桁架机器人标定说明
相关概念
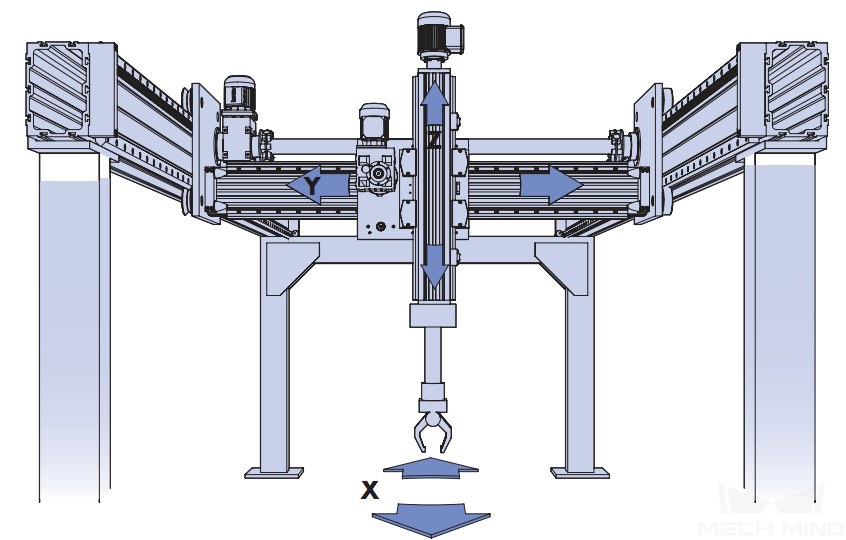
桁架机器人的自由度
桁架机器人支持多自由度运动,每个运动自由度之间的空间夹角为直角。
桁架机器人通常支持 2~6 个自由度,例如:
-
XYZ 三个轴可线性运动(三个自由度)
-
XYZ 三个轴可线性运动,并且 Z 轴(称为 Rz 或 C 轴)能旋转(四个自由度)
-
XZ 两个轴可线性运动(两个自由度)
-
XZ 两个轴可线性运动,并且 Z 轴能旋转(三个自由度)
相机通常固定安装在桁架的某个轴上(例如 Z 或者 C 轴),相机的拍照位置将受轴的运动的影响。因此在标定预配置中,需要指定哪些轴的移动会影响相机的位置。
左右手坐标系
梅卡曼德视觉系统使用右手坐标系下的机器人的法兰位姿来计算外参。因此,使用桁架机器人时,需要确定桁架坐标系是否为右手坐标系。
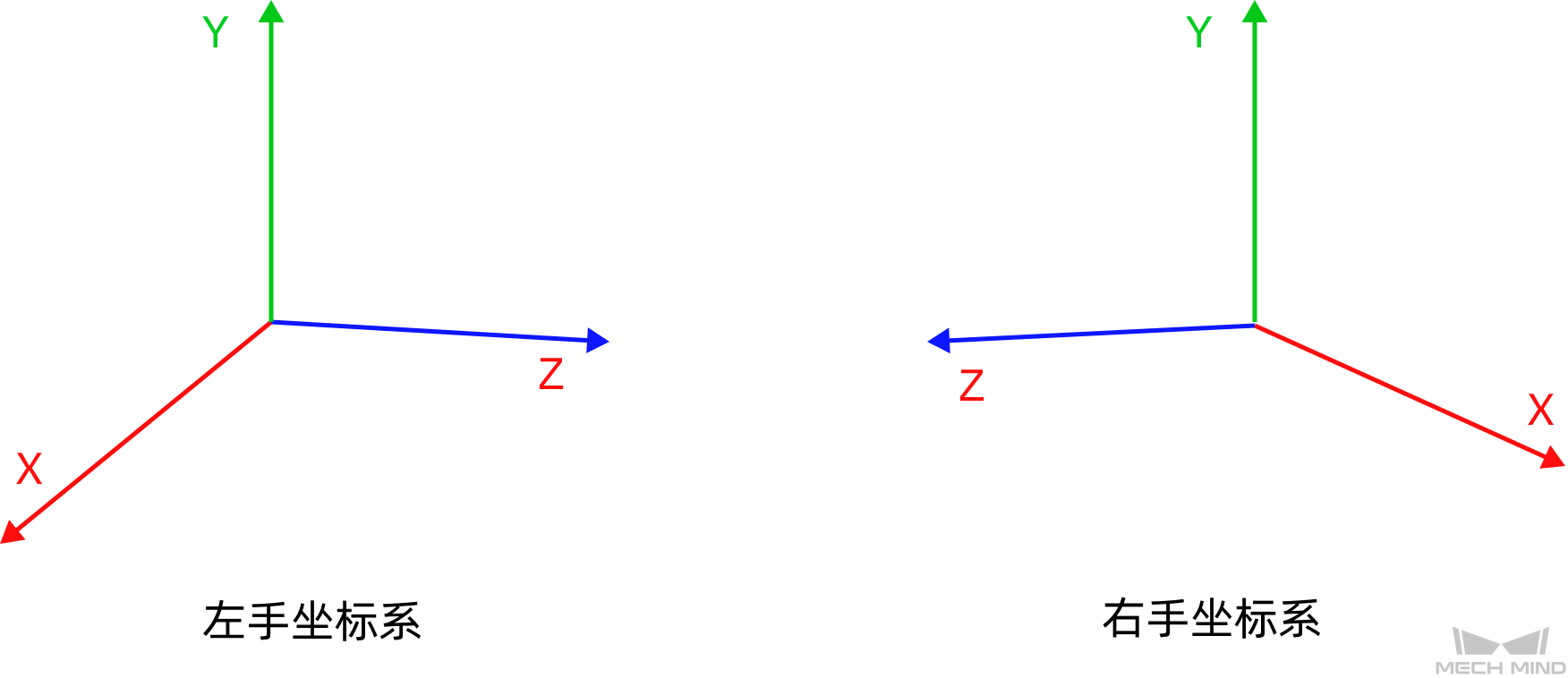
左右手坐标系的判断方法如下:
-
让左手拇指指向 X 轴的正方向,食指指向 Y 轴的正方向,如果中指能指向 Z 轴的正方向,则称这个坐标系为左手坐标系(见下图左图)。
-
让右手拇指指向 X 轴的正方向,食指指向 Y 轴的正方向,如果中指能指向 Z 轴的正方向,则称这个坐标系为右手坐标系(见下图右图)。
当桁架为左手坐标系时,建议将桁架更改为右手坐标系,以方便后续的标定以及视觉处理。通常,您需要在桁架机器人将 XYZ 任一轴的编码器运动正向取反。一般是对桁架基座安装的轴取反即可,然后在 Mech-Vision 软件中选择右手坐标系进行标定。
如果桁架侧无法设置,您只需要在 Mech-Vision 软件中选择左手坐标系,软件将自动对输入和输出的位姿数据进行转换。
标定原理
对于桁架机器人,相机通常安装在机器人的某个轴上,例如 Z 轴,即相机的安装方式为 Eye in Hand。因此,桁架机器人的标定旨在确定相机坐标系与机器人工具坐标系之间的相对关系。
针对桁架机器人自由度和活动空间受限的情况,Mech-Vision 软件使用 TCP 尖点触碰方法采集标定数据,建立标定板、相机及机器人三者间的关系。此外,桁架机器人的标定流程支持添加多块标定板的位姿。在因自由度受限无法移动桁架触碰到标定板上的三个特征点情况下,您可以使用多块标定板,通过控制桁架触碰多块标定板上的三个特征点(3 点不共线)即可。
关于桁架机器人的标定原理,请参考 EIH 场景下的标定(TCP 尖点触碰) 。
外参文件的使用
桁架机器人的标定过程生成的为标定位置的外参文件,Mech-Vision 会根据桁架机器人的位置实时计算动态外参。Mech-Vision 工程在计算动态外参时,需要搭配“点云变换(桁架)”和“位姿变换(桁架)”步骤使用,将相机坐标系中的点云/位姿转换到桁架坐标系中。
在运行工程时,请确保桁架机器人能与梅卡曼德视觉系统之间能够正常通信,并且机器人程序在触发 Mech-Vision 工程运行时提供机器人法兰位姿,使“从相机获取图像”步骤能够顺利获得拍照时的机器人法兰位姿。
|
如果桁架机器人使用左手坐标系,Mech-Center 软件自动先将机器人程序发送的机器人法兰位姿转换到右手坐标系中,再交由 Mech-Vision 进行视觉处理。返回视觉结果时,Mech-Center 软件先自动将 Mech-Vision 输出的桁架坐标系中位姿转换为左手坐标系中的位姿,然后返回给机器人程序。 |