마스터 컨트롤 통신 구성(Elite CS)
이 부분에서는 Elite CS 로봇을 마스터 컨트롤하는 방법을 소개합니다.
사전 준비
하드웨어 및 소프트웨어 버전 확인
|
아래에 나열된 버전 및 모델은 테스트를 거쳐 사용할 수 있습니다. 다른 모델 및 버전은 본 문서를 참고하여 작업할 수 있으며, 문제가 발생하면 Mech-Mind 기술 지원팀에 문의하십시오. |
-
컨트롤러 모델: ERB1C2K0.
-
컨트롤러 버전: 2.8.0.
네트워크 연결 설정하기
-
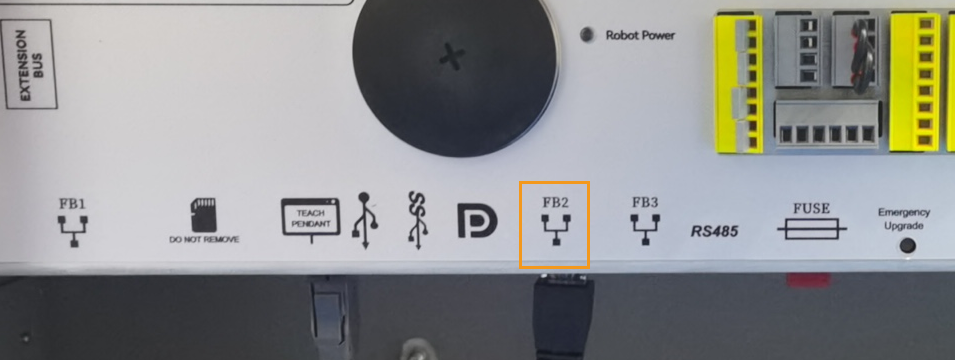
IPC의 네트워크 케이블의 다른 쪽 끝을 로봇 제어 캐비닛의 FB2 포트에 연결합니다.
-
로봇의 IP 주소가 IPC의 IP 주소와 동일한 네트워크 세그먼트에 있어야 합니다. 동일한 네트워크 세그먼트에 있지 않은 경우 IPC의 IP 주소를 수정하십시오.
사용 방법
-
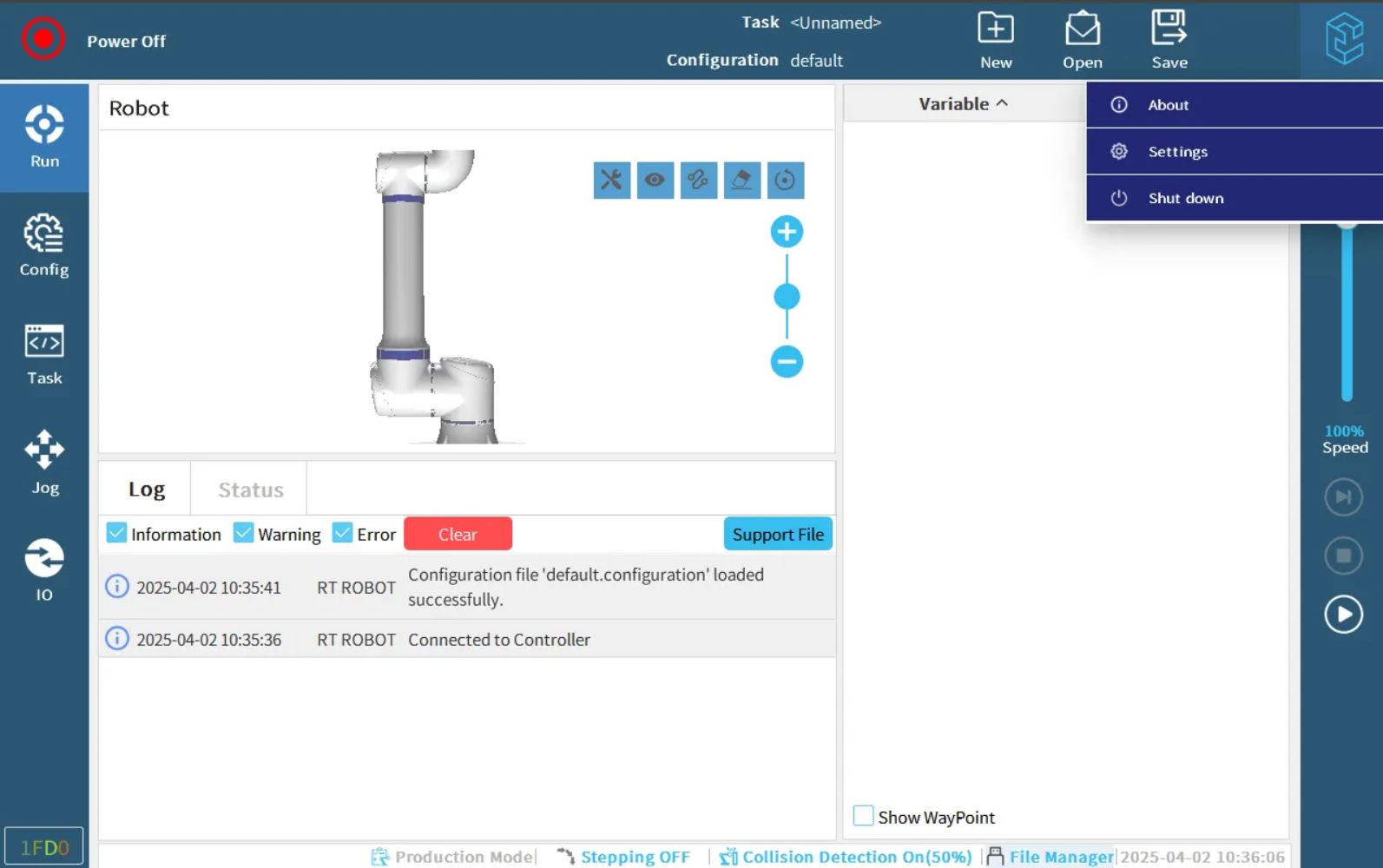
티치 펜던트에서 우측 상단의 Elite 로봇의 아이콘
 을 클릭하십시오. 드롭다운 메뉴에서 Settings를 클릭하십시오.
을 클릭하십시오. 드롭다운 메뉴에서 Settings를 클릭하십시오.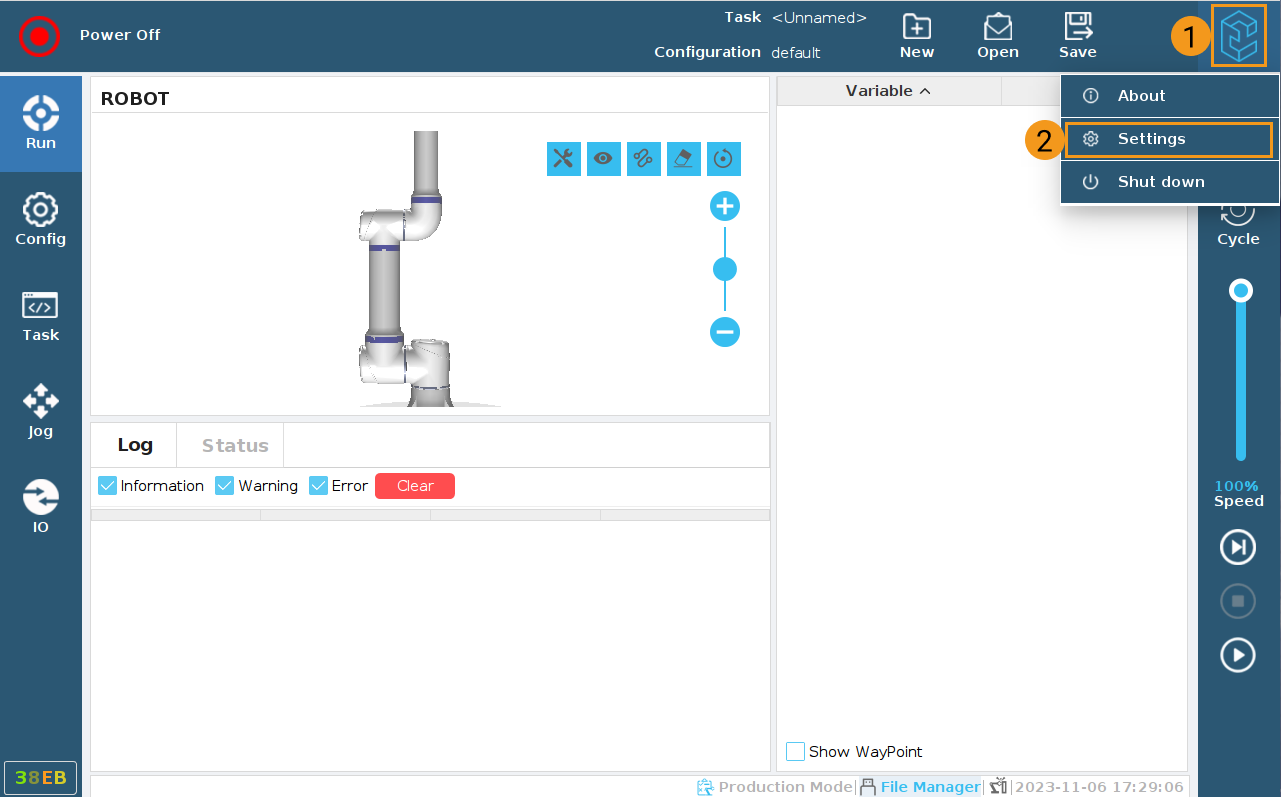
-
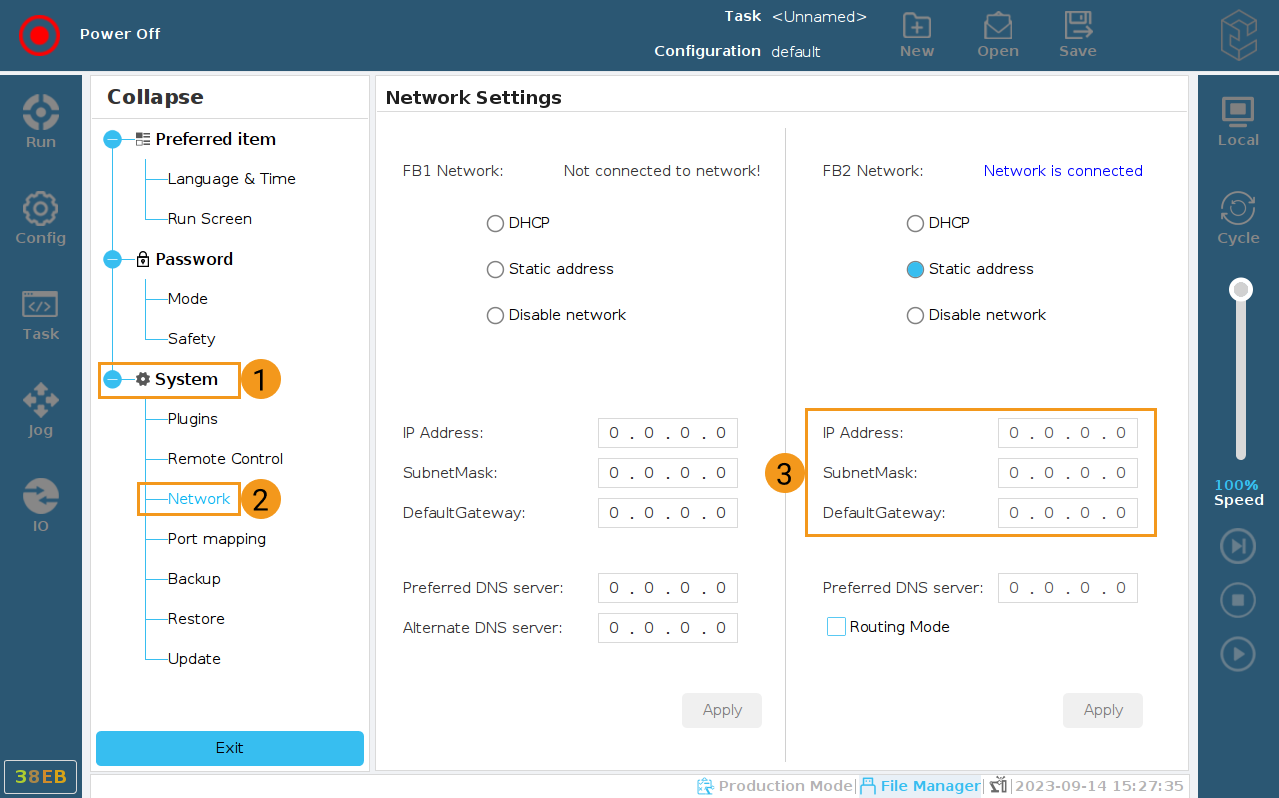
좌측 "Collapse" 패널에서 를 선택합니다. 우측 "Network Settings" 패널에서 로봇의 IP 주소가 IPC의 IP 주소와 동일한 네트워크 세그먼트에 있는지 확인하십시오.
-
동일한 네트워크 세그먼트에 있지 않은 경우 IPC의 IP 주소를 수정하십시오.
-
로봇 프로그램을 플래싱하기
플래싱 파일
-
USB를 티치 펜던트 또는 제어 캐비닛의 USB 인터페이스에 삽입하십시오.
-
하단 메시지 표시줄에서 File Manager를 클릭하십시오.
-
File Manager 창에서 우측 상단의 USB 아이콘
 을 클릭하여 USB 파일 디렉터리에 들어갑니다. 플래싱할 파일이 저장된 USB를 두 번 클릭합니다.
을 클릭하여 USB 파일 디렉터리에 들어갑니다. 플래싱할 파일이 저장된 USB를 두 번 클릭합니다.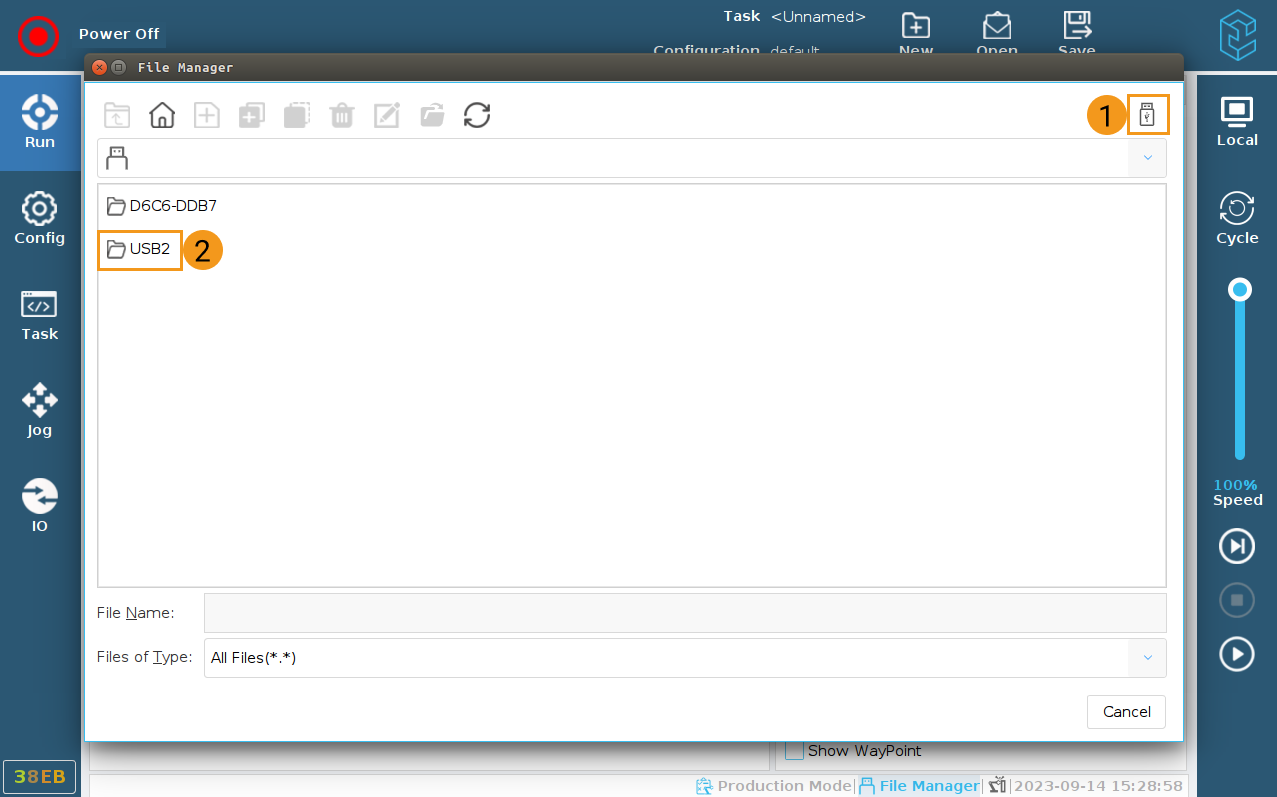
-
mm.task 파일을 선택하고 상단 작업 표시줄의 복사 버튼
 을 클릭합니다.
을 클릭합니다.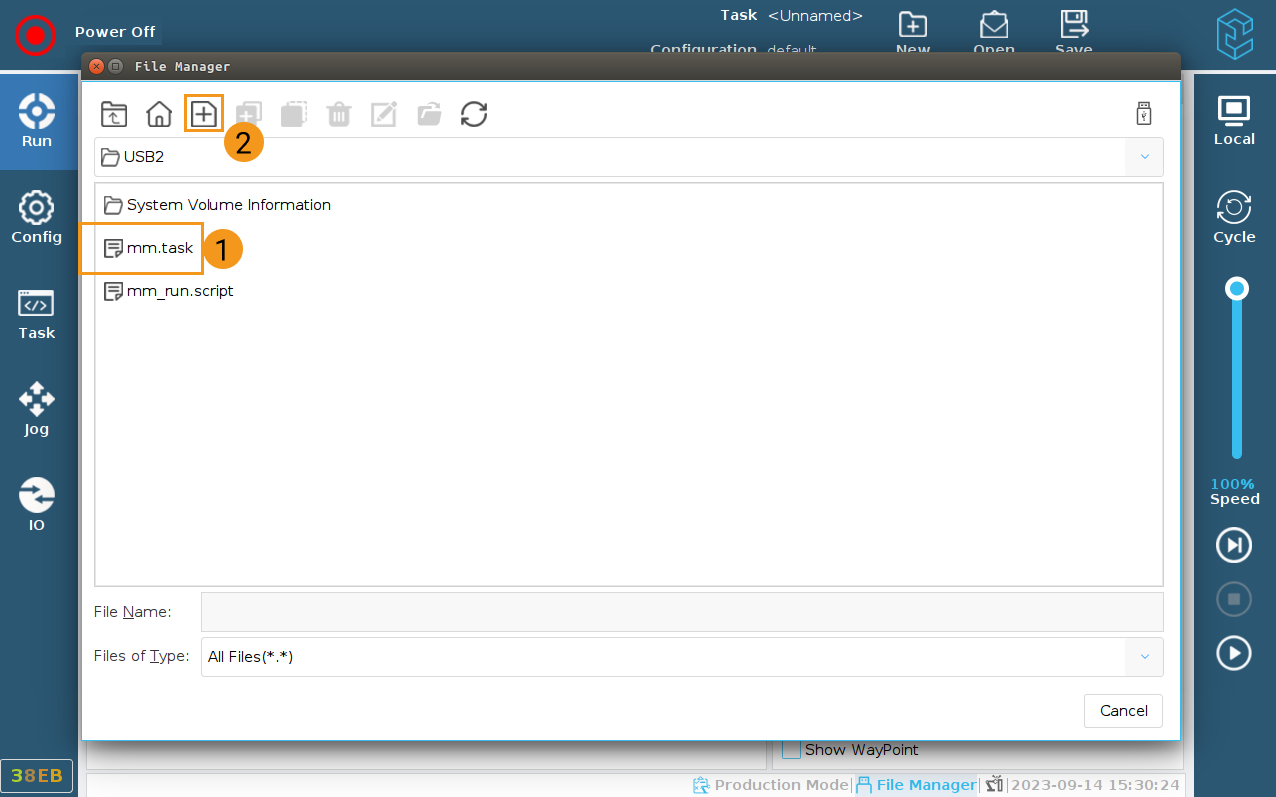
-
드롭다운 메뉴를 클릭하고 컴퓨터 아이콘
 을 선택하여 로컬 파일 디렉터리로 전환합니다.
을 선택하여 로컬 파일 디렉터리로 전환합니다.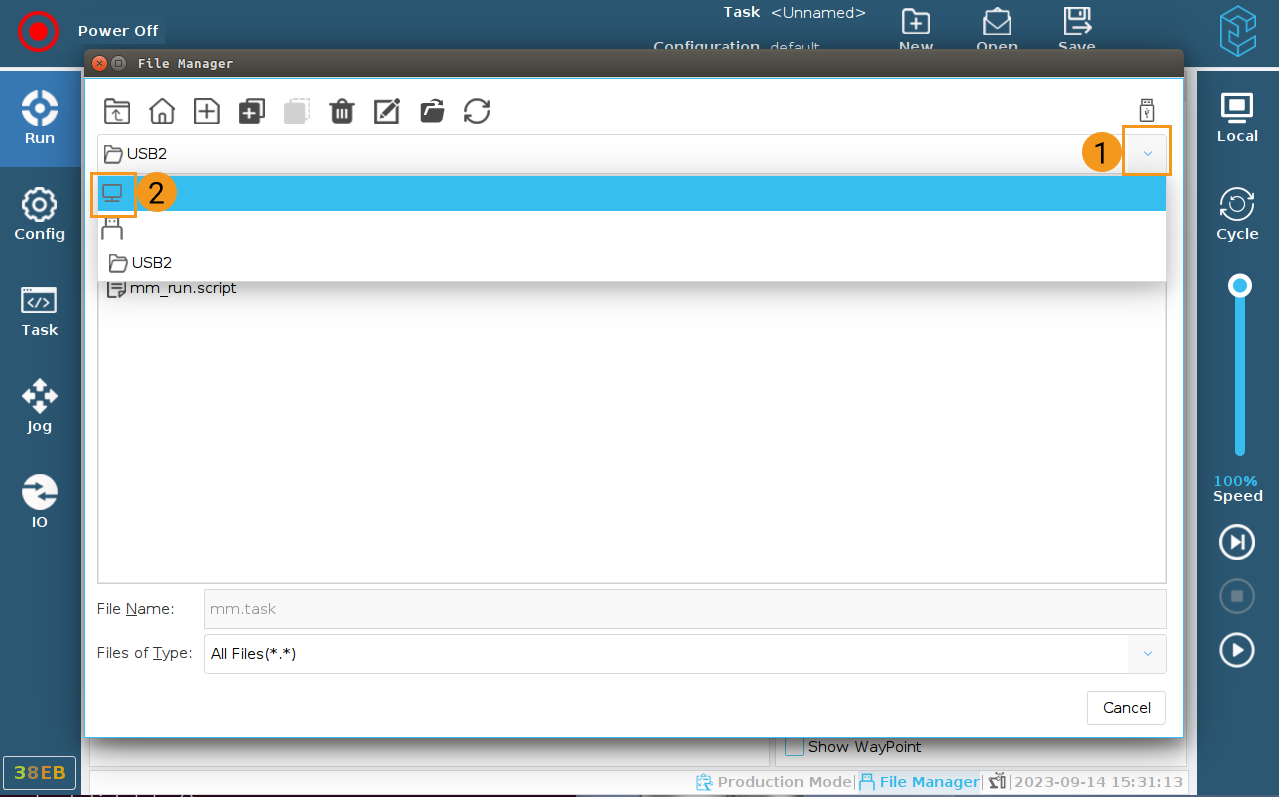
-
상단 작업 표시줄의 붙여넣기 아이콘
 을 클릭하여 mm.task를 로컬에 붙여넣습니다.
을 클릭하여 mm.task를 로컬에 붙여넣습니다. -
드롭다운 메뉴를 클릭하고 USB 아이콘을 선택하여 USB 디렉터리로 전환합니다. 4~6단계를 참고하여 mm_run.script를 로컬 파일 디렉터리에 복사합니다.
-
두 파일을 로컬 디렉터리에 복사한 후 Cancel을 클릭하여 파일 관리자를 종료합니다.
-
인터페이스 우측 상단의 ELITE 아이콘을 클릭하여 Settings를 선택합니다.
-
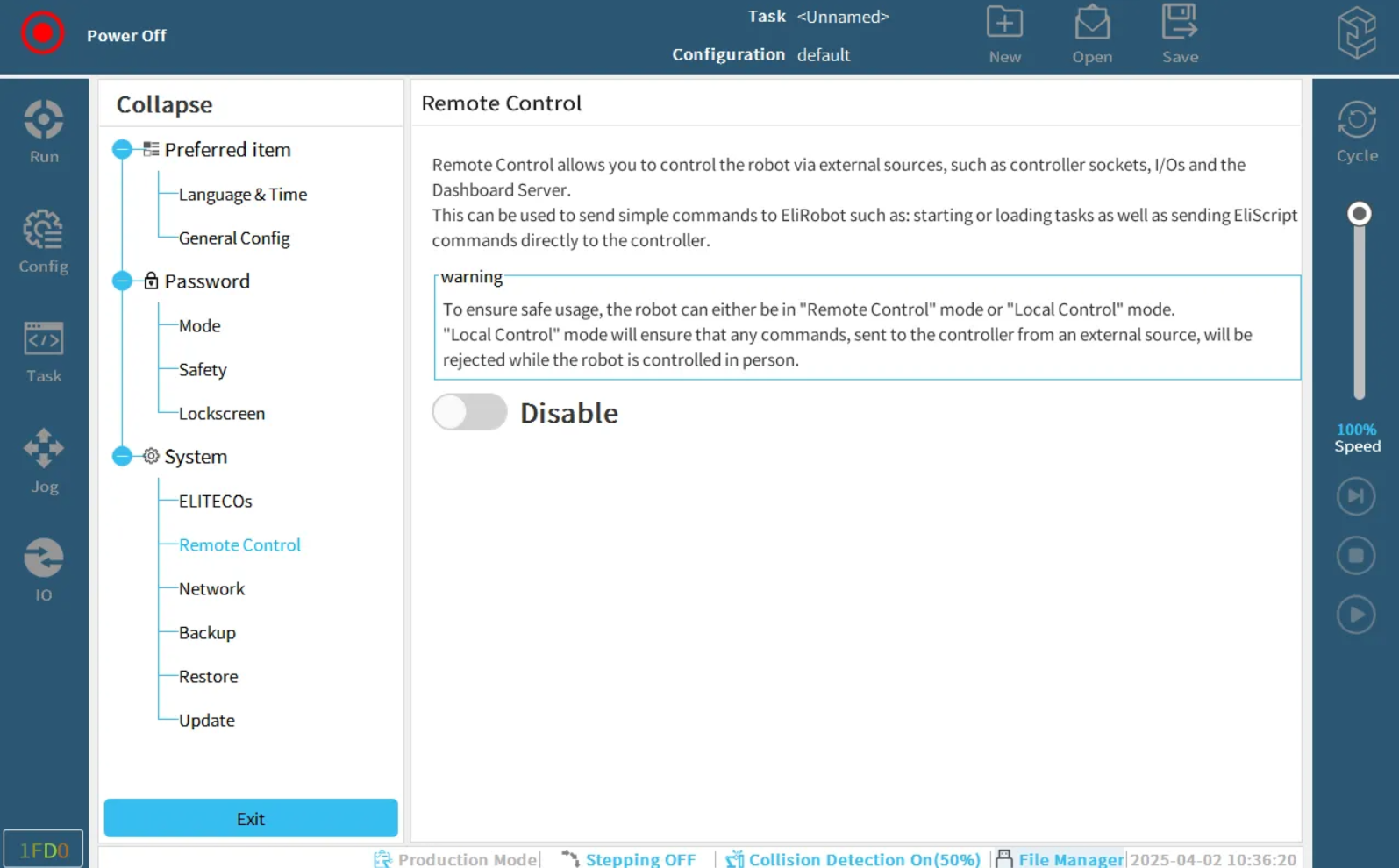
인터페이스 좌측에서 차례로 버튼을 클릭하고 우측의 원격 제어 스위치를 Disable 상태로 둡니다.
프로그램을 수정하기
플래싱을 완료한 후 작업 파일의 기본 IPC IP 주소를 실제 사용되는 IPC IP 주소로 수정해야 합니다.
-
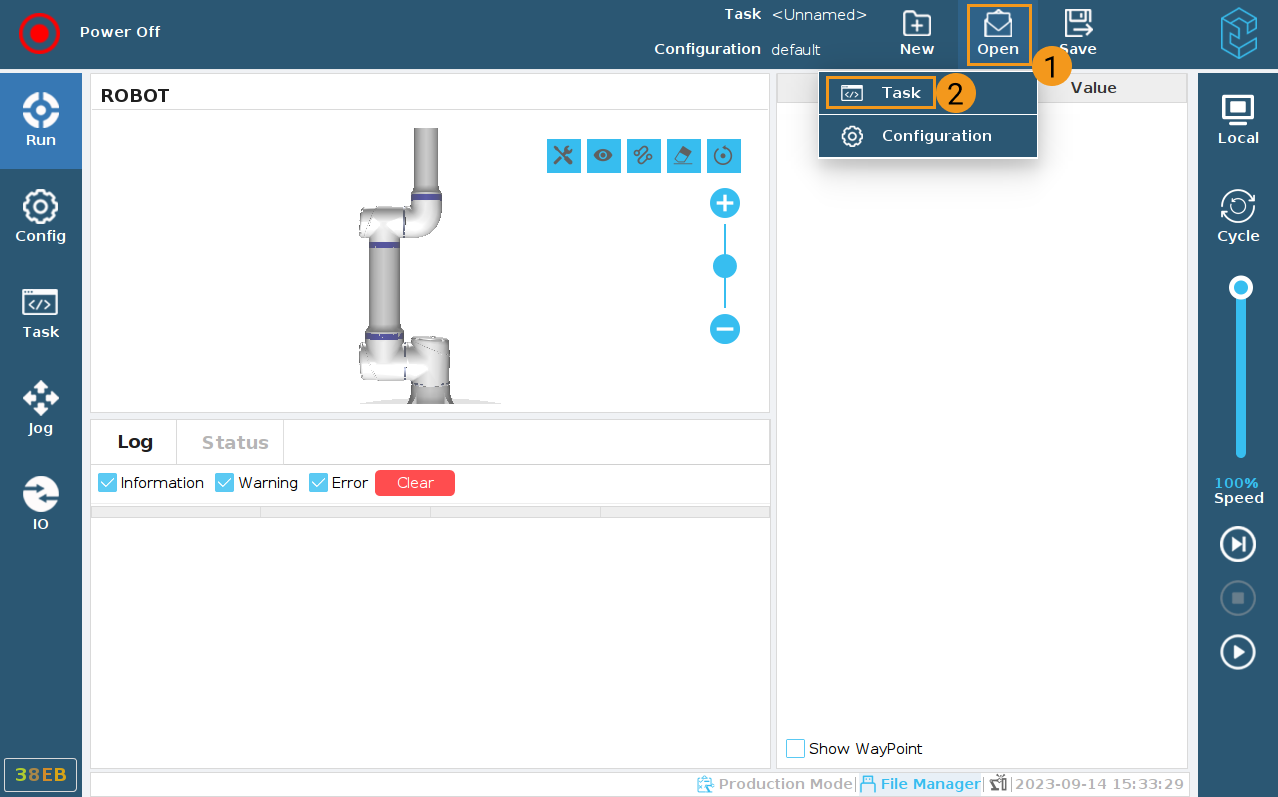
태스크 패널 상단의 Open을 클릭하여 드롭다운 메뉴에서 Task를 클릭합니다.
-
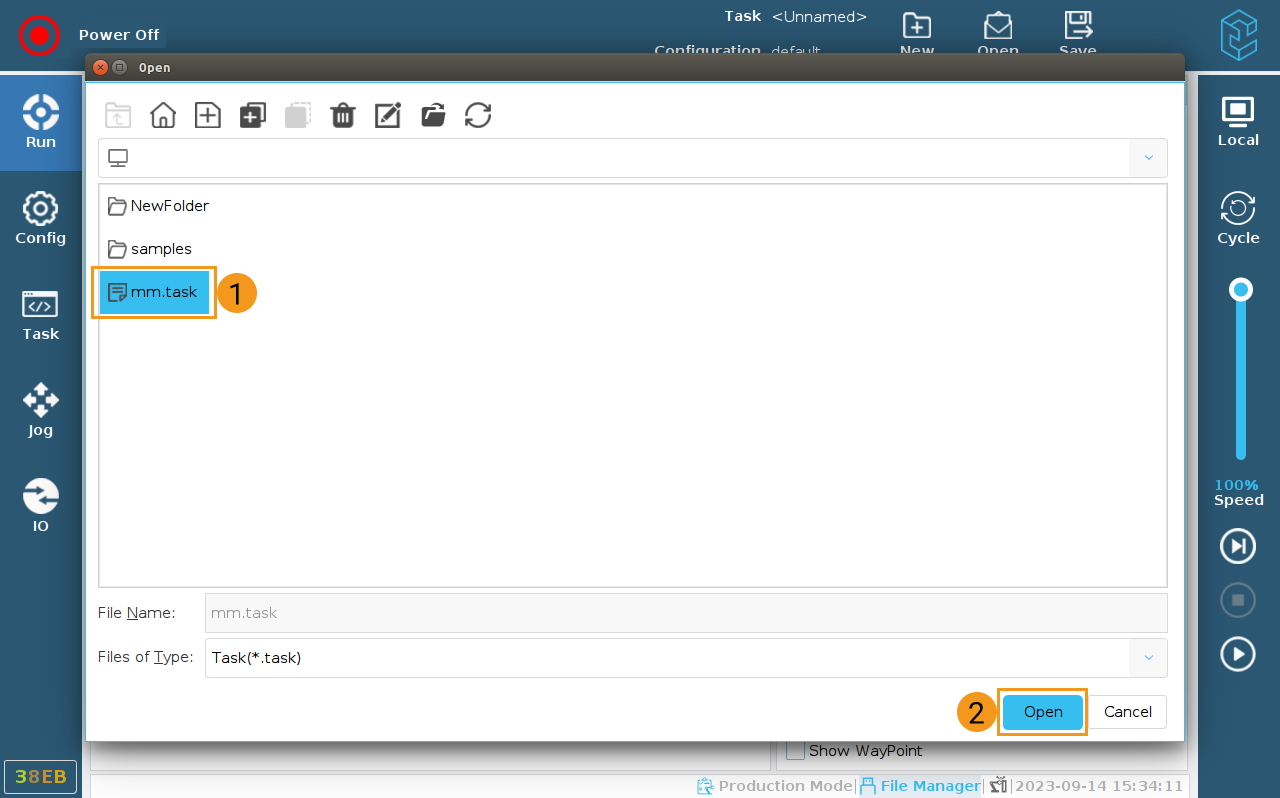
mm.task를 선택하고 Open을 클릭합니다.
-
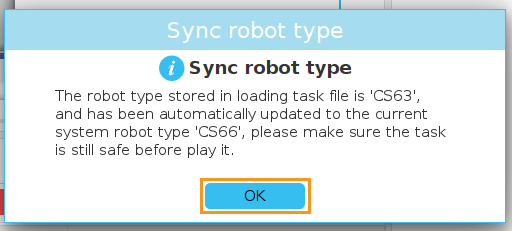
팝업된 대화 상자에서 OK 버튼을 클릭합니다.
-
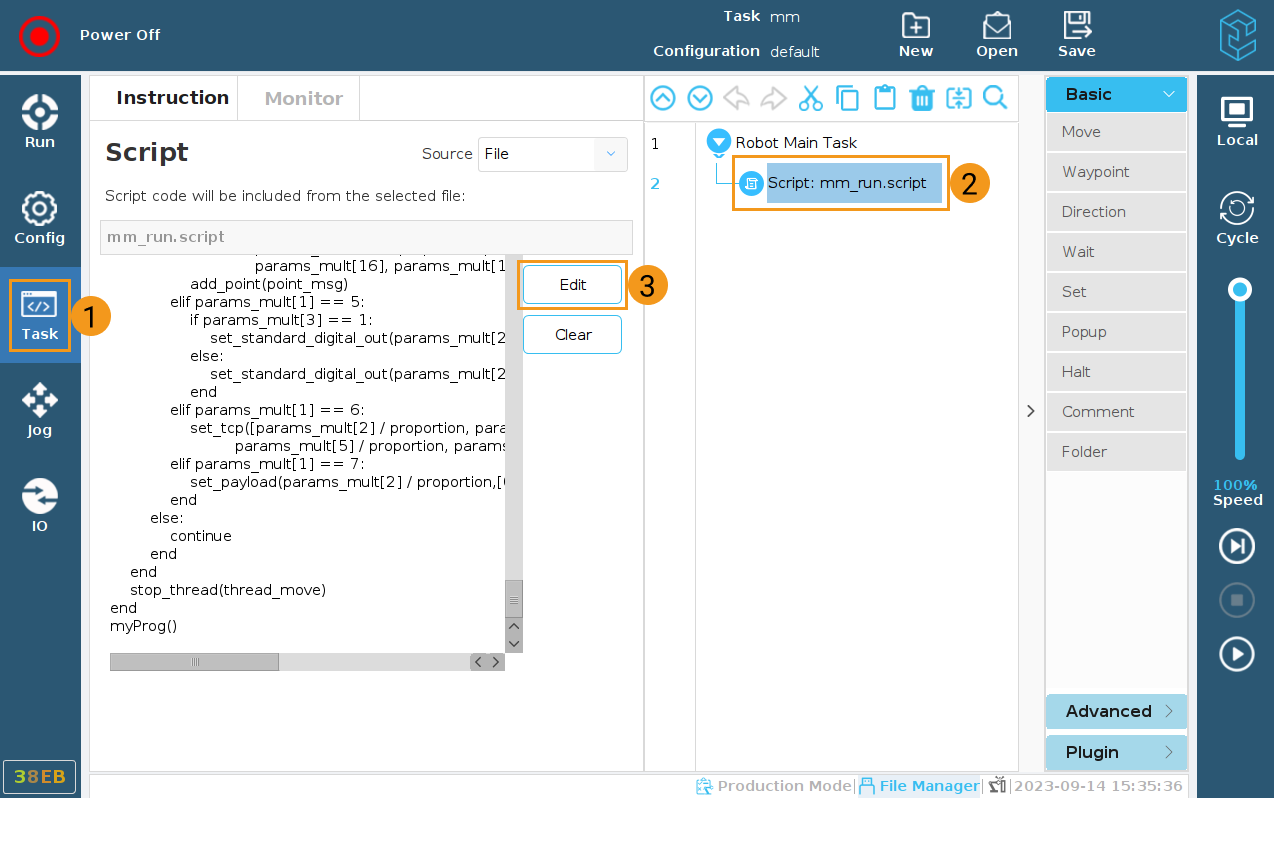
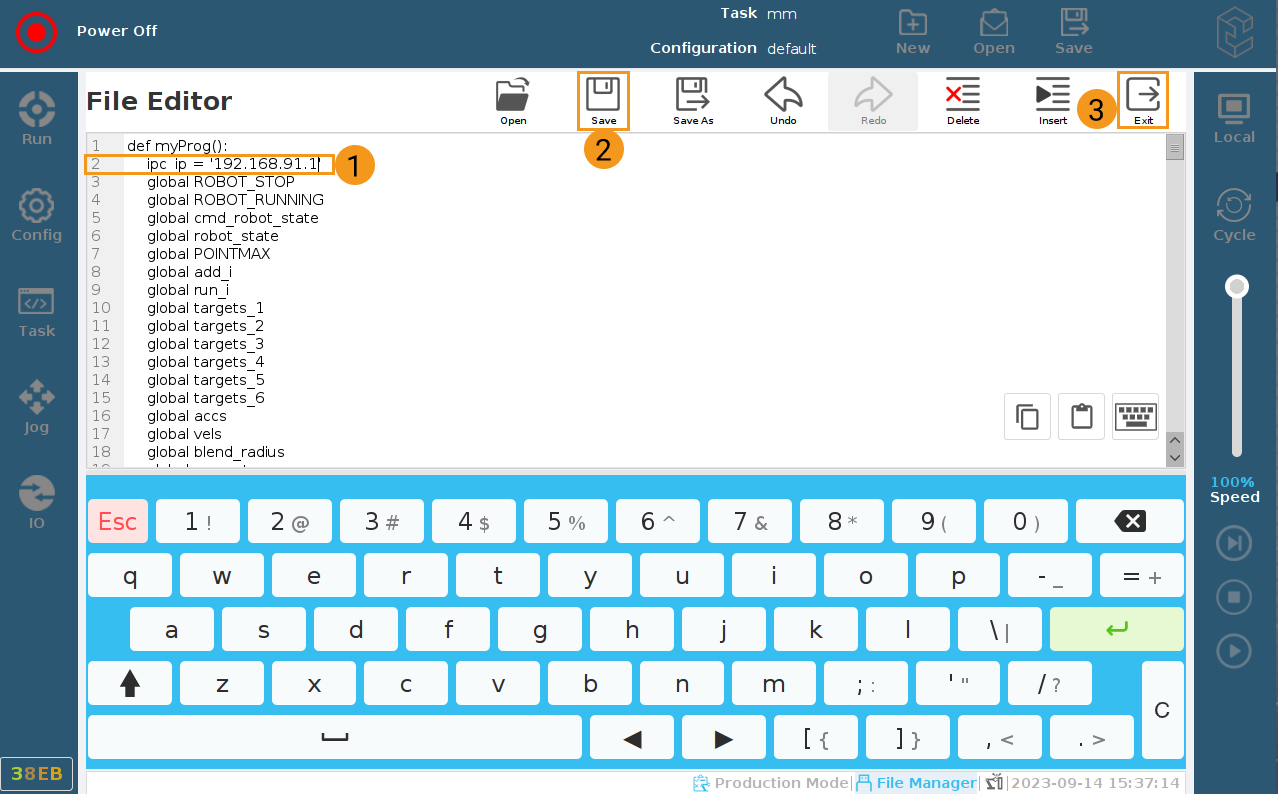
왼쪽 표시줄의 Task 옵션을 클릭합니다. 우측 패널에서 Script: mm_run.script를 선택합니다. 좌측 패널에서 Edit 버튼을 클릭합니다.
-
파일 편집기의 2번째 줄에서 ipc_ip를 찾은 후, ipc_ip 값을 IPC의 실제 IP 주소로 변경합니다. Save를 클릭한 다음 Exit를 클릭합니다.
마스터 컨트롤 통신 테스트
로봇을 실행하기
IPC의 IP 주소를 설정한 후, 로봇과 IPC 간의 마스터 컨트롤 연결 상태를 테스트하기 위해 로봇을 시작하고 실행해야 합니다.
-
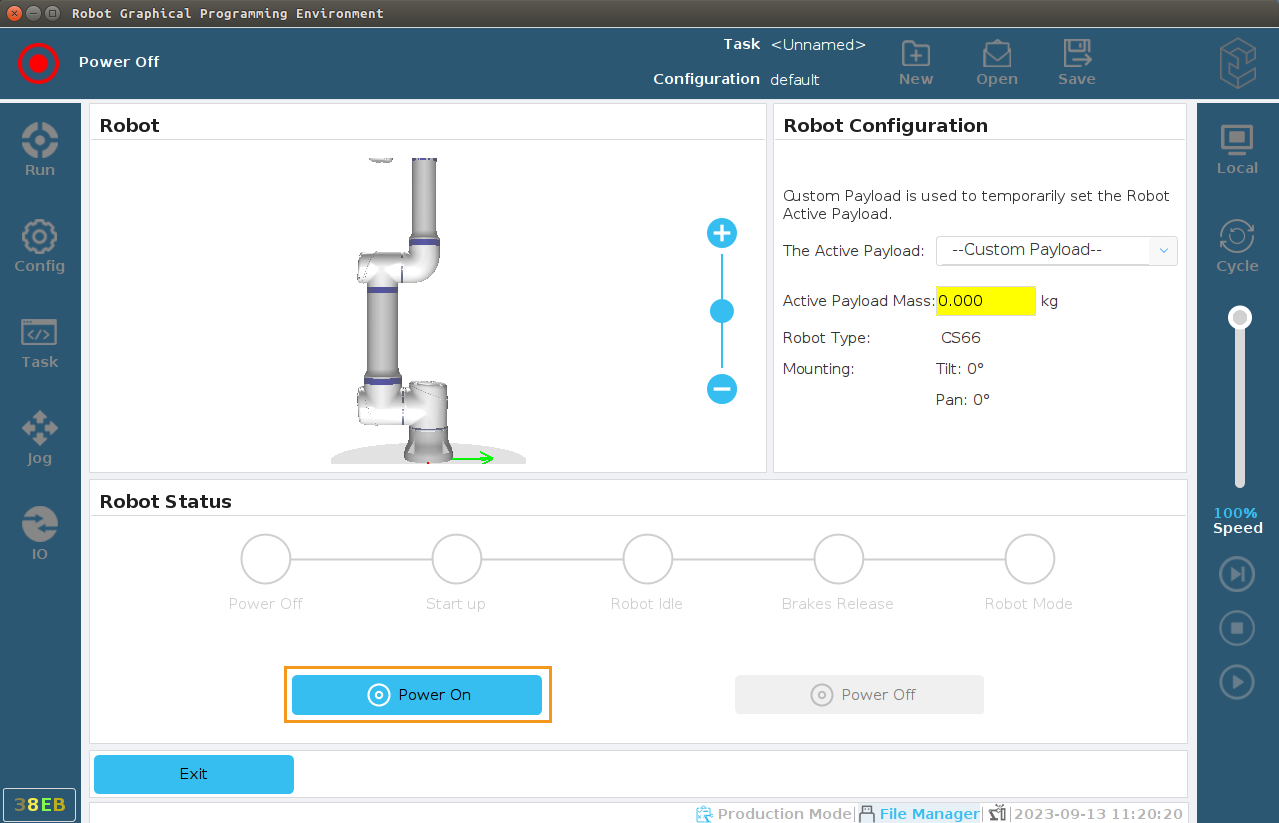
티치 펜던트에서 좌측 상단의 빨간색 "전원 끄기" 아이콘
 을 클릭합니다.
을 클릭합니다. -
Power On 버튼을 클릭합니다.
-
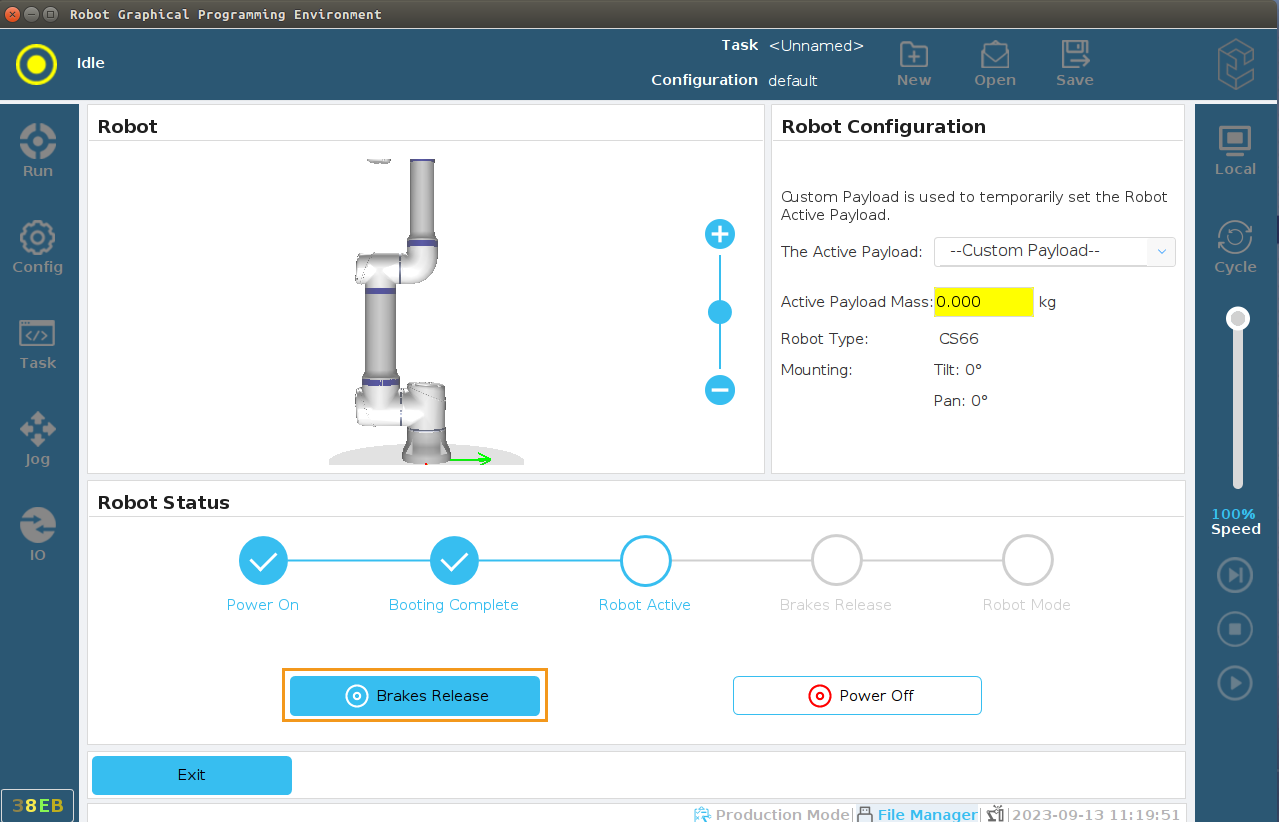
Brakes Release 버튼을 클릭합니다.
-
성공적으로 시작되면 좌측 상단의 전원 아이콘이 초록색으로 바뀝니다(
 ). Exit 버튼을 클릭합니다.
). Exit 버튼을 클릭합니다. -
우측 패널의 시작 아이콘
 을 클릭하면 로봇이 작동을 시작합니다.
을 클릭하면 로봇이 작동을 시작합니다.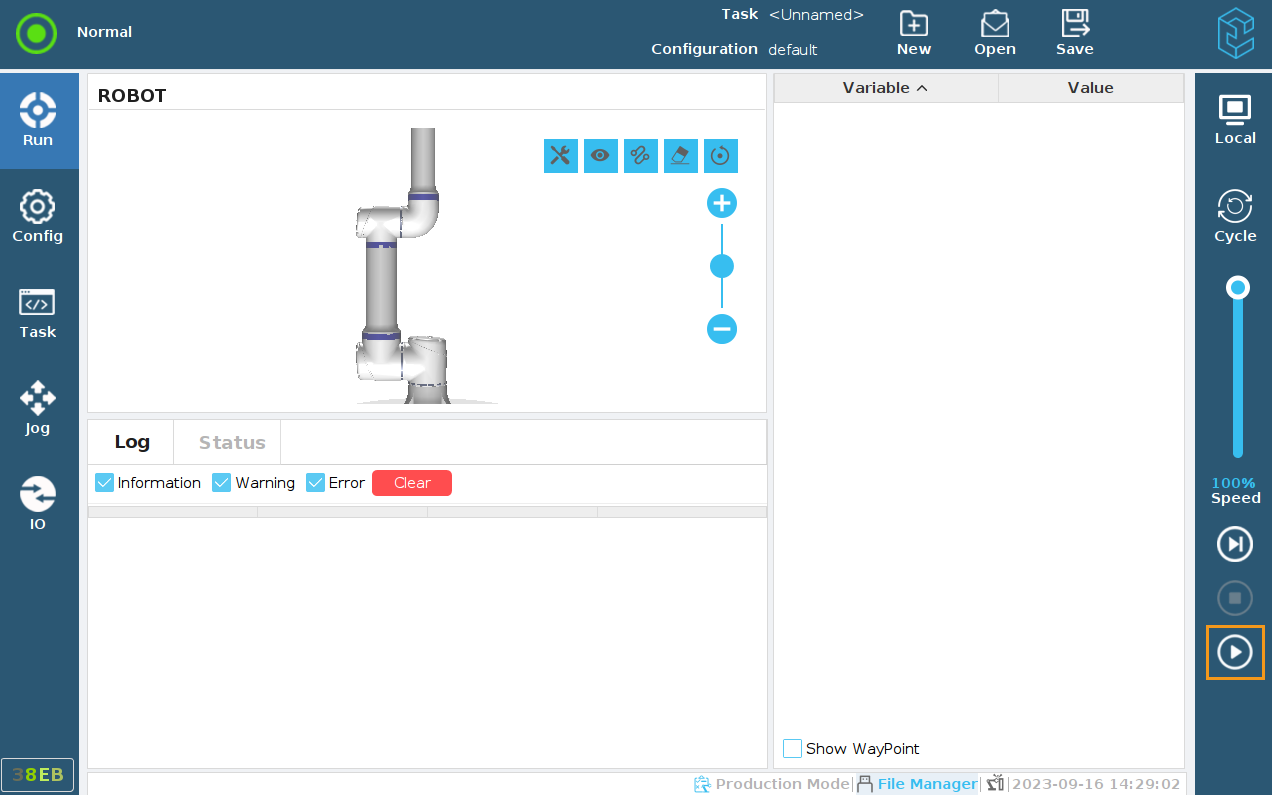
Mech-Viz 프로젝트 생성
-
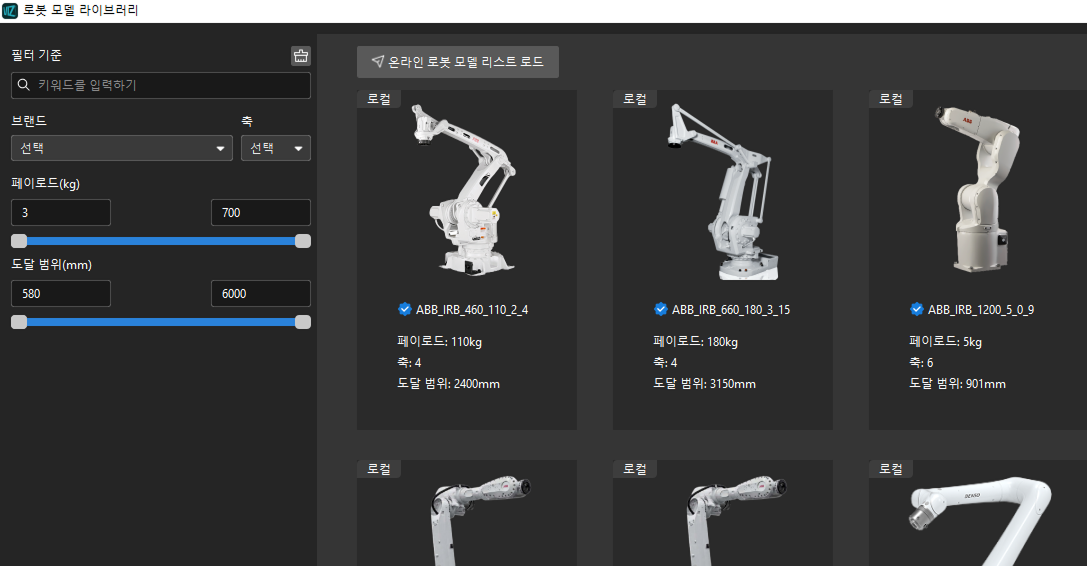
Mech-Viz 소프트웨어를 열고 키보드에서 Ctrl + N (프로젝트 새로 만들기)를 누릅니다. 다음 인터페이스에서 실제 로봇의 브랜드와 모델에 따라 해당 로봇 모델을 선택합니다.
-
키보드에 있는 Ctrl + S 버튼을 눌러 프로젝트를 저장하는 데 사용되는 폴더를 새로 만들거나 선택하십시오.
-
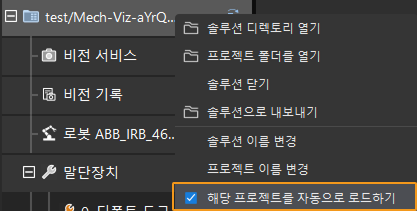
Mech-Viz 소프트웨어의 왼쪽 패널에서 프로젝트 이름을 마우스 오른쪽 버튼으로 클릭하고 *자동 로딩으로 설정*을 선택합니다.
로봇 연결
-
Mech-Viz 소프트웨어에서 도구 모음의 마스터 컨트롤로 로봇 연결 을 클릭합니다.
-
*로봇 IP 주소*에서 실제 로봇의 IP 주소(그림의 IP 주소는 예시임)를 입력하고 로봇 연결을 클릭합니다.
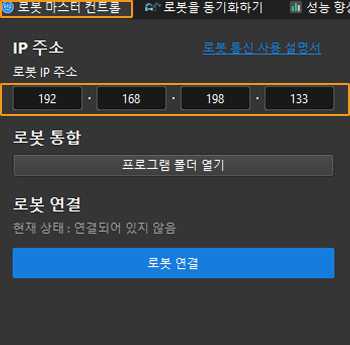
Mech-Viz가 실제 로봇과 성공적으로 연결되면 현재 상태가 *연결됨*으로 표시되며 도구 모음의 아이콘이 파란색에서 녹색으로 바뀝니다.

연결에 실패한 경우, 설정된 로봇 IP 주소가 잘못되었는지 확인하십시오.
로봇을 이동하기
-
Mech-Viz 소프트웨어에서 도구 모음의 속도와 가속도를 5%로 설정하십시오.

-
도구 모음에서 로봇 동기화 를 클릭하여 선택된 상태로 만들면 3D 시뮬레이션 공간의 가상 로봇 포즈가 실제 로봇 포즈로 동기화됩니다. 그런 다음 로봇 동기화 를 다시 클릭하여 선택을 취소합니다.

-
로봇 옵션에서 J1 관절 각도를 조금 조절합니다(예: 0°를 3°로 조절함). 이 작업은 가상 로봇을 이동시킵니다.

-
실제 로봇 이동을 클릭하여 실제 로봇의 이동 여부를 확인합니다. 실제 로봇이 가상 로봇의 포즈로 이동하면 마스터 컨트롤 통신이 정상임을 의미합니다.
로봇을 실행할 때 안전에 주의하십시오. 비상시에는 티치 펜던트의 비상정지 버튼을 누르십시오. 