主控连接机器人
入口:软件主界面 > 工具栏 > 主控连接机器人。
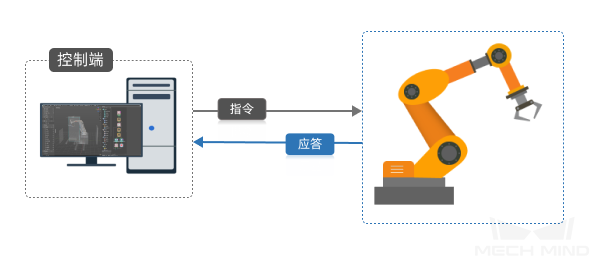
主控机器人指通过烧录监控程序,Mech-Viz 与机器人组成主从通信/控制模型。Mech-Viz 作为主控设备发送指令,机器人作为受控设备,按照主控设备的指令进行作业。
执行以下步骤完成机器人的主控连接:
-
确认当前工程中所选机器人模型型号与实际机器人型号一致。机器人模型型号可在工程资源树中的机器人一栏查看。
-
参照 主控通信 完成主控程序烧录以及主控通信配置(若已完成配置,请跳过此步)。
-
在机器人端启动主控程序。
-
单击工具栏的 主控连接机器人。
-
输入机器人IP地址。
-
单击 连接机器人。
-
确认机器人主控连接是否成功。
若当前状态显示已连接,则机器人连接成功。此时单击 同步机器人 ,仿真机器人将同步真实机器人的位姿。
若无法成功连接机器人,可从以下几点进行排查:
-
机器人模型型号与实际机器人型号是否一致。
-
机器人IP地址是否填写正确。
-
在机器人侧是否完成了主控程序烧录。
-