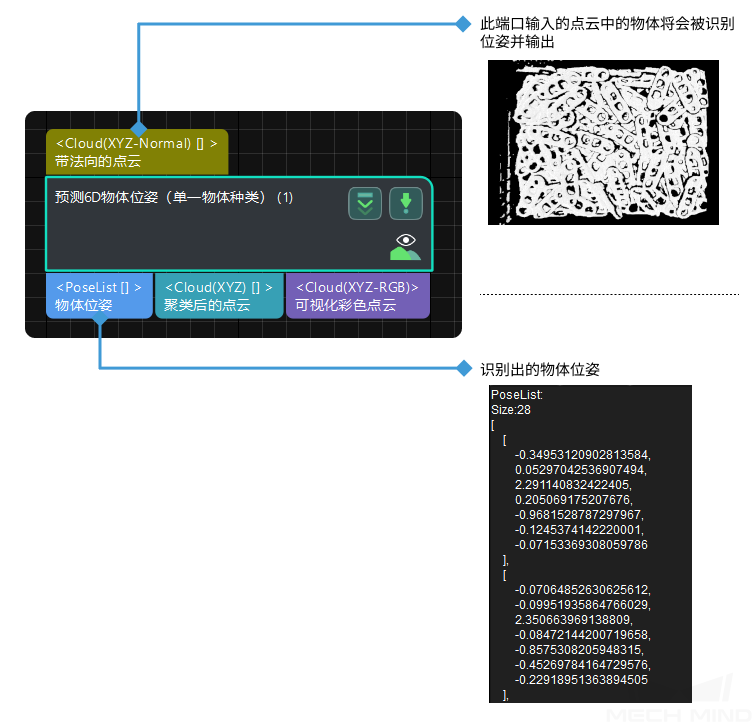
预测6D物体位姿(单一物体种类)
|
物体的 6D 位姿指物体坐标系转换到相机(或机器人)坐标系过程中的 3D 旋转和 3D 位移。 |
使用场景
该步骤用于单一种类物体的识别及定位。通常在该步骤之前连接 提取3D ROI内点云 步骤,用于输入预处理后的物体点云;在该步骤之后连接 显示点云与位姿 步骤,用于查看该步骤的可视化输出结果。
|
为了保证该步骤提供较高的精确性,前置步骤 提取3D ROI内点云 设置的 3D ROI 应仅包含目标工件,尽量不包含料筐的边框和筐底。 |
使用前提

参数说明
|
服务端
- 服务端 IP
-
参数解释:该参数用于指定深度学习服务器的 IP 地址。
默认值:127.0.0.1
调节说明:根据实际情况设置深度学习服务器的 IP 地址。
- 服务端 Port(1 ~ 65535)
-
参数解释:该参数用于指定深度学习服务器的端口号。
默认值:50058
调节说明:应使用小于 60000 的端口号。
|
打开工程后,需等待深度学习服务器启动成功,即日志栏出现启动深度学习服务器成功的信息后,再运行工程。 |
模型设置
- 模型文件
-
参数解释:该参数用于指定深度学习模型文件路径。
|
该步骤仅支持 GTX 1050 TI、RTX 2080、RTX 3060 三种类型的显卡。 首次运行该步骤时,需要一定时间加载模型,且不同性能的显卡加载模型的时间不同,请耐心等待。 |
物体设置
- 物体模型文件
-
参数解释:该参数用于指定物体模型文件路径。
- 几何中心文件
-
参数解释:该参数用于指定物体几何中心文件路径。
位姿优化
该步骤提供四种位姿优化功能选项:
-
基于物体位姿置信度过滤位姿:根据物体位姿置信度过滤位姿。启用该功能选项后,该步骤会对每个物体的位姿进行评分,并过滤掉物体位姿评分低于物体位姿置信度阈值的物体的位姿。
-
位姿精确校正:对物体位姿进一步优化,进行精确校正。
-
基于完整度过滤位姿:根据物体点云完整度过滤位姿。启用该功能选项后,该步骤将过滤掉点云完整度低于物体完整度阈值的物体的位姿。此外,该功能选项支持智能模式,智能化地自动确定物体完整度阈值。
-
基于物体间距过滤位姿:根据物体位姿间距过滤位姿。启用该功能选项后,该步骤将过滤掉物体位姿间距低于物体位姿间距阈值的物体的位姿。此外,该功能选项支持智能模式,智能化地自动确定物体位姿间距阈值。
|
参数完整度过滤位姿(智能)、物体完整度阈值、物体间距过滤位姿(智能)和物体位姿间距阈值,需在显示全部参数模式下才能显示。 |
- 物体位姿置信度阈值
-
参数解释:该参数用于为物体位姿置信度过滤位姿功能选项手动设置物体位姿间距阈值。取值为 0.00 时,表示禁用物体位姿置信度过滤位姿功能选项。
默认值:0.20
值范围:0.00~1.00
调节建议:需根据实际情况设定该参数。
- 位姿精确校正
-
参数解释:该参数用于对物体位姿进行精确校正。
默认值:勾选。
调节建议:当后续步骤中没有 :ref:`3d_fine_matching` 步骤时,建议开启该功能。
- 完整度过滤位姿(智能)
-
参数解释:该参数用于为完整度过滤位姿功能选项开启或关闭智能模式。勾选表示启用,不勾选表示关闭。指定根据物体完整度阈值过滤物体时的阈值设置方式。
默认值:勾选
调节说明:启用智能模式后,该步骤将自动确定物体完整度阈值,因重叠而导致点云不完整的物体将会被滤除。若未勾选,需手动设置物体完整度阈值。
- 物体完整度阈值
-
参数解释:当通过物体完整度过滤位姿时,该参数用于手动设置物体完整度阈值。物体完整度小于该阈值的位姿将被过滤。取值为 0.00 时,表示禁用完整度过滤位姿功能选项。
默认值:0.00
调节说明:当未勾选完整度过滤位姿(智能)时,需设置该参数。
- 物体间距过滤位姿(智能)
-
参数解释:该参数用于为物体间距过滤位姿功能选项开启或关闭智能模式。勾选表示启用,不勾选表示关闭。
默认值:勾选。
调节说明:启用智能模式后,该步骤将自动确定物体位姿间距阈值。关闭智能模式后,需要手动设置物体位姿间距阈值参数。
- 物体位姿间距阈值
-
参数解释:当通过物体间距过滤位姿时,该参数用于手动设置物体位姿间距阈值,物体位姿间距小于该阈值的位姿将被过滤。取值为 0.00 时,表示禁用物体间距过滤位姿功能选项。
默认值:0.10
调节说明:当未勾选物体间距过滤位姿(智能)时,需设置该参数。
实例聚类
在该步骤中,存在两种聚类算法,分别为 MeanShift 和 RegionGrowing。
- 聚类算法
-
参数解释:该参数用于选择使用哪种聚类算法。
值列表:MeanShift、RegionGrowing
当聚类算法为 MeanShift 时,需调节以下参数。
- 聚类带宽
-
参数解释:该参数用于决定距离多近的点可聚类到一起。值越大,距离越远的点越容易被聚为一簇。当该参数偏大时,可能会把两个以上的物体聚类成一个物体;当该参数偏小时,可能会把一个物体分离成两个以上的物体。
默认值:10
调节建议:需根据实际情况设定该参数。
- 类点数下限
-
参数解释:该参数用于设置簇中最小点数。聚类时,当簇中点数低于该下限时,该簇将被忽略。
默认值:30
调节建议:需根据实际情况设定该参数。
当聚类算法为 RegionGrowing 时,需调节以下参数。
- 类点数下限
-
参数解释:该参数用于设置簇中最小点数。聚类时,当簇中点数低于该下限时,该簇将被忽略。
默认值:30
调节建议:需根据实际情况设定该参数。
- 聚类半径
-
参数解释:该参数用于决定距离多近的点可聚类到一起。值越大,距离越远的点越容易被聚为一簇。当该参数偏大时,可能会把两个以上的物体聚类成一个物体;当该参数偏小时,可能会把一个物体分离成两个以上的物体。
默认值:0.5
调节建议:需根据实际情况设定该参数。
- 相邻点数目
-
参数解释:在聚类半径内,该参数用于决定某个点和距离最近的多少个点聚类到一起。
默认值:30
调节建议:需根据实际情况设定该参数。
可视化
- 开启
-
参数解释:该参数用于选择是否开启可视化功能。
默认值:不勾选。
- 可视化参数
-
参数解释:该参数用于选择想要可视化的内容。
值列表:
-
物体实例:聚类后的场景点云,可通过不同的颜色区分各个物体。
-
物体中心:聚类后,根据物体每个点计算得到的几何中心点形成的点簇。
调节建议:根据实际需求设定该参数。
-