使用例
ロボットハンドの衝突モデルを作成するときに、細部まで考慮する必要はありません。
凸包モデルを作成する前に、モデルを全体的に評価して各部分の役割を確認しておいたほうがいいです。凸包モデルを作成する時に、対象物と接触する部分(グリッパーやフランジコネクタなど)を細かい部分までしっかりと作成する必要があり、できる限りに実際の形状に沿うようにしてください。対象物と接触しない部分、またロボットに繋がらない部分(カメラ、センサー、コネクタなど)を大まかに作成すればいいです。
以下では、例を挙げて詳しく説明します。
-
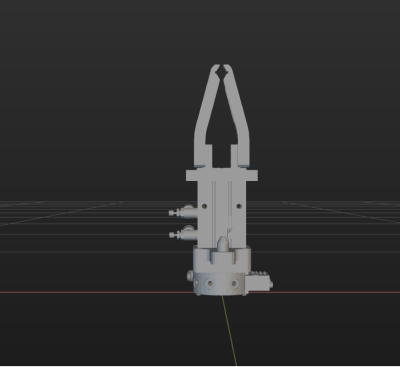
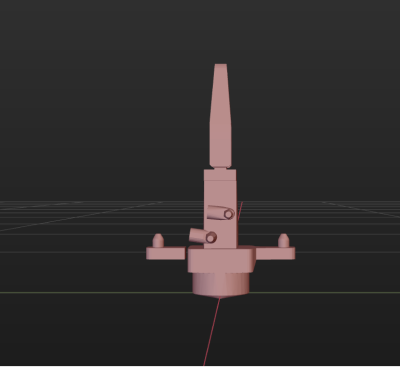
例 1:
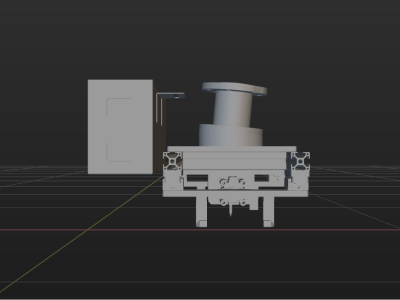
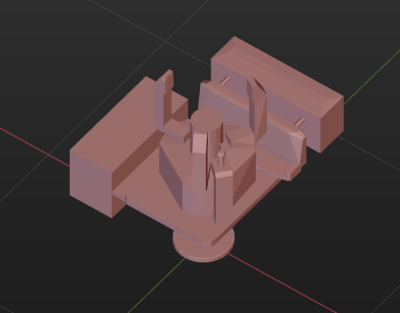
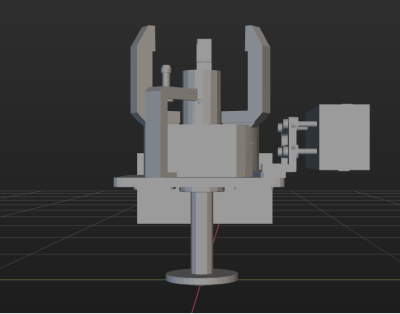
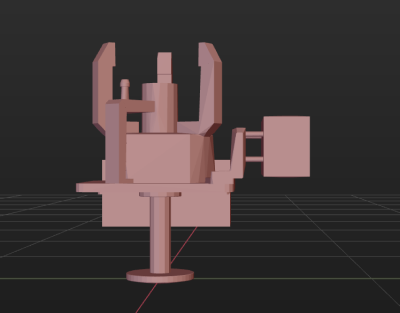
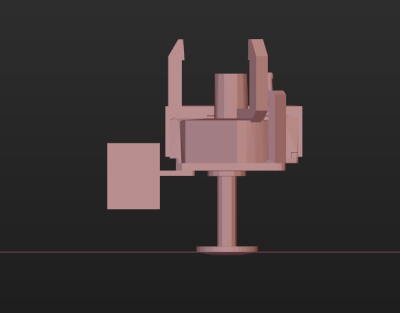
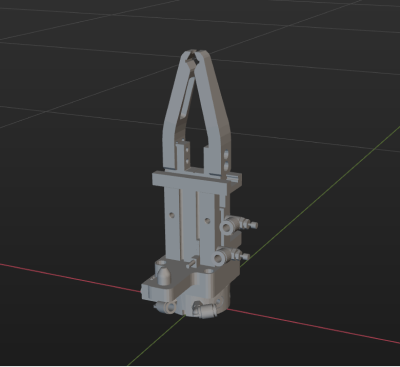
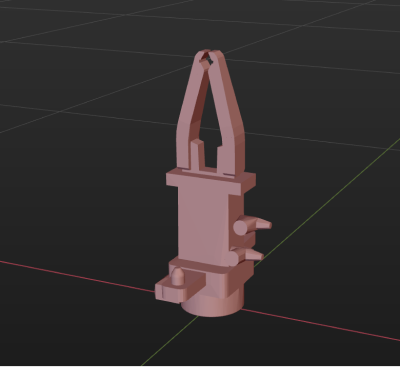
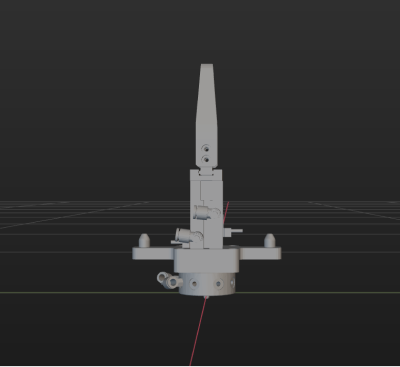
ビュー 編集前 編集後 カスタマイズビュー
正面図
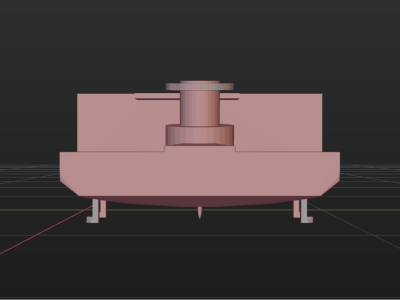
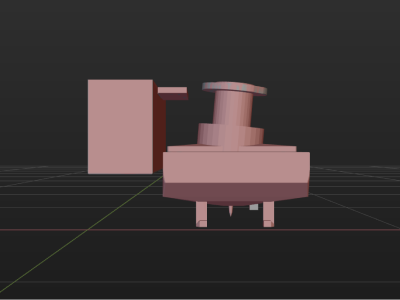
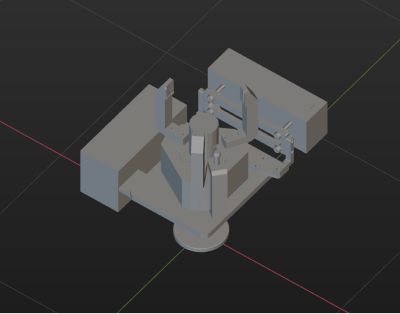
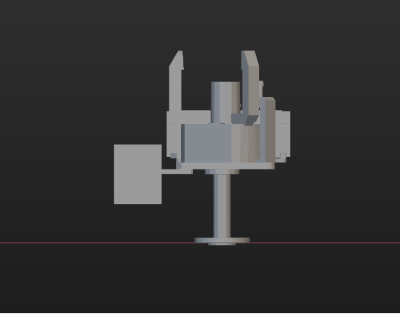
側面図
-
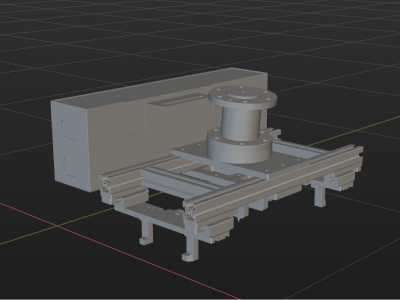
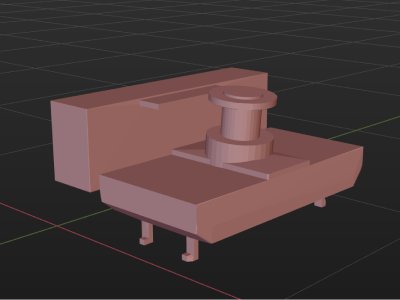
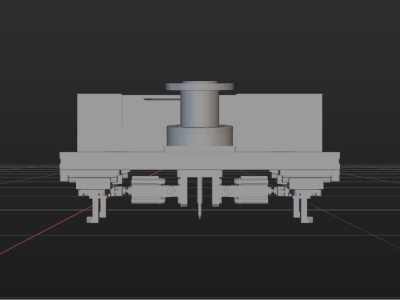
例 2:
ビュー 編集前 編集後 カスタマイズビュー
正面図
側面図
-
例 3:
ビュー 編集前 編集後 カスタマイズビュー
正面図
側面図