视觉移动
功能描述
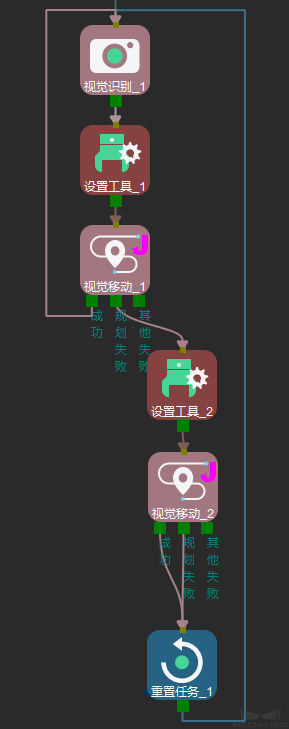
依据从视觉服务中获得的视觉位姿移动。
| 出口 | 说明 |
|---|---|
成功 |
路径规划成功 |
规划失败 |
路径规划失败 |
其他失败 |
尚未规划时,视觉移动无可规划数据。包括但不限于: Mech-Vision 未输出位姿; Mech-Vision 输出位姿,但无满足条件的结果。 |
参数说明
本章中,![]() 表示未勾选,
表示未勾选, ![]() 表示勾选。
表示勾选。
移动步骤基本参数
尝试平滑通过其后的非移动类步骤
默认不勾选,即当 移动类步骤 之间连接 非运动步骤 时,比如 “视觉识别” 、“设置” 、“检查DI”等,会打断机器人的路径规划,真实机器人运行时会出现短暂的停顿,导致机器人运行动作不流畅。 勾选后,不需要等待当前移动步骤运行结束就可以继续往下执行,以此规避机器人停顿的问题,保证机器人运行动作的流畅性,但可能会导致步骤提前结束。
|
为何会导致步骤提前结束? Mech-Viz 软件运行时会同时发给机器人多个位姿,软件只判断发送给机器人的最后一个位姿是否与机器人当前返回的关节角相同,如果相同则认为机器人已经移动到最后一个位置。 比如一段路径由 10 个移动步骤组成,路径中的移动步骤 5 与最后一个移动步骤的位姿相同。在机器人运行速度较慢时,机器人移动到移动点 5 后并把当前关节角发给 Mech-Viz ,因为路径中的移动步骤 5 与最后一个移动步骤位姿相同,Mech-Viz 软件会误判为路径步骤完成而提前结束指令。 |
不检查与已放置工件的碰撞
默认不勾选,即检查与已放置工件的碰撞;勾选后,将不检查机器人本体、末端工具与已经放置的工件模型之间的碰撞。
在码垛应用中有以下两种情况:
-
码垛场景中,机器人码放纸箱时本体可能会与已放置的纸箱轻微接触(不会出现纸箱挤压变形的情况),Mech-Viz 检查到这个碰撞后规划其他纸箱放置点,导致无法满垛。
-
一般吸盘设置的 TCP 不在吸盘表面,在模型内部,这样抓取物体时末端工具与被抓取的纸箱模型存在嵌套的情况(软件不检查末端工具与工件碰撞情况),当机器人放下纸箱后,被抓取的纸箱模型改变为场景模型,此时软件会检查到末端工具与场景中的纸箱模型发生碰撞,软件发出碰撞报警,无法完成码垛步骤。
勾选此参数,软件不再检查机器人本体、末端工具与已经放置的工件模型之间的碰撞关系,从而解决上述问题。
点云碰撞检查模式
根据现场实际情况来设置参数,一般使用默认 自动 。机器人抓取物体前的移动步骤可选择 从不 模式,抓取物体后的移动步骤可选择 总是 模式。
| 自动 |
默认值。仅对“视觉移动”步骤及依赖于“视觉移动”步骤的“相对移动”步骤检查点云碰撞,其他的移动类步骤不检查。 |
| 从不 |
全部移动类步骤均不检查点云碰撞。 |
| 总是 |
全部移动类步骤均检查点云碰撞。 |
| 当打开 功能时,Mech-Viz 软件在做路径规划时会检查机器人模型、末端工具模型与点云的碰撞情况。 一般点云碰撞的设置是检查机器人抓取过程中是否会与工件发生碰撞,当空间中有噪点时,软件在做抓取物体前的路径规划时噪点与机器人模型、末端工具模型接触,造成与点云碰撞的误检测,导致软件规划错误。 |
忽略工件对称性
该参数仅对 目标类型 为 工件位姿 的移动生效,如:目标类型为工件位姿的移动类步骤、码垛类步骤等,而目标类型为关节角、工具位姿的移动类步骤不生效。
| 无 |
默认值,不关闭任何对称性; |
| 绕工件坐标系 Z 轴 |
仅关闭 Z 轴对称性; |
| 绕工件坐标系 X 和 Y 轴 |
仅关闭 X&Y 轴对称性; |
| 绕所有轴 |
关闭所有对称性。 |
关闭对称性设置后,机器人会严格按照工件位姿放置工件。
|
遇到某些特殊情况而导致物体不可抓取时,可以设置 中的 旋转对称 。 针对识别出的物体设置物体对称性,根据对称性角度,工件可具有多个候选位姿。 Mech-Viz 软件在规划物体抓取时,若默认位姿无法抓取,会尝试候选位姿是否可抓。 物体对称位姿与 Mech-Vision 输出的原始位姿不一致,无法保证机器人放置物体的一致性。 |
视觉结果全局配置
移除即将被抓工件点云
移除被抓取的工件点云,以保证点云碰撞检测仅计算机器人末端工具与非目标工件点云之间的碰撞程度。
基本运动配置
基本运动配置为移动类步骤主要调节参数,用来控制机器人移动到该路径点的 速度 及 运动方式 。
抓放设置
| 未指定 |
默认值 |
| 抓 |
“视觉移动“前的移动类步骤。 |
| 放 |
“视觉移动”之后的移动类步骤。 |
| 调节说明 |
使用抓放设置可用于 Mech-Viz 工程运行逻辑检查。按照现场实际运行流程,先抓后放的基本原则,对移动类步骤进行抓、放设置。 |