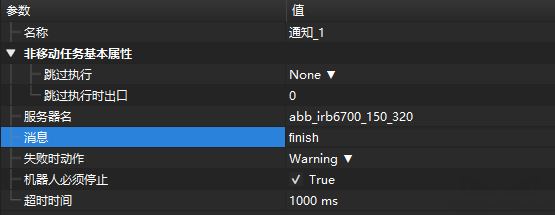
通知 您正在查看V1.8.2版本的文档。如果您想查阅其他版本的文档,可以点击页面右上角“切换版本”按钮进行切换。 ■ 如果您想使用最新版本,可以从梅卡曼德下载中心下载。 ■ 如果您不确定当前使用的产品是哪个版本,请随时联系梅卡曼德技术支持。 功能描述 向外部服务发送自定义通知。 使用场景 需外部设备通信时,使用此步骤。 参数说明 接收对象 根据实际接收 DO 信号的对象设置此参数。可选择机器人、标准接口或Adapter(选择 Adapter 还需要填写“Adapter服务名称”)。此外,接收对象可多选。 若未设置此参数,DO信号将无法由软件传输到接收对象。 Adapter 服务名称 Adapter 通过 服务名称 获取此步骤的信息。工程若有多个 通知 步骤, 所有通知步骤需使用相同的 服务名称。 消息 自定义信息。Adapter 按照消息内容执行不同逻辑,如分支运行结束,消息设置为 finish 。 失败时动作 说明:通知消息未成功发送出时,软件做出的处理。 值: Warning:报警(默认值)。 Retry:重试。 Throw:丢弃步骤。 机器人必须停止 勾选后,机器人运行至此步骤时会停顿。取消勾选机器人将边运行边发送消息。 超时时间 超过此时间消息未发出(单位 ms),机器人执行 失败时动作。 应用示例 设置 服务名称,将规划失败后消息发送给 Adapter,失败信息为 finish 。 该页面是否有帮助? 我要反馈 感谢您的支持! 可以通过以下方式反馈意见: 社区 反馈表单 转移控制权 分类