캘리브레이션 구 사용 설명(ETH)
이 부분에서 ETH 비전 시스템의 정확도 드리프트 자동 보정 시 캘리브레이션 구 사용 방법을 설명합니다.
패키지 리스트
다음 표를 참조하세요.
|
| 번호 | 부속품 | 예시 그림 |
|---|---|---|
1 |
직경 60 mm의 캘리브레이션 구 * 1 |
|
2 |
소프트노즐 에어블로워 * 1 |
|
3 |
|
|
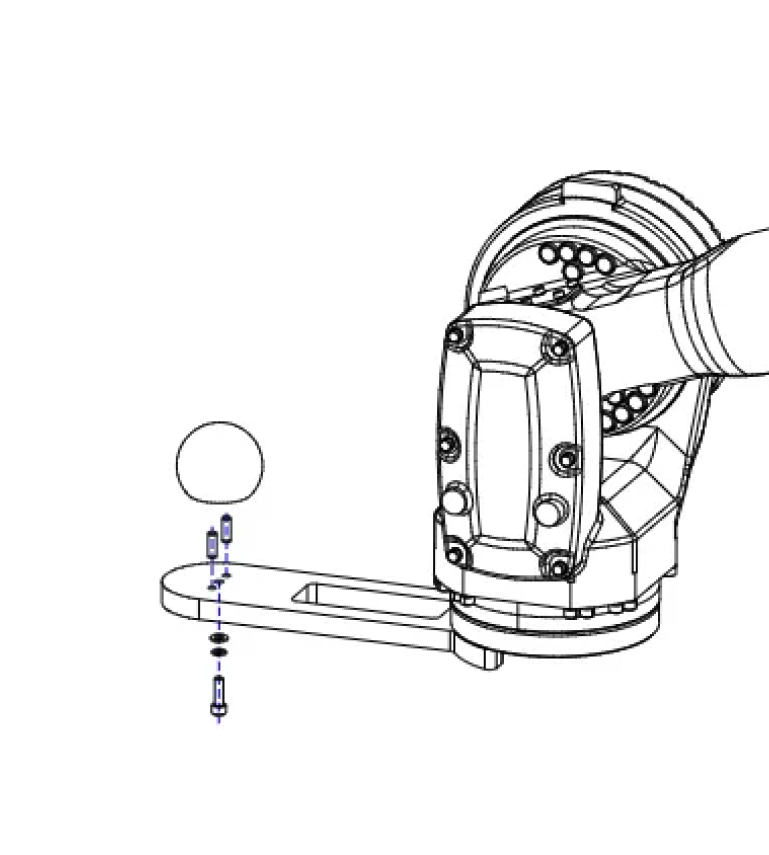
장착 도면
아래 그림과 같이 볼트와 위치 지정 핀을 사용하여 로봇 끝부분에 캘리브레이션 구를 장착합니다(견고한 그리퍼나 플랜지 커넥터 등).
캘리브레이션 구를 설치할 때 다음과 같은 요구 사항에 주의하세요.
-
설치 전
-
캘리브레이션 구를 만질 때 반드시 방진 장갑을 껴야 합니다.
-
-
설치 시
-
카메라로 이미지를 캡처할 때 캘리브레이션 구가 가려지지 않도록 주의하세요.
-
캘리브레이션 구가 가능한 한 많은 위치에 도달할 수 있는지 확인하세요.
-
크거나 긴 그리퍼를 갖춘 로봇이 캘리브레이션 구의 이미지 캡처 포인트 위치로 이동할 때 캘리브레이션 구 근처의 물체와 그리퍼 사이의 충돌을 피하기 위해 특별한 주의를 기울여야 합니다.
-
-
설치 후
-
캘리브레이션 구를 장착한 후 볼트, 핀, 접촉 표면에 마커를 표시합니다.
-
유지 보수
캘리브레이션 구의 포즈를 수집하기 전에 다음 검사를 최소한 한 번 수행해야 합니다.
느슨함 점검 & 처리
점검
-
캘리브레이션 구 표면을 자세히 관찰하여 눈에 보이는 긁힘, 움푹 패임, 얼룩 또는 기타 물리적 손상이 있는지 확인합니다.
-
각 캘리브레이션 구의 설치 볼트에 있는 고정 표시(일반적으로 페인트 라인 또는 마크)를 확인하여 다음 문제들이 있는지 점검합니다:
-
표시가 여전히 선명하게 보이는지.
-
표시가 틀어지거나 손상되어 볼트가 느슨해졌는지 여부.
-
|
이상이 발견되면 기록하고 관련 담당자에게 보고하여 처리해야 합니다. |
처리
캘리브레이션 구가 느슨하거나 변위된 것으로 확인되면 다음 단계를 따르세요.
-
캘리브레이션 구를 단단히 고정하고, 느슨함의 원인을 점검하여 문제를 해결합니다.
-
로봇 자동 보정 프로그램을 실행하여 캘리브레이션 구 포즈를 다시 수집하고 드리프트 보정 데이터를 생성합니다.
-
로봇이 모든 대상 물체를 정확하게 피킹할 수 있는지 테스트합니다.
-
로봇이 모든 대상 물체를 정확하게 피킹할 수 있으면 그 작업은 완료됩니다.
-
로봇이 모든 대상 물체를 정확하게 피킹할 수 없으면 정확도 드리프트 자동 보정 기능을 다시 배포해야 합니다.
그러나 재배포하기 전에 로봇이 드리프트 자동 보정 기능 없이 대상 물체를 정확하게 피킹할 수 있는지 여부를 확인해야 합니다.
이때 정확도 드리프트 자동 보정 기능을 일시적으로 비활성화해야 합니다. 즉, 비전 프로젝트의 '출력' 또는 '경로 계획' 스텝에서 '비전 시스템의 정확도 드리프트 자동 보정' 파라미터를 선택 취소한 다음, 로봇은 대상 물체를 정확하게 피킹할 수 있는지 여부를 테스트해야 합니다.
-
로봇이 모든 대상 물체를 정확하게 피킹할 수 있으면 정확도 드리프트 자동 보정 기능만 다시 배포하면 됩니다.
-
로봇이 모든 대상 물체를 정확하게 피킹할 수 없으면, 먼저 로봇의 대상 물체 피킹 정확도가 정상인지 확인한 후(예: 로봇을 조깅하여 픽 포인트를 다시 추가함) 드리프트 자동 보정 기능을 다시 배포해야 합니다.
-
-
먼지 검사 & 처리
캘리브레이션 구 표면에 먼지가 있는지 확인하고, 먼지가 있을 경우 아래의 절차에 따라 캘리브레이션 구를 청소하세요.
-
준비 작업: 방진 장갑을 착용하여 피부가 캘리브레이션 구 표면에 직접 닿지 않도록 합니다. 이는 지문, 기름때 또는 기타 오염 물질이 남는 것을 방지하기 위함입니다.
-
캘리브레이션 구의 초기 청소: 소프트 노즐의 에어 블로워를 사용해 캘리브레이션 구 표면을 가볍게 불어 먼지, 미세 입자 또는 표면에 떠 있는 이물질을 제거합니다.
-
먼지 없는 흰 천으로 캘리브레이션 구 닦기: 먼저 천에 잔여물이 없는지 확인하여 마찰로 인한 긁힘을 방지한 후, 먼지 없는 흰 천을 사용해 캘리브레이션 구 표면을 부드럽게 닦아줍니다.
-
다시 에어 블로워로 캘리브레이션 구 표면 불어주기: 닦은 후에 다시 한 번 소프트 노즐의 에어 블로워를 사용해 표면을 청소하여, 미세 먼지나 닦고 남은 섬유질이 남아 있지 않도록 합니다.
-
캘리브레이션 구 표면 점검: 캘리브레이션 구의 표면이 깨끗하고 눈에 띄는 먼지, 흙 또는 긁힌 자국이 없는지 주의 깊게 검사합니다.
기름때 검사 & 처리
캘리브레이션 구 표면에 기름때가 있는지 확인하고, 기름때가 있을 경우 무수 에탄올과 고품질의 무지(無織) 천으로 닦아내야 합니다.
-
준비 작업: 방진 장갑을 착용하여 피부가 캘리브레이션 구 표면에 직접 닿지 않도록 합니다. 이는 지문, 기름때 또는 기타 오염 물질이 남는 것을 방지하기 위함입니다.
-
캘리브레이션 구의 초기 청소: 무지 천에 무수 에탄올을 약간 묻혀 캘리브레이션 구 표면을 부드럽게 닦아줍니다.
-
캘리브레이션 구 닦기: 은 후 깨끗한 무지 천을 사용해 기름때 자국을 다시 한 번 닦아냅니다.
-
식기 세척액으로 캘리브레이션 구의 표면 청소: 위의 단계를 완료한 후에도 캘리브레이션 구 표면에 기름이 남아 있으면 식기 세척액을 사용하여 표면을 청소한 다음, 표면을 헤어드라이어로 말리거나 자연 건조하세요.
-
캘리브레이션 구 표면 점검: 캘리브레이션 구의 표면이 깨끗하고 눈에 띄는 먼지, 흙 또는 긁힌 자국이 없는지 주의 깊게 검사합니다.