目标类型
目标类型说明
工具位姿 |
路径点将以工具坐标系的 X、Y、Z 值 + 欧拉角、四元数或旋转矢量表示。 工具位姿是工具坐标系相对于机器人基坐标系的位姿描述。这种描述方式更贴近任务空间,侧重于描述机器人执行任务时末端工具(如机械手爪、焊枪等)的位置和朝向。 |
关节角 |
路径点将以机器人每个关节的数值表示。 关节角是机器人的各个关节相对于其初始位置或基准位置的旋转角度。这种描述方式更贴近机器人的硬件结构,表示每个关节的状态。 |
工件位姿 |
路径点将以物体坐标系的 X、Y、Z 值 + 欧拉角、四元数或旋转矢量表示。这种描述方式侧重于描述机器人执行任务时需要操作或处理的实际工作对象的位置和朝向。 工件位姿是工件上某一点相对于机器人坐标系的位姿。 |
| 当目标类型为工件位姿时,请勿在Mech-Vision中使用位姿调整类步骤调整抓取点,否则可能导致抓取不准确。 |
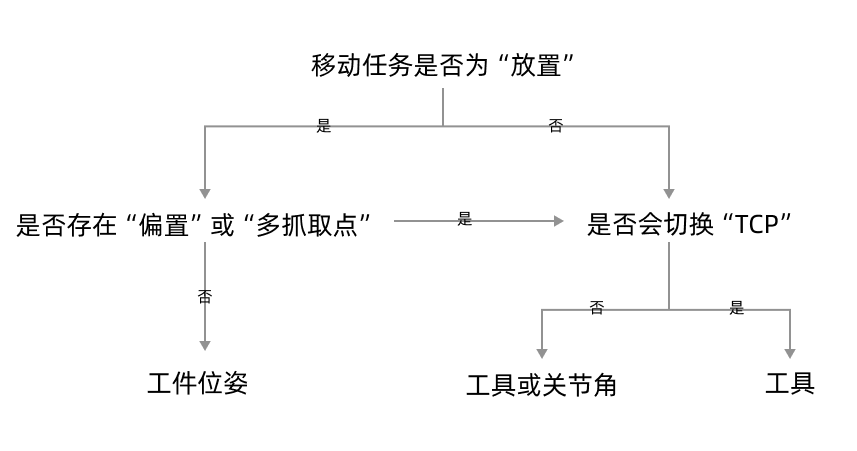
选择目标类型的判断方式如下图所示。
参数说明
编辑位姿 |
直接编辑位姿,可复制和粘贴,支持四元数和欧拉角两种格式。 |
变换位姿 |
通过定义变换的方式将当前位姿变换到新位姿,适用于微调位姿的场景。 |
校准位姿 |
用法类似机器人三点法计算工件坐标系,适用于物体旋转姿态不好确定的场景;比如长方体倾斜时,旋转位姿很难确定,可使用校准位姿计算出长方体旋转姿态,让机器人按照计算出的姿态运行。 |
编辑关节角 |
与编辑位姿用法类似,可复制和粘贴,支持弧度和角度两种格式。 |
|
获取当前仿真机器人的位姿。 |
|
移动仿真机器人到当前设置的位姿。 |
|
列出所有可能的关节角解。 |


