ロボットライブラリツールに関する操作
以下では、ロボットライブラリツールの操作方法について説明します。
ロボットをインポート
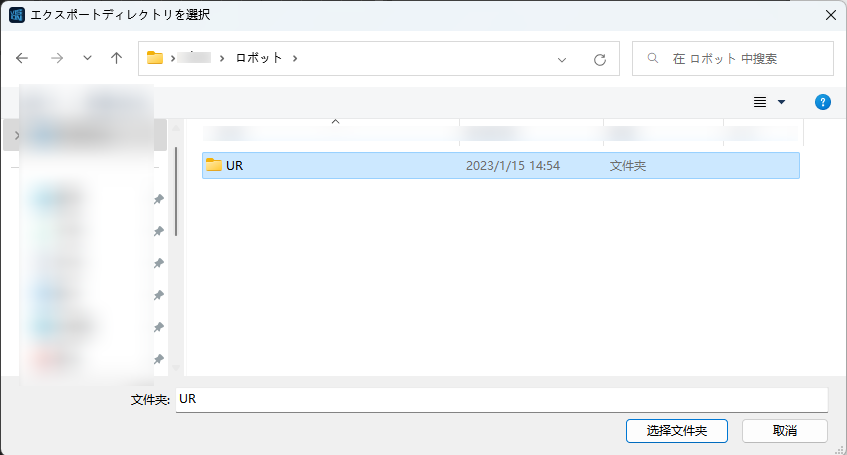
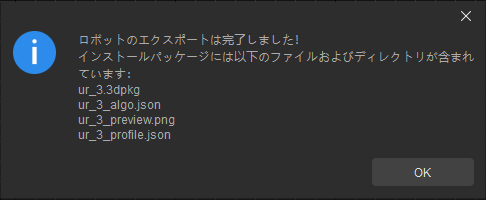
| ロボットのインストールパッケージファイル(.mrob)とは、Mech-Vizのメニューバーから「ツール」>「ロボットライブラリ」>「現在のロボットをエクスポート」またはMech-Visionのメニューバーから「ロボットと通信」>「ロボットライブラリツール」>「現在のロボットをエクスポート」でエクスポートされたファイルを指します。 |
ロボットをインポートするには、次のいずれかの方法を使用します。
-
方法1
-
マウスの左ボタンを押しながら、.mrobファイルをMech-Visionソフトウェアウィンドウにドラッグし、その後マウスの左ボタンを離します。
-
すると、「ロボットを正常にインポートしました」というポップアップウィンドウが表示され、 OK をクリックします。
-
-
方法2
-
Mech-Visionのメニューバーで をクリックします。
-
すると、ファイル選択画面が表示されますので、.mrobファイルを選択して 開く をクリックします。
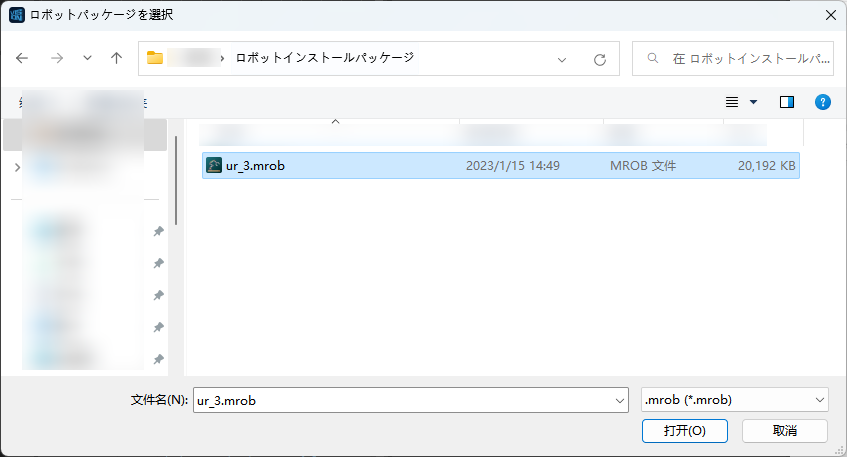
-
「ロボットを正常にインポートしました」というポップアップウィンドウが表示され、 OK をクリックします。
-