ロボットの絶対精度をチェック
以下では、ロボットの絶対精度をチェックする方法について説明します。
詳細は以下の通りです。
ロボットの移動距離の誤差を測定
ティーチペンダントを使用して、ロボットを稼働空間内の固定方向(例えばX方向やY方向)に沿って一定距離を移動させます。移動後、実際の移動距離と比較して差を計算します。
例えば、ティーチペンダントでロボットをX方向に1000mm移動させ、その後ロボットの実際の移動距離を測定し、実際の移動距離が998mmである場合、ロボットの移動距離の誤差は2mmとなります。
先端を中心とした回転法によるチェック
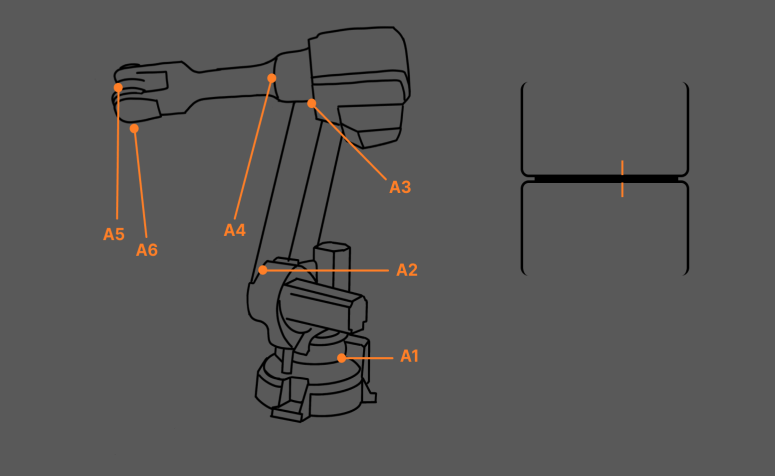
上図に示すように、ロボットの絶対精度をチェックするために、先端を中心とした回転法が用いられます。操作手順は以下の通りです。
-
ロボットフランジに先端を取り付けます。
-
現在の先端のTCP座標をロボットTCPとしてティーチペンダントに入力します。
-
他の先端をロボットの稼働空間に追加し、固定します。
-
ティーチペンダントを使用してロボットを移動させ、ロボットの先端が追加した他の先端と正確にタッチ(先端と先端がタッチ)させます。
-
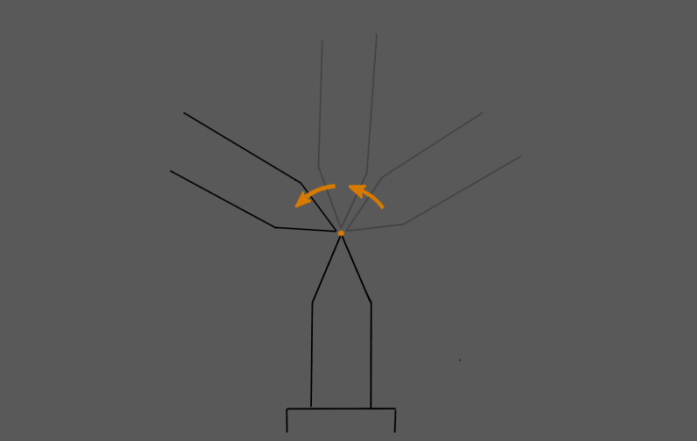
ティーチペンダントを使用してロボットを現在のTCPを中心に回転させ、2つの先端の重なりと距離の変動範囲を確認します。
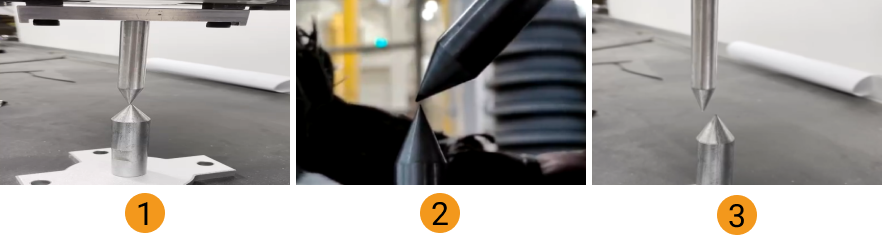
下図では、図1ではロボットのフランジの先端が他の先端と重なっており、これはロボットの絶対精度が良いことを示します。図2では、ロボットのフランジの先端が他の先端とズレながら接触し、ロボットの絶対精度が悪いことを示します。図3では、ロボットのフランジの先端が他の先端と大きくズレながら接触し、ロボットの絶対精度が非常に悪いことを示します。