ビジョン処理による移動
機能
ビジョンサービスから受信しら結果に基づいてロボットの把持経路と位置姿勢を計画します。
| 出口 | 説明 |
|---|---|
成功 |
経路の計画に成功した |
計画失敗 |
経路の計画に失敗した |
他の失敗 |
計画していないとき、使用できるデータはない。経路を計画していないとき、ビジョン処理による移動に必要なデータはない。( Mech-Vision から位置姿勢が出力されない場合、 Mech-Vision から位置姿勢が出力されが要件を満たしている結果はない場合を含むが、これに限定されるものではない) |
使用シーン
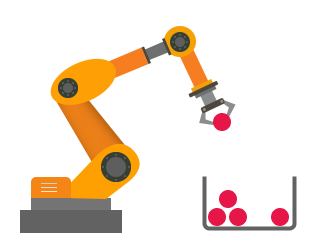
使用シーンと使用するロボットハンドによって、一般的な把持、デパレタイズ用把持、配列タイプグリッパの 3つの把持方法が選択できます。
実際に応じて選択してください。また、調整できるパラメータは把持方法によって異なります。詳細は以下の内容をお読みください。
把持方法 |
説明 |
イメージ図 |
|
ワーク、宅配便を把持する。
|
|
||
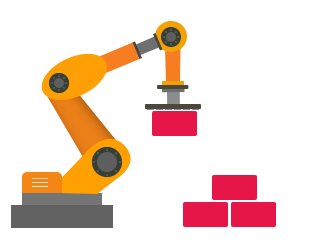
箱のデパレタイジング |
段ボール箱やコンテナ、麻袋を把持し、一回に 1つだけ把持する。
|
|
|
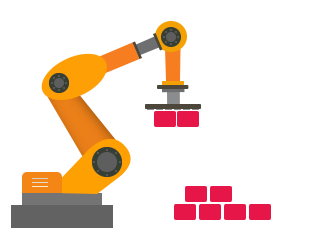
段ボール箱やコンテナ、麻袋を把持し、一回に複数把持する。
|
|
||
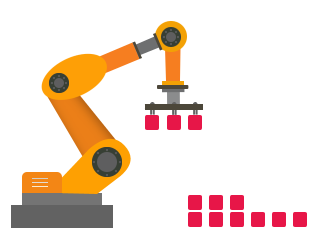
ロボットハンドに複数のエンドがあり、各エンドはそれぞれ 1つの対象物を把持する。今、単列の吸盤のみをサポートしている。 |
|
||