标定原理
本节介绍各场景下标定的工作原理。
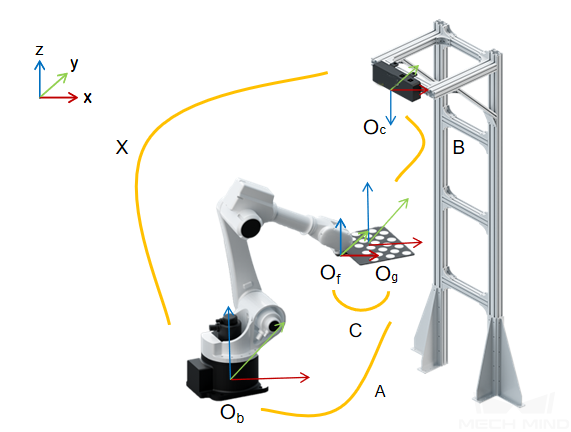
ETH 场景下的标定(标定板多个随机位姿)

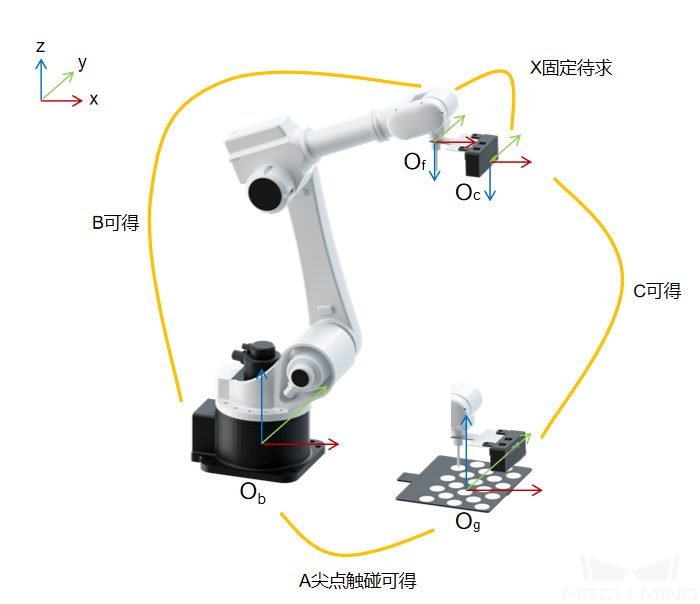
机器人末端通过法兰连接已知尺寸的标定板,可以得到标定板上的每个标志点相对于机器人基坐标(Base)的坐标 A;通过相机拍照获得标定板上每个圆点的图像,可以得到相机光心相对于标定板上每个标志点的坐标B;相机光心和机器人基坐标之间的位姿关系X为待求量。A、B 和 X 构成闭环,形成等式,可以在等式中求解未知数 X。标定板到法兰末端位置关系 C 未知,通过标定板在标定过程中的一系列相对移动,使用数值方法计算得到标定板到法兰末端的位置关系,进而计算得到 A。通过移动机器人,变换标定板相对于相机的位姿,可以得到多组等式,对这些等式的值进行拟合优化计算,最终得到最优的 X 值。位姿关系如下图所示。
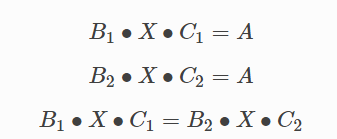
相机坐标系与机器人坐标系对应关系计算公式如下图所示。
EIH 场景下的标定(标定板多个随机位姿)

机器人末端通过固定架将相机固定,此时机器人末端法兰中心与相机光心之间的位姿相对固定,即下图中的未知变量 X;机器人末端法兰中心相对于机器人基坐标系(Base)的位姿为已知量 B;相机通过对标定板进行拍照,获得相机光心和标定板上每个圆点之间的位姿关系,可得已知量 C;标定板平放在相机视野可达区域,其相对于机器人基坐标之间的位姿关系为一固定值 A;这样变量 A、B、C、X 构成闭环关系。下列等式中,由于 A 为固定值,将前两个等式合并,得到的新等式中只有 X 为未知待求量。变换机器人末端位姿进行不同角度拍照,得到多组 A、B、C 的值,利用这些数值进行拟合计算,得到最优的 X 的值。
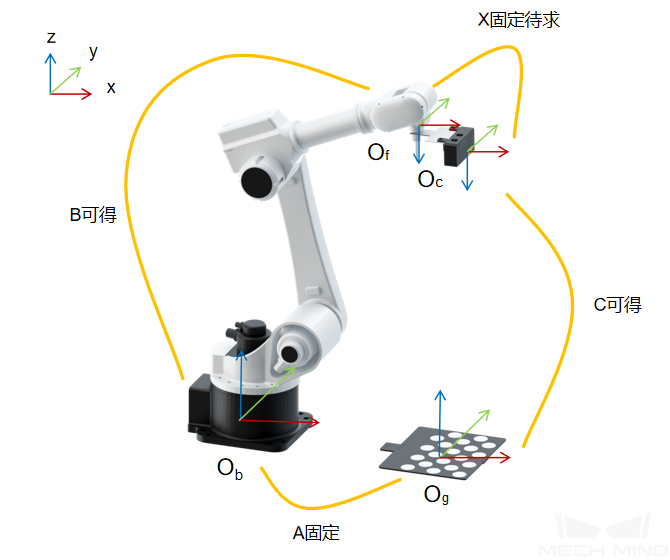
相机坐标系与机器人法兰坐标系对应关系计算公式如下图所示。
ETH 场景下的标定(TCP 尖点触碰)

使用 TCP 尖点触碰方法标定时,标定板放置在工作平面,机器人末端加装已知尺寸的尖点,触碰标定板圆的十字中心。其原理如下图所示,其中 A、B 已知,求解 X 的值。标定板与机器人末端不固定,通过已知 TCP 坐标的尖点对标定板标志点进行触碰的方式计算得到 A 的数值。
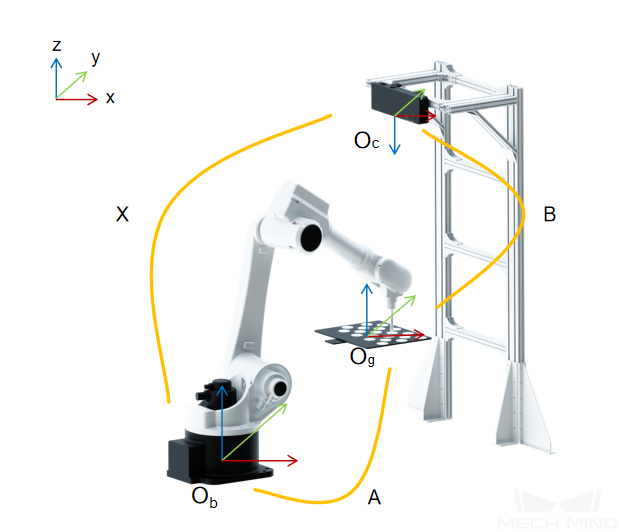
相机坐标系与机器人坐标系对应关系的计算公式如下图所示。
EIH 场景下的标定(TCP 尖点触碰)

使用 TCP 尖点触碰方法标定时,标定板放置在工作平面,机器人末端加装已知尺寸的 TCP 尖点,触碰标定板圆点,其原理如下图所示,其中 A、B、C 已知,则 X 的值也可求得。
相机坐标系与机器人法兰坐标系对应关系的计算公式如下图所示。
双相机(Eye to Eye)标定
使用双相机可以扩大相机视野、提高两个相机重叠部分点云质量, 如下图所示。
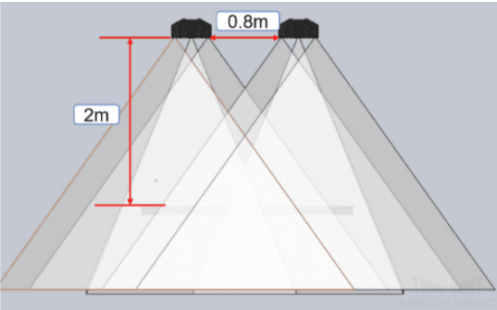
在双相机标定场景中,包含主相机和副相机两个相机,双相机独立于机器人固定在支架上。双相机标定既要完成每个相机的外参标定,又要标定两个相机之间的位姿关系。针对双相机标定场景,Mech-Vision 提供 Eye to Eye 标定流程。
|
所使用的两款相机的分辨率需要一致,且相机视野(2D&3D)重叠区域能够覆盖整个工作区域。 |
双相机标定只支持通过标定板多个随机位姿方法来采集标定数据,支持自动标定和手动标定方式。