ロボットハンド
以下では、ロボットハンドとその関連設定について説明します。
概要
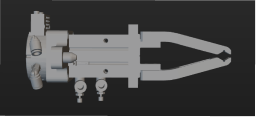
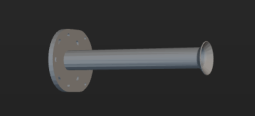
ロボットハンドとは、ロボットが作業を行うために特別に設計され、ロボットのフランジに取り付けられるグリッパーや吸盤などの装置です。
ロボットハンドモデル
仮想空間でロボットハンドを表示し、ロボットハンドの衝突検出を有効にするために、ロボットハンドモデルと衝突モデルを作成してソフトウェアのモデルライブラリにインポートする必要があります。
対応可能な形式は以下の通りです。
形式 |
STL |
OBJ |
DAE |
Binvox |
3Dモデル |
〇 |
〇 |
〇 |
× |
衝突モデル |
〇 |
〇 |
× |
× |
|

ロボットハンドモデルの設定
ロボットハンドの追加
の の + をクリックし、ロボットハンド設定ウィンドウを開きます。
-
ロボットハンド名 に名前を付けて入力します。
-
ロボットハンドの種類 は、実際に応じて選択します。デパレタイズ用吸盤 を使用する場合は デパレタイズ用吸盤を設定 する必要があります。
-
衝突モデル を衝突検出のためのロボットハンドモデルを設定します。
-
3Dモデル を仮想空間に表示するためのロボットハンドモデルを設定します。3Dモデルの位置とサイズが実際と一致しない場合、ロボットハンドモデルの位置またはサイズの調整 を参照して調整してください。
-
実際の状況に応じて 回転対称 を 回転対称性無し、N回対称 に設定します。N回対称 に設定した場合、対称回数 の設定も必要です。
-
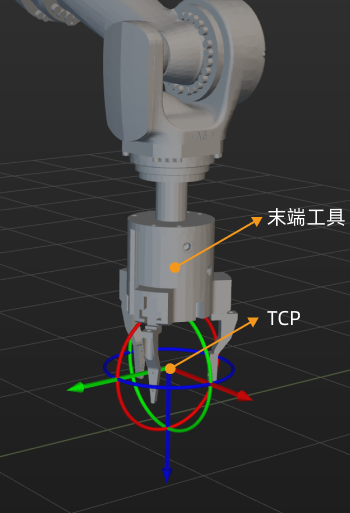
以下のいずれかの方法でTCPを設定します。
ロボットからTCPを更新
TCPキャリブレーション によるTCP取得
オイラー角、四元数、または回転ベクトルタイプのTCPを手動で入力します。
すでに他の方法で正確なTCPを取得している場合は、位置姿勢を調整 をクリックし、位置姿勢編集ツールに貼り付けて設定します。
-
ロボットハンドに制御ロジックを設定する必要がある場合は、下の 一般的なロボットハンドの制御ロジック設定 をクリックします。
-
最後に OK をクリックします。
必要があれば、以上の手順を繰り返してロボットハンドを追加します。
ロボットハンドの削除
ロボットハンドを削除するには、次のいずれの方法を使用します。
-
でロボットハンド名をクリックして Delete を押します。
-
でロボットハンド名をクリックし、ドロップメニューで 削除 をクリックします。
ロボットハンドの変更
-
ロボットハンドの設定画面を開くには、次のいずれかの方法を使用します。
-
でロボットハンド名をダブルクリックします。
-
でロボットハンド名を右クリックし、ドロップメニューで ロボットハンド設定 をクリックします。
-
-
実際に応じて各パラメータ値を調整します。
-
最後に OK をクリックします。
現在のロボットハンドに設定
ロボットハンドが1つだけ追加されている場合、このハンドが現在のロボットハンドになります。
複数のロボットハンドを追加した場合、デフォルトでは最初に追加したロボットハンドが現在のロボットハンドとなります。
ロボットハンドを現在のロボットハンドに設定するには、 でロボットハンドを右クリックして、表示されるメニューで 現在のロボットハンドに設定 をクリックします。
ロボットハンドモデルの位置やサイズを調整
追加したロボットハンドモデルが正しい位置とずれた場合、以下の手順を実行します。
-
のロボットハンドモデルファイルをダブルクリックします。
-
表示されたモデル変換編集ウィンドウで位置姿勢を変更してロボットハンドモデルが仮想空間にある位置を調整します。
追加したロボットハンドモデルのサイズが実際と一致しない場合、以下の手順を実行します。
-
のロボットハンドモデルファイルをダブルクリックします。
-
すると、モデル変換の編集画面が表示されます。
-
モデル全体のスケールを調整するには、スケール の値を変更します。
-
X、Y、Z方向でそれぞれスケールを設定するには、X、Y、Zに同じスケールを適用 にチェックを外してからX、Y、Z方向のスケールをそれぞれ設定します。
-