出力
入力と出力
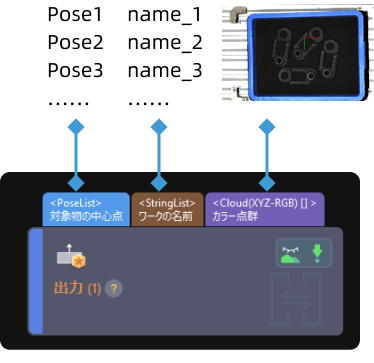
プロジェクトの結果出力ステップとして、このステップには出力ポートはなく、入力ポートのみが存在します。入力ポートには3種類があり、異なる ポートタイプ は異なるデータ入力ポートに対応しています。
例として「事前定義済み(ビジョン結果)」ポートタイプの場合、ステップの入力は以下のようになります。
パラメータ説明
ポートタイプ設定
- ポートタイプ
-
パラメータ説明:このパラメータは、ステップのポートタイプを選択するために使用されます。
オプション:事前定義済み(ビジョン結果)、事前定義済み(ロボット経路)、カスタム
-
事前定義済み(ビジョン結果):Mech-Visionのみを使用してビジョン処理を行い、その後ビジョン結果をMech-Vizや外部サービスに送信する場合、このポートタイプを選択することをお勧めします。
-
事前定義済み(ロボット経路):Mech-Visionを使用してビジョン処理と経路計画を行う場合、このポートタイプを選択することをお勧めします。
-
カスタム:Mech-Vizに送信するデータを自分で選択する必要がある場合、このポートタイプを選択することをお勧めします。
初期値:事前定義済み(ロボット経路)
調整説明:実際のニーズに応じて設定してください。
-
事前定義済み(ビジョン結果)
適用シーン
- シーンを選択
-
パラメータ説明:現在のソリューションの適用シーンを選択します。
オプション:マッチング、デパレタイジング、その他
-
マッチング:ワークライブラリ内でワークを作成し、点群モデルマッチング方法でワークの位置姿勢を取得するシーンに適しています。
-
デパレタイジング:デパレタイズのシーンに適しており、ディープラーニングやその他の方法でワークの位置姿勢を直接取得できるため、点群モデルマッチングは不要です。
-
その他:上記の2つシーン以外で、その他の方法でワークの位置姿勢を取得するシーンに適しています。
初期値:マッチング
-
- データ変換方式
-
パラメータ説明:このパラメータは、結果の変換方法を選択するために使用されます。このステップでは認識結果を把持に必要なデータタイプに変換します。
オプション:対象物中心点に基づいて把持戦略を生成、把持位置姿勢に基づいて把持戦略を生成
-
対象物中心点に基づいて把持戦略を生成:対称性を持つワークに適しています。ワークの中心点の方向を調整する必要があります。
-
把持位置姿勢に基づいて把持戦略を生成: 複数の把持位置姿勢を持つワークに適しています。位置姿勢のフィルタリングが必要です。
初期値:対象物中心点に基づいて把持戦略を生成
-
衝突検出設定
- 点群を外部サービスに送信
-
パラメータ説明:このパラメータは、点群をMech-Vizに送信し、プロジェクトのデバッグやプロジェクトの実行結果を確認するために使用されます。
初期値:チェックを入れる
- 点群タイプ
-
パラメータ説明:このパラメータは、Mech-Vizに送信する点群タイプを選択するために使用されます。
オプション:CloudXYZRGB(カラー点群)、CloudXYZ(点群)、CloudXYZNormal(法線ベクトル付きの点群)
初期値:CloudXYZRGB
- 点群がカメラ座標系にある
-
パラメータ説明:点群がカメラ座標系にある場合、このパラメータにチェックを入れる必要があります。チェックを入れると、点群がロボット座標系に変換されてMech-Vizに送信されます。チェックを入れないと、点群がMech-Vizに直接送信されます。
初期値:チェックを入れる
- ワークの点群を除去
-
パラメータ説明:このパラメータは、ワークと重なり合っている点群を除去し、ロボットハンドとの衝突を避けようとするために使用されます。
初期値:チェックを入れない
- ワーク点群の検索半径
-
パラメータ説明:ワーク点群の任意の点を円の中心とし、検索半径内の点群は除去されます。このパラメータは、ワークの点群を除去 にチェックを入れた場合に設定する必要があります。
初期値:3 mm
その他の入力設定
- その他の入力
-
パラメータ説明:このパラメータにチェックを入れると、ステップには「把持位置姿勢のラベル」、「ワークの寸法」、「把持位置姿勢のオフセット」の入力ポートが追加されます。
初期値:チェックを入れない
調整説明:新規入力ポートはオプションポートであり、実際のニーズに応じて新しいポートに接続することができます。
シーンの物体の更新設定
- シーンの物体を更新
-
パラメータ説明:このパラメータは通常、コンテナの位置姿勢を動的に更新する必要がある場合に使用されます。チェックを入れると、ステップには「シーンの物体の名前」、「シーンの物体の寸法」、「シーンの物体の位置姿勢」の入力ポートが追加されます。
初期値:チェックを入れない
カスタム
- ポート名をカスタマイズ
-
パラメータ説明:このパラメータは、入力ポートをカスタマイズするために使用されます。
調整説明:エディタを開く をクリックし、表示される「出力設定アシスタント」画面で追加する入力ポートを選択します。
入力ポート 説明 備考 poses
対象物の位置姿勢。配列形式。
必須選択
labels
対象物のラベル。配列形式、長さが poses と同じです。
オプション
sizes
対象物の三次元サイズ。長さが poses と同じ、または0です。
オプション
offsets
対象物中心点に対する把持位置姿勢のオフセット。配列形式、長さが poses と同じ、または0です。
オプション
objectIndexes
対象物のインデックス。配列形式、長さが poses と同じ、または0です。
オプション
scene_object_names
更新するシーンの物体の名前リスト。
オプション
scene_object_sizes
更新するシーンの物体の寸法リスト。
オプション
scene_object_poses
更新するシーンの物体の位置姿勢リスト。
オプション
workobject_data
Mech-Vizに入力するワーク情報。例えば、把持位置姿勢に関する情報(把持位置姿勢の数値ラベル、ワーク中心点に対する把持位置姿勢のオフセットなど)、各把持位置姿勢が位置するワークに関する情報。
オプション
|
「workobject_data」入力ポートのみを追加した場合、100、102、105、110標準インターフェースコマンドを呼び出してもデータを取得できません。 |