拆垛吸盘(单抓)
工具类型为拆垛吸盘(单抓)时可调节以下参数。
吸盘配置/偏置方式
在吸盘箱子拆垛作业中,通常情况下吸盘固定且不可更换,而箱子尺寸较为多变,往往需要一个吸盘应对多种不同尺寸的箱子。 为了避免吸盘在抓取目标箱子时误吸到其周边的非目标箱子,拆垛时往往需要吸盘进行偏置抓取。
吸盘偏置共三种模式:默认、依边角号顺序、自定义策略优先级。
自定义策略优先级
该模式下用户可以指定吸盘偏置策略的优先级。
策略优先级
偏置策略共三种,分别为:中心对中心、边中点对边中点,角对角,可根据实际需求设置各级策略的偏置方式。
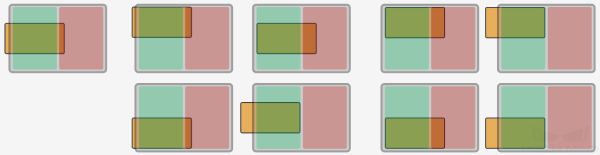
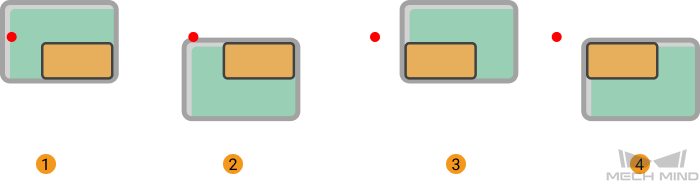
下图中橘黄色长方形代表箱子,灰色长方形代表吸盘,吸盘内部绿色代表开启的分区,红色代表关闭的分区。

-
吸盘只开启单个分区
如下图所示,左侧为中心对中心抓取,中间为吸盘边中点对箱子边中点抓取,右侧为吸盘角对箱子角抓取。
-
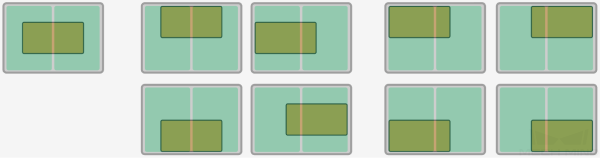
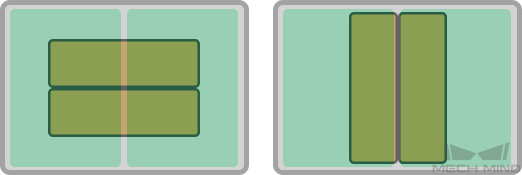
吸盘开启两个分区
如下图所示,左侧为中心对中心抓取,中间为吸盘边中点对箱子边中点抓取,右侧为吸盘角对箱子角抓取。
-
开启的吸盘分区多于两个时以此类推。
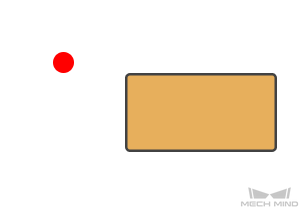
避免在同一位姿抓取
此组参数主要用在抓取失败的场景中,避免在同一个位置上重复失败。
直接丢弃的范围半径上限
| 默认值 |
0 |
| 调节说明 |
若某位姿与上次抓取的位姿的空间直线距离小于此阈值,则丢弃此位姿。 |
| 应用示例 |
假设抓取某个曲轴,第一次尝试未将曲轴抓起,但尝试抓取的过程中戳动曲轴,位置移动后下次抓取可能成功。因此,使用 优先级降低的范围半径上限 降低其优先级但并不丢弃。若尝试抓取时曲轴纹丝不动,再次抓取基本上也不可能成功,使用 直接丢弃的范围半径上限 丢弃该位姿,避免反复抓取。 |