コンテナ内のスマート経路生成
サンプルプログラムの概要
このサンプルプロジェクトは、コンテナ内のスマート経路生成ステップを使用して単一の深いかごからバラ積みの円筒状ワークをピックアップする方法を説明します。Mech-Viz はコンテナとワークのモデルに基づいて、ロボットが衝突しないようコンテナに進入してワークをピックアップしてから退出する経路を自動的に生成します。
使用する例は以下のようです。


ワークフローの構築
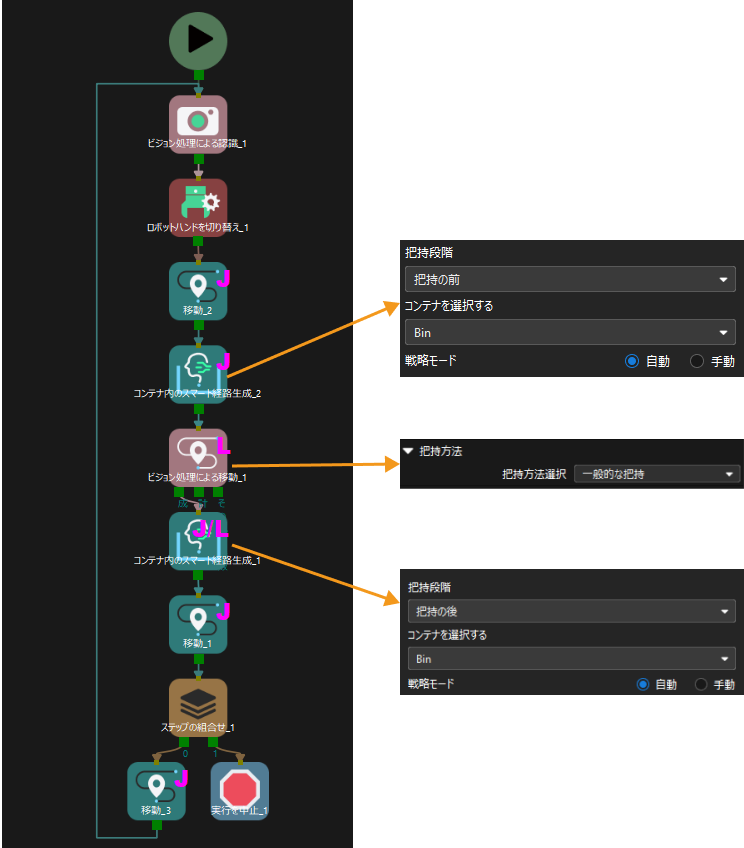
コンテナ内のスマート経路生成ステップを使用して以下のようなワークフローを構築します。
プロジェクト構築時に以下のことにご注意ください。
-
かごに進入する経路とかごを退出する経路にそれぞれコンテナ内のスマート経路生成ステップを配置します。また、コンテナ内のスマート経路生成ステップはビジョン処理による移動ステップを直接接続しなければなりません。
-
ビジョン処理による移動ステップの把持方法を一般的な把持に設定しなければなりません。
-
コンテナ内のスマート経路生成ステップをワークフローの最後に配置してはなりません。その後ろに、経路点が決まった移動ステップを接続しなければなりません。
-
各コンテナ内のスマート経路生成ステップは、2つの経路点に対応します。把持段階が把持の前の場合、対応する経路点はコンテナ進入点と接近点です。把持段階が把持の後の場合、対応する経路点は退出点とコンテナ退出点です。ロボット通信プログラムを書く時、対応する 2つの経路点を受信するようにしてください。
-
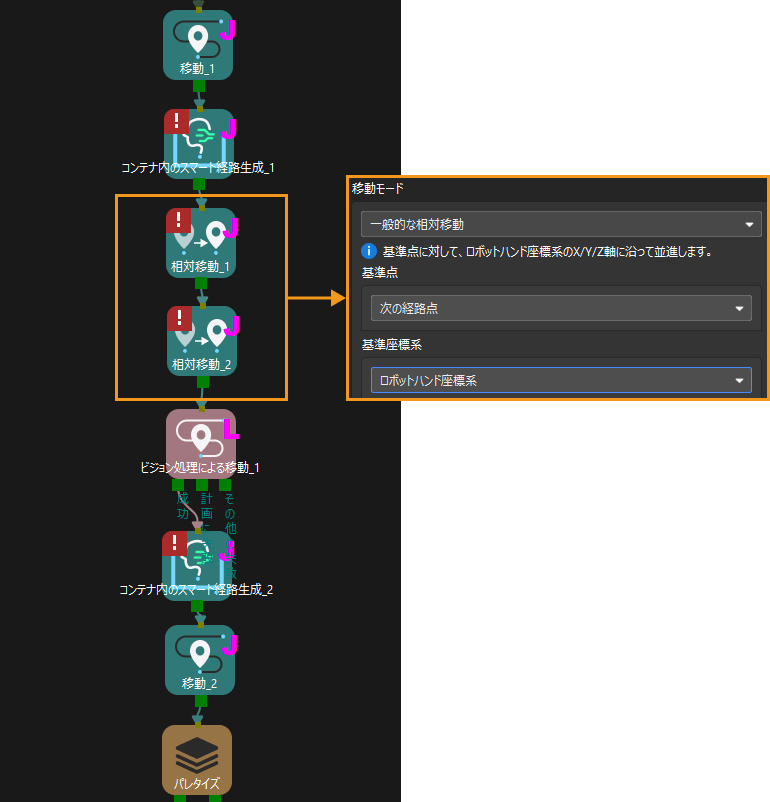
把持段階が把持の前のコンテナ内のスマート経路生成ステップとビジョン処理による移動ステップの間に、1つまたは複数の相対移動ステップを接続することができます。この場合、全ての相対移動ステップの基準点をいずれも次の経路点に設定しなければなりません。
パラメータ調整の説明
-
コンテナ内のスマート経路生成ステップ
把持段階:ビジョン処理による移動ステップの前にあるコンテナ内のスマート経路生成ステップのパラメータ把持段階を把持の前に設定しなければなりません。ビジョン処理による移動ステップの後ろにあるコンテナ内のスマート経路生成ステップの把持段階を把持の後に設定しなければなりません。
コンテナを選択する:ソースツリーのシーンの物体に追加されたコンテナを選択します。コンテナの位置姿勢またはサイズの設定が間違っている場合、もしくは間違ったコンテナを選択した場合、経路の計画が失敗し、また把持の過程で衝突が発生する恐れがあります。
戦略モード:詳細な説明は戦略モードをご参照ください。
-
衝突検出パラメータを設定する
コンテナ内のスマート経路生成ステップを使用する時、衝突検出パネルの対象物衝突検出機能をオンにしなければなりません。

注意事項
このサンプルプロジェクトを現場に使用する時、以下の注意事項を参考にしてプロジェクトを修正・設定することができます。
-
ビジョン処理の記録を無効にして、ビジョン処理による認識ステップを使用して対応する Mech-Vision プロジェクトを呼び出してビジョン処理の結果を取得してください。
-
衝突検出パネルでパラメータを設定してください。