ハンド・アイ・キャリブレーションフローを選択
ハンド・アイ・キャリブレーションとは、カメラ座標系とロボット座標系との対応関係を求めること を指します。ビジョンシステムにより取得した対象物の位置姿勢をロボット座標系に変換し、それによってロボットが正確に把持作業を完了できるように制御します。ハンド・アイ・キャリブレーションの結果の精度は、ロボットの把持精度に影響を与える重要な要因の一つです。
Mech-Mindビジョンシステムが構築されたら、ロボットのハンド・アイ・キャリブレーションを実行します。また、以下の状況でハンド・アイ・キャリブレーションを再度実行する必要があります。
-
カメラがロボット台座(Eye to hand取り付け方式)またはフランジ(Eye in hand取り付け方式)に対して位置が変更された場合。
-
カメラを交換した場合。
-
ロボットを交換した場合。
適切なキャリブレーションフローを選択
ロボットの通信方式、カメラの取り付け方式、キャリブレーション実行方法、データの取得方法など、キャリブレーションの実行に影響します。
|
ロボットの通信方式、カメラの取り付け方式、キャリブレーション実行方法、データの取得方法に関する説明については、キャリブレーションの関連概念 をご参照ください。 |
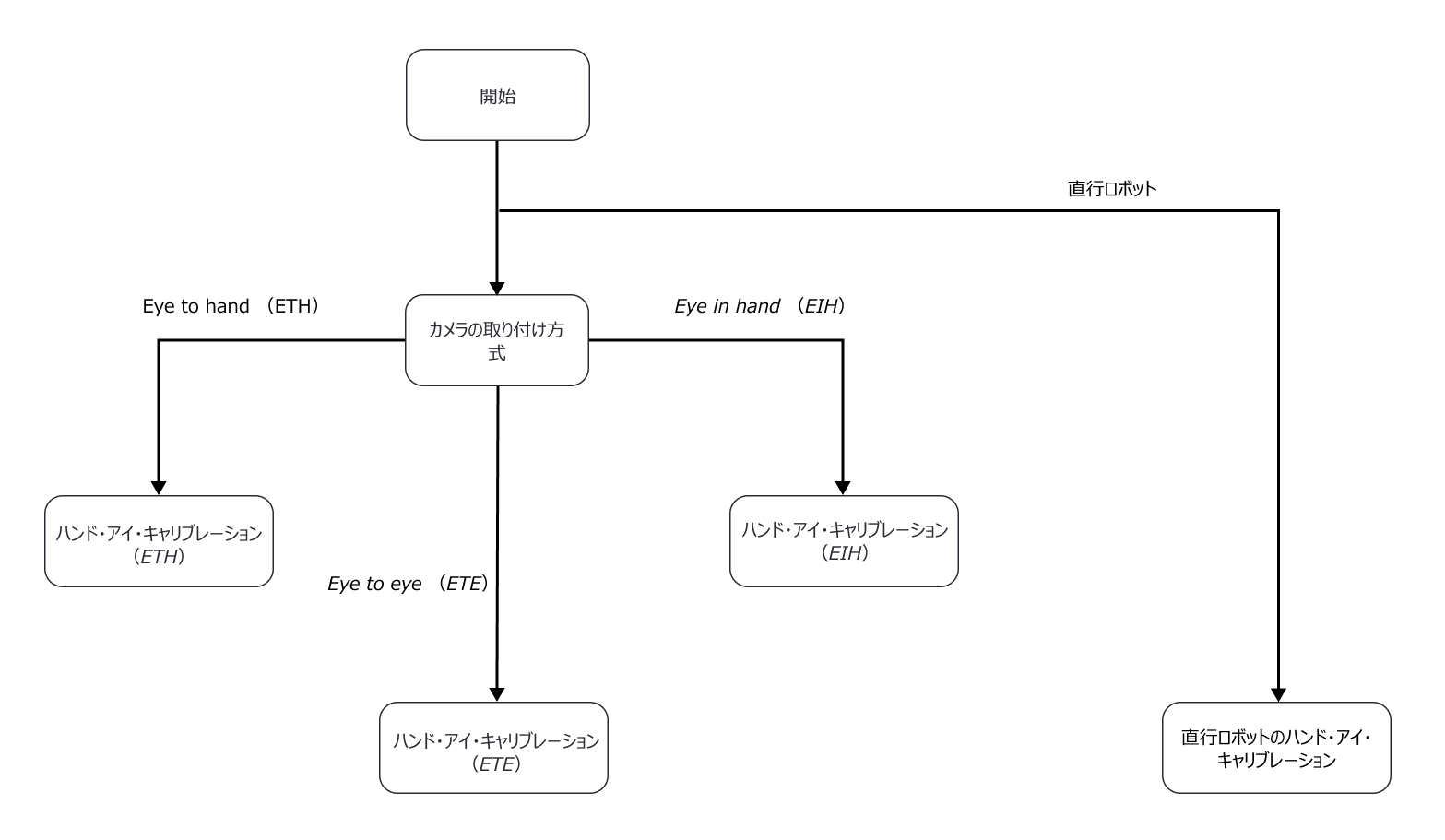
カメラの取り付け方式に従って適切なキャリブレーションフローを選択してください。
-
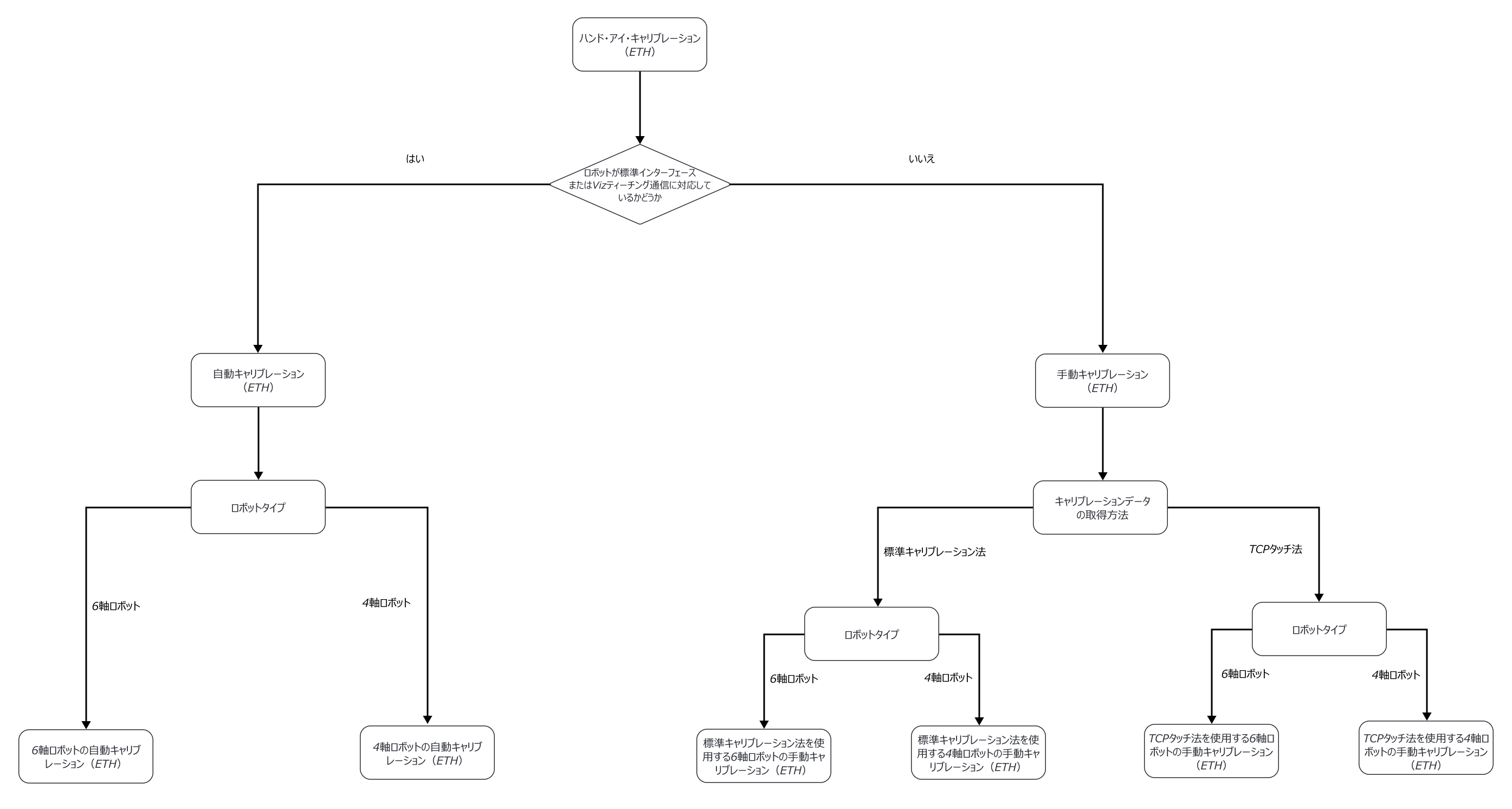
カメラがEye to Hand(ETH)方式で取り付けられている場合は、ハンド・アイ・キャリブレーション(ETH) をご参照ください。
-
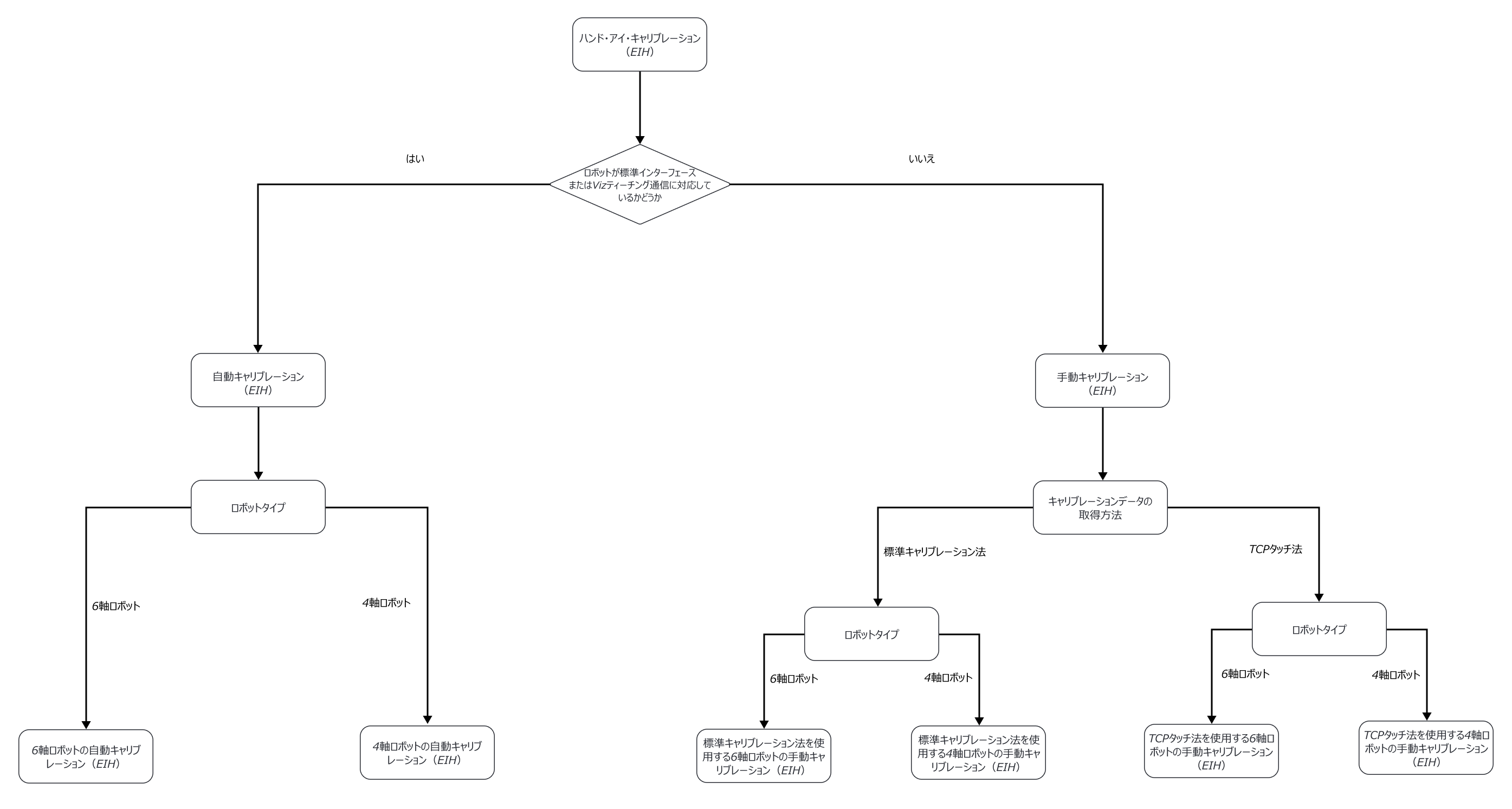
カメラがEye in Hand(EIH)方式で取り付けられている場合は、ハンド・アイ・キャリブレーション(EIH) をご参照ください。
-
カメラがEye to Eye(ETE)方式で取り付けられている場合は、ハンド・アイ・キャリブレーション(ETE) をご参照ください。
| 直行ロボットを使用する場合、直行ロボットのキャリブレーション をご参照ください。 |