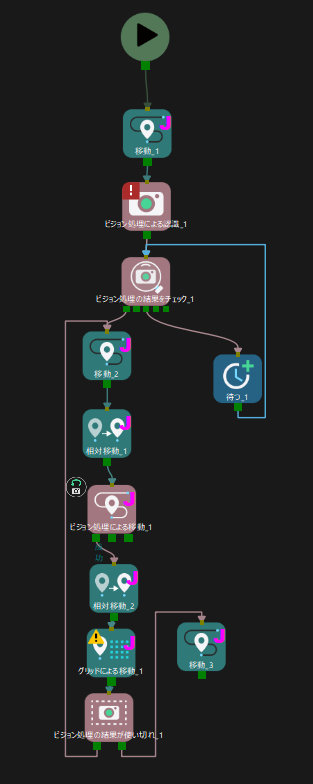
把持点が使い尽くされたか
機能
指定した 「ビジョン処理による移動」 ステップのビジョン処理の結果が使い尽くされたかをチェックします。
| 「ビジョン処理による移動」 ステップのパラメータ ビジョン処理の結果を再使用 にチェックを入れなければ使用できない。 |
使用シーン
「ビジョン処理による移動」 ステップのビジョン処理の結果に複数の使用可能なビジョン位置姿勢がある場合、それが全部使用されるまでロボットが順番に把持を実行します。
ビジョン処理の結果にある位置姿勢を使い切れたら画像を取得します。短いタクトタイムが求められる現場では、ビジョン処理の結果を再使用することでビジョン処理の時間を短縮できます。