평행이동 허용 편차
이 부분에서는 픽 포인트를 기반으로 한 평행이동 허용 편차를 소개합니다.
소개
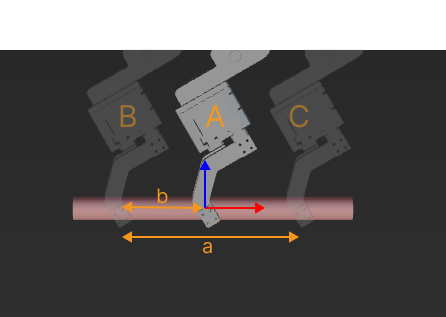
일부 픽 포인트를 기반으로 피킹할 때, 말단장치의 피킹 포즈가 픽 포인트의 X축 또는 Y축을 따라 일정한 범위로 평행이동할 수 있습니다. 이 범위는 “평행이동 허용 편차”라고 부릅니다. 평행이동 허용 편차를 설정함으로써 로봇은 이러한 "허용 가능한 편차"를 적극적으로 활용하여 충돌과 같은 문제를 피할 수 있습니다.
이 부분에서는 픽 포인트를 기반으로 한 평행이동 허용 편차를 소개합니다.
일부 픽 포인트를 기반으로 피킹할 때, 말단장치의 피킹 포즈가 픽 포인트의 X축 또는 Y축을 따라 일정한 범위로 평행이동할 수 있습니다. 이 범위는 “평행이동 허용 편차”라고 부릅니다. 평행이동 허용 편차를 설정함으로써 로봇은 이러한 "허용 가능한 편차"를 적극적으로 활용하여 충돌과 같은 문제를 피할 수 있습니다.