Detect and Measure Circle
Function
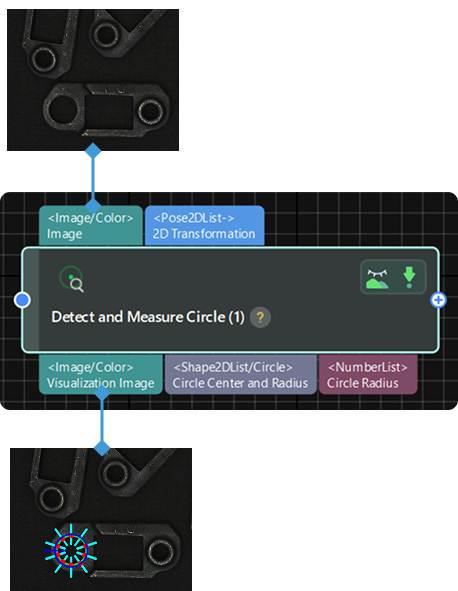
This Step is used to detect and measure circles in the input image.
|
Before using this Step, enable the step_measure2d option under in the menu bar. Only then can the operation be performed. |
Usage Scenario
This Step is used to detect the pixel-wise positions and radii of circles in images to prepare for subsequent calculation of physical dimensions in measurement scenarios.
Parameter Description
| Parameter | Description |
|---|---|
ROI |
Description: This parameter is used to specify the region of interest (ROI), which limits the detection and measurement range of a circle. Instruction: The procedure for using this Step is as follows.
|
Position and Orientation Correction |
Description: This parameter is used to adjust the position and orientation of the ROI according to the input 2D transformation.
|
Number of Edge Detection Frames |
Parameter description: This parameter is used to set the number of edge detection frames generated within the set ROI. Object edge points used for fitting will be generated within each edge detection frame. The larger the value, the denser the edge point sampling and the higher the fitting accuracy; however, this also increases the computational load. If the value is too small, edge details may be lost.
|
Grayscale Change Lower Threshold |
Description: This Step is used to set the lower threshold of the grayscale change of the point in the edge detection frames.
|
Edge Detection Frame Half Width |
Description: This parameter is used to set the half width of the edge detection frame.
|
Sigma of Gaussian Filter |
Description: This parameter is used to filter the image vertically within the edge detection frames.
|
Edge Polarity Type |
Description: This parameter is used to specify which type of grayscale change will be considered as object edge points. The grayscale change is defined as the grayscale change vertically from top to bottom in an edge detection frame. Value list: White To Black, Black To White, Both
Default value: Both |
Edge Selection |
Description: This parameter is used to select edge points detected within the edge detection frame for fitting the complete edge. Value list: First, Second, Last, All
Default value: First |
Edge Detection Frame Half Height |
Description: This parameter is used to set the half height of the edge detection frame.
|
Fitting Method |
Description: This parameter is used to specify the type of algorithm for circle fitting. Value list: Least Squares, Huber
Default setting: Huber |
Visualization Settings
| Parameter | Description |
|---|---|
Draw ROI |
Parameter description: This parameter is used to determine whether to display the detection region and orientation on the image. It is used to indicate the path and orientation for generating the edge detection frames. The detection region is a circle drawn with the shorter side of the manually selected rectangular ROI as its diameter; the detection direction line is an arrowed line segment aligned horizontally with the circle’s center.
|
Draw Edge Detection Frames |
Description: This parameter is used to determine whether to display the edge detection frames used for extracting edge points on the image. Edge detection frames are generated from the center of the circular detection region and evenly spaced along the circumference to extract grayscale changes within these frames.
|
Draw Edge Points |
Description: This parameter is used to determine whether to display the object edge points used for fitting on the image. Object edge points are detected through grayscale changes in the edge detection frames.
|
Draw Detected Circle |
Description: This parameter is used to determine whether to display the detected circle in the ROI on the image.
|