外部パラメータ誤差を分析(EIHの場合)
キャリブレーションボードの位置姿勢を取得するためのプロジェクトを作成
-
「カメラから画像を取得」ステップを追加します。
プロジェクトを新規作成し、「カメラから画像を取得」ステップを追加します。もしくは、現在開かれているプロジェクトでこのステップを選択し、パラメータで カメラを選択 をクリックし、カメラを選択して接続し、チェックする外部パラメータグループを選択します。
-
「キャリブレーションボードの位置姿勢の計算とカメラ内部パラメータのチェック」ステップを追加します。
「キャリブレーションボードの位置姿勢の計算とカメラ内部パラメータのチェック」ステップを追加し、それを「カメラから画像を取得」ステップにつなぎます。
-
「位置姿勢を変換」ステップを追加します。
「位置姿勢を変換」ステップを追加し、変換方法を「CameraToRobot」に設定します。その後、「キャリブレーションボードの位置姿勢を計算」ステップをつなぎます。
直行ロボットを使用する場合、「位置姿勢を変換」を「位置姿勢を変換(直行ロボット)」に切り替える必要があります。
-
「出力」ステップを追加します。
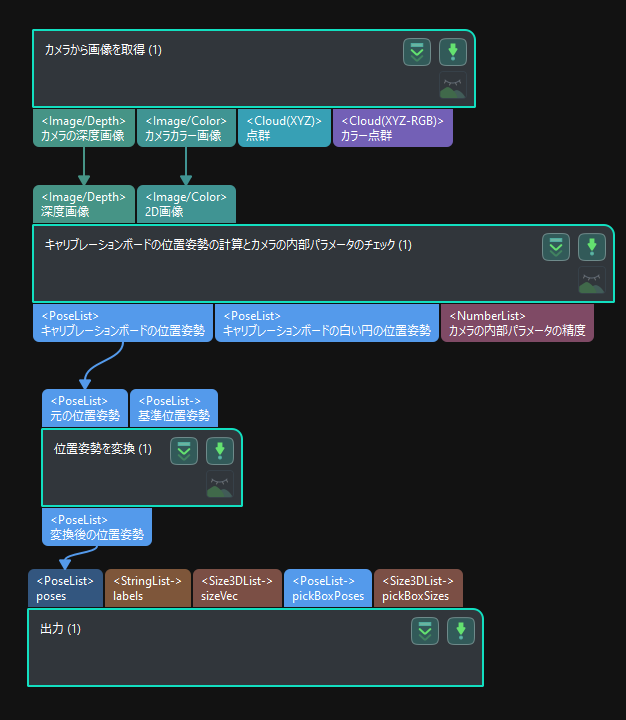
「出力」ステップを追加し、「事前定義済み(ビジョン結果)」ポートタイプを選択します。計算されたキャリブレーションボードの位置姿勢を出力するために、「位置姿勢を変換」ステップの出力ポートを「出力」ステップをにつなぎます。
作成されたプロジェクトを下図に示します。
-
プロジェクトを実行して結果を確認します。
プロジェクトを実行すると、キャリブレーションボードの位置姿勢の計算結果がログバーに表示されます。
ロボットアームにカメラを搭載し、異なる位置からキャリブレーションボードを撮影
ロボットアームにカメラを搭載し、稼働空間の異なる位置に移動します(移動中に並進や回転があることが推奨される)。カメラはプロジェクト実行後に画像を撮影し、キャリブレーションボードの位置姿勢データを記録します。EIHの場合、外部パラメータ誤差を分析するために使用されます。