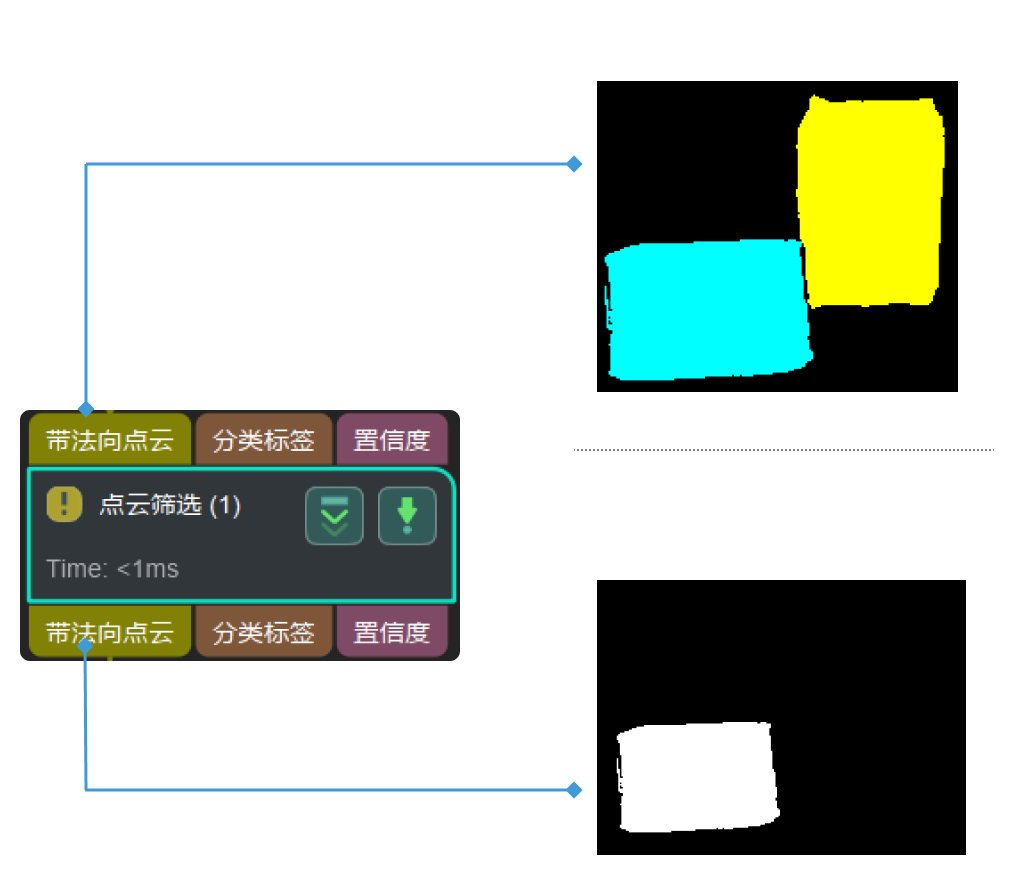
点云筛选
|
该步骤的内容已停止维护,请改用新版步骤 验证点云是否符合要求 。如果你急需了解该步骤的更多信息,请联系我们(docs@mech-mind.net)。 |
参数说明
筛选方法
参数解释:该参数用于选取点云筛选方法,共包含四种筛选方法:圆形点云过滤(CircleCloudsFilter)、点云容量过滤(CloudCapacityFilter)、矩形点云过滤(RecCloudsFilter)以及实心点云过滤(SolidCloudsFilter)。
默认值:CircleCloudsFilter
建议值:根据实际需求设置。
值列表:CircleCloudsFilter, CloudCapacityFilter,RecCloudsFilter,SolidCloudsFilter
圆形点云过滤(CircleCloudsFilter)
圆形点云过滤:将3D点云转换到2D掩膜图像上,得到掩膜的外轮廓并计算外轮廓的圆形度和周长,将不在阈值范围内的点云滤除。
- 轮廓检索模式
-
参数解释:该参数用于选取轮廓检索的模式,共包含两种类型:RETR_EXTERNAL和RETR_HULL。
默认值:RECT_EXTERNAL
建议值:根据实际检测需求设置。
- 最小面积
-
参数解释:该参数用于设置圆形点云的最小面积。
默认值:100
建议值:根据实际情况设置。
- 最大面积
-
参数解释:该参数用于设置圆形点云的最大面积。
默认值:1000
建议值:根据实际情况设置。
- 最小圆度
-
参数解释:该参数用于设置圆形点云的最小圆度。
默认值:0.5
建议值:根据实际情况设置。
- 最大圆度
-
参数解释:该参数用于设置圆形点云的最大圆度。
默认值:1
建议值:根据实际情况设置。
- 最小凸度
-
参数解释:该参数用于设置圆形点云的最小凸度。
默认值:0.8
建议值:根据实际情况设置。
- 最大凸度
-
参数解释:该参数用于设置圆形点云的最大凸度。
默认值:1
建议值:根据实际情况设置。
- 最小惯量
-
参数解释:该参数用于设置短轴长度与长轴长度的最小比率阈值。
默认值:0.6
建议值:根据实际情况设置。
- 最大惯量
-
参数解释:该参数用于设置短轴长度与长轴长度的最大比率阈值。
默认值:1
建议值:根据实际情况设置。
点云容量过滤(CloudCapacityFilter)
点云容量过滤:将点云列表中点个数不在阈值范围内的点云滤除。
- 最小点数阈值
-
参数解释:该参数用于设置最小点数。
默认值:6000
建议值:根据实际情况设置。
有效范围:(0,maxPointsNum)
- 最大点数阈值
-
参数解释:该参数用于设置最大点数。
默认值:360000
建议值:根据实际情况设置。
有效范围:(minPointsNum,+∞)
矩形点云过滤(RecCloudsFilter)
- 最小矩形度阈值
-
参数解释:该参数用于调整最小矩形度的大小。矩形度等于点云的实际面积与最小外接矩形的面积之比。
默认值:0.9000
建议值:根据实际情况设置。
实心点云过滤(SolidCloudsFilter)
- 比例阈值
-
参数解释:该参数是点云与被填充实体之间的大小的比值的最小值。
默认值:0.9000
建议值:根据实际情况设置。
有效范围:(0,1]
- 移除完全填充的点云
-
参数解释:该参数用于决定是否移除实心点云。勾选该参数后,将移除实心点云,反之移除空心点云。
默认值:勾选。
建议值:根据实际情况设置。