让你的仿真机器人动起来
为了让你的仿真机器人运动起来,你需要给机器人规划一段路径。 “路径”由“路径点”构成,添加若干路径点,即可完成一段路径的规划。 使用“定点移动”步骤即可设置路径点。
-
操作视频演示
-
操作步骤说明
-
打开Mech-Viz,新建工程,选择任意一款机器人即可。
-
从步骤库中找到“定点移动”并将其拖拽到编辑区。
-
在右侧“关节角”参数栏,可以看到当前初始状态的仿真机器人各关节角数值。随意修改任意关节角数值(修改幅度可以大一些),可以看到仿真机器人位姿对应变化。此时修改后的位姿,就可以作为一个路径点。
-
将“开始”和“定点移动”连线,单击 仿真,可以看到仿真机器人运动到了上一步设置的路径点。
-
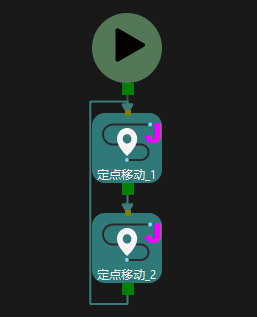
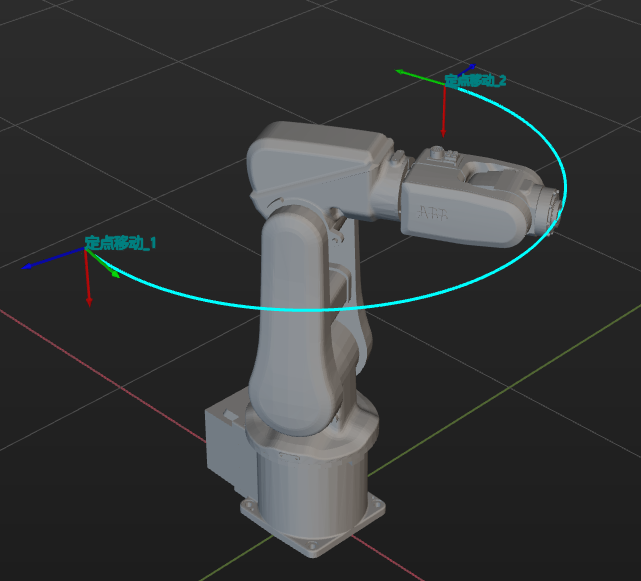
可以继续添加路径点。拖拽一个“定点移动”步骤,然后随意修改其关节角数值。连接“定点移动1”的输出与“定点移动2”的输入,单击仿真,可以看到仿真机器人由一个路径点运动到了另一个路径点。
-
将“定点移动2”的输出连接到“定点移动1”的输入,然后单击 仿真,可以看到仿真机器人在两个路径点之间循环运动。单击 停止 可停止运动。
工作流程
仿真效果
-
至此,你已经学会了最简单的机器人路径规划。