直行ロボットのキャリブレーション説明
関連概念
直行ロボットの自由度
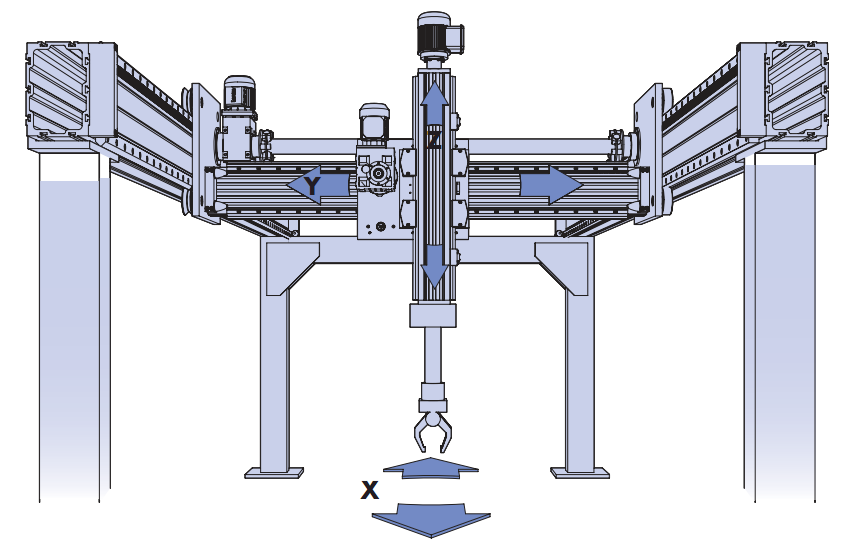
直行ロボットは、多自由度運動をサポートしています。各運動自由度の間の空間における角度を直角とします。
直行ロボットは通常、2-6自由度をサポートしています。詳細は以下の通りです。
-
XYZ方向に3軸の直線運動が可能(3自由度)
-
XYZ方向に3軸の直線運動、Z軸(RzまたはC軸を呼ぶ)の回転が可能(4自由度)
-
XZ方向に2軸の直線運動が可能(2自由度)
-
XZ方向に2軸の直線運動、Z軸の回転が可能(3自由度)
カメラは通常、直行ロボットのいずれかの軸(Z軸、C軸など )に取り付けられています。カメラの撮影位置は、軸の動きに影響されることになります。そのため、キャリブレーション前の設定において、どの軸の動きがカメラの位置に影響を与えるかを指定する必要があります。
左手/右手系
Mech-Mindビジョンシステムでは、右手系でのロボットのフランジ位置姿勢を使用して外部パラメータを計算します。そのため、直行ロボットを使用する場合、その座標系が右手系であるかどうかを確認する必要があります。
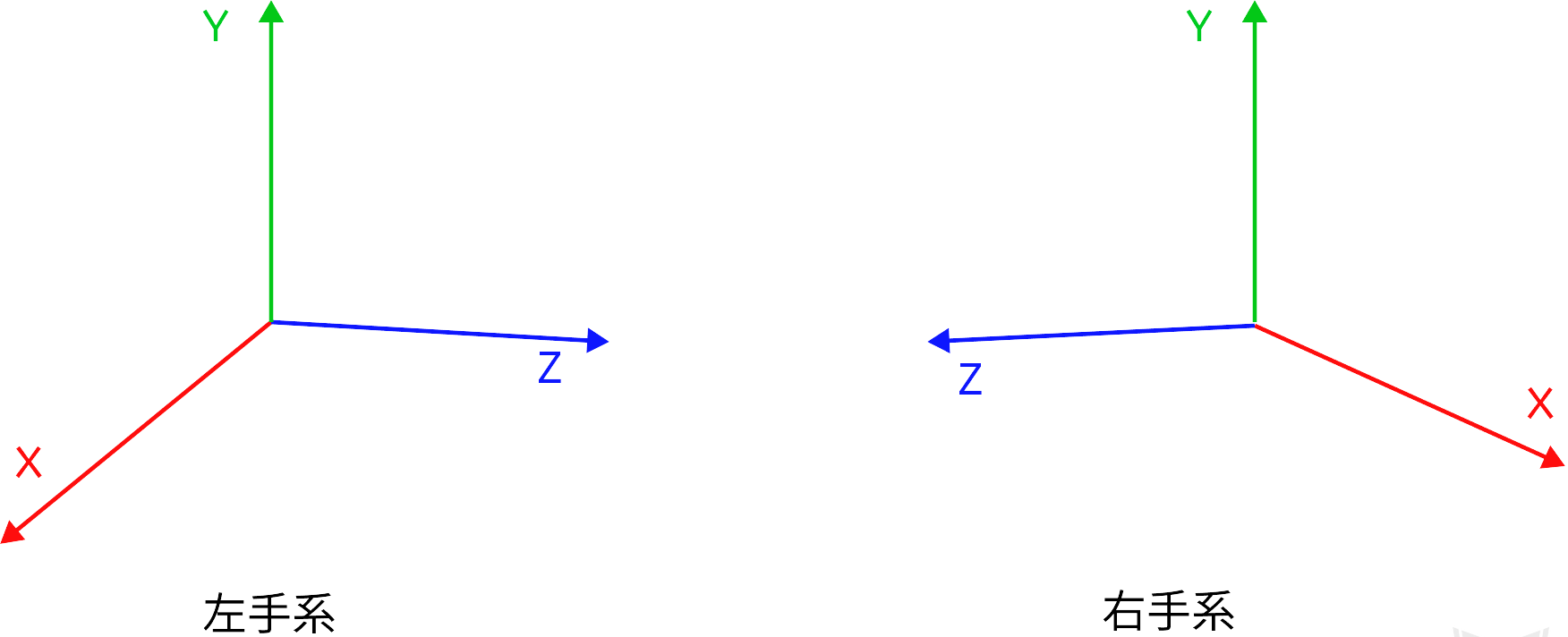
左手系と右手系の判断方法は以下の通りです。
-
左手の親指をX軸の正方向に向け、人差し指をY軸の正方向に向けたとき、中指がZ軸の正方向に向けることができれば、その座標系は左手系です(下図左)。
-
右手の親指をX軸の正方向に向け、人差し指をY軸の正方向に向けた場合、中指がZ軸の正方向に向けることができれば、その座標系は右手系です(下図右)。
直行ロボットの座標系が左手系の場合、その後のキャリブレーションやビジョン処理を容易にするために、それを右手系に変更することを推奨します。通常、直行ロボットのいずれかのXYZ軸のエンコーダーの運動の正方向を反転させる必要があります。一般的には、直行ロボットの台座に取り付けられている軸を反転し、Mech-Visionで右手系を選択してキャリブレーションを行います。
直行ロボットで設定できない場合、Mech-Visionで左手系を選択するだけで、ソフトウェアが自動的に入出力の位置姿勢データに対して変換を行います。
キャリブレーション原理
カメラは通常、直行ロボットのある軸、例えばZ軸に取り付けられ、つまりカメラはEye in Hand方式で取り付けられています。したがって、直行ロボットのキャリブレーションは、カメラ座標系とロボットツール座標系との間の相対関係を求めることを目的としています。
直行ロボットの自由度や作業空間が限られた場合、Mech-VisionはTCPタッチ法を使用してキャリブレーションデータを取得し、キャリブレーションボード、カメラ、ロボット間の関係を確立します。また、直行ロボットのキャリブレーションでは、キャリブレーションボードを複数枚追加することに対応します。自由度の制限による直行ロボットをキャリブレーションボード上の3つのポイントに触れるように動かせない場合、直行ロボットがキャリブレーションボード上の3つのポイント(3ポイントが共線でない)に触れるように複数のキャリブレーションボードを使用することが可能です。
直行ロボットのキャリブレーション原理については、TCPタッチ法を使用するハンド・アイ・キャリブレーション(Eye in Hand) をご参照ください。
外部パラメータの使用
直行ロボットのキャリブレーションプロセスで生成されるのはキャリブレーション位置の外部パラメータファイルです。Mech-Visionは直行ロボットの位置に基づいて動的外部パラメータをリアルタイムで計算します。Mech-Visionプロジェクトでは、動的外部パラメータを計算する際には、点群変換(直行ロボット) および 位置姿勢を変換(直行ロボット) ステップを併用し、カメラ座標系内の点群/位置姿勢を直行ロボットの座標系に変換します。
プロジェクトを実行する際には、直行ロボットがMech-Mindビジョンシステムと正常に通信できることを確認し、ロボットプログラムがMech-Visionプロジェクトの実行をトリガーする際にロボットのフランジ位置姿勢を提供し、「カメラから画像を取得」ステップが画像撮影時のロボットのフランジ位置姿勢を正常に取得できることを確認してください。
|
直行ロボットの座標系が左手系を使用する場合、通信コンポーネントはロボットプログラムから送信されたロボットのフランジ位置姿勢を自動的に右手系に変換し、その後Mech-Visionでビジョン処理を行います。ビジョン結果を返す際に、通信コンポーネントはMech-Visionから出力された直行ロボットの座標系での位置姿勢を左手系に変換し、ロボットプログラムに送信します。 |