인합니다. `20XX`이면 표준 인터페이스 상태 코드 및 오류 분석를 참조하여 점검합니다.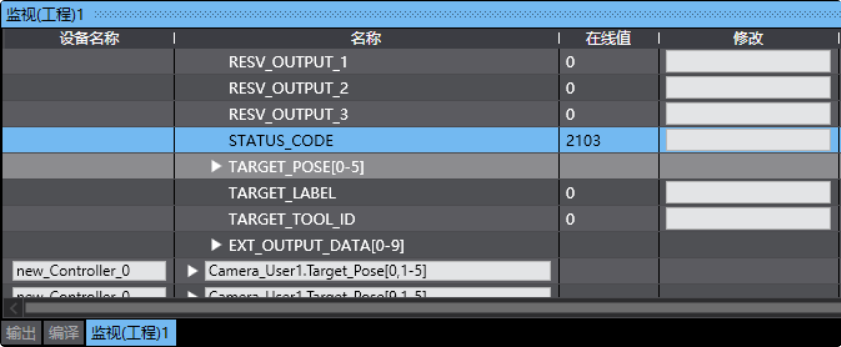
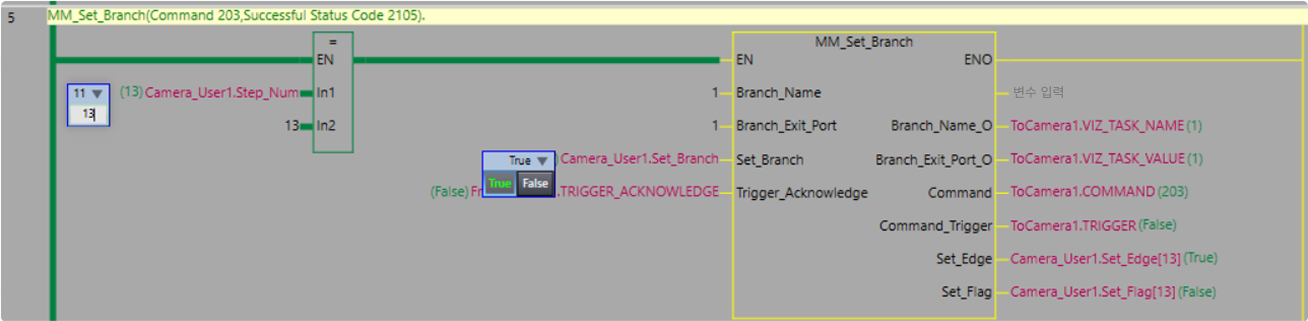
Mech-Viz 분기 아웃 포트를 설정하기
-
`MM_Set_Branch`를 트리거합니다(예: `Camera_User1.Set_Branch`를 `True`로 설정한 후 복원).
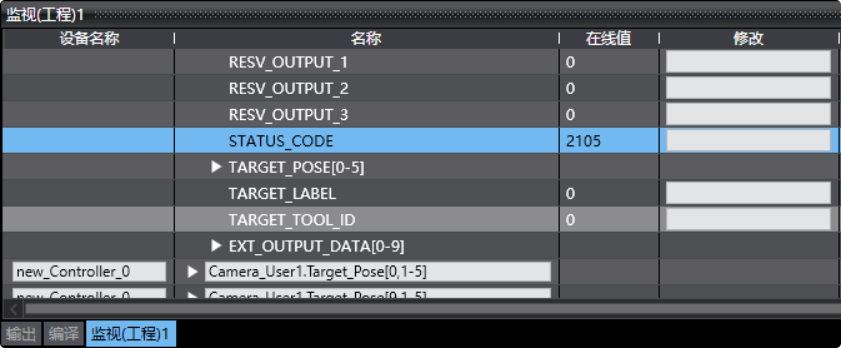
-
FromCamera1.STATUS_CODE반환값이 `2105`인지 확인합니다.